本文的目標(biāo)是研制一個(gè)輪式小車(chē)慣性導(dǎo)航系統(tǒng),能夠通過(guò)wifi實(shí)現(xiàn)PC終端和手持終端控制輪式小車(chē)行動(dòng)以及小車(chē)所采集數(shù)據(jù)的傳輸。
2015-05-15 09:40:11 50434
50434 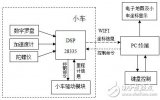
我們駕駛汽車(chē),按著GPS或北斗導(dǎo)航的指示行駛在陌生道路上,當(dāng)穿越隧道時(shí)導(dǎo)航系統(tǒng)依然可以為我們提供方向、速度、里程、時(shí)間等行駛數(shù)據(jù),我們驚嘆于脫離了衛(wèi)星系統(tǒng)的信號(hào)接收,導(dǎo)航系統(tǒng)如何運(yùn)行?這就是慣性技術(shù)為我們續(xù)航。
2018-01-06 07:11:0014851 慣性導(dǎo)航系統(tǒng)是一種利用慣性測(cè)量單元(如加速度計(jì)和陀螺儀)來(lái)測(cè)量和跟蹤物體位置、方向和速度的技術(shù)。在無(wú)人駕駛領(lǐng)域,慣性導(dǎo)航系統(tǒng)通常與衛(wèi)星導(dǎo)航系統(tǒng)(如北斗、GPS)結(jié)合使用,以提供更高精度和更可靠的定位
2023-09-11 17:56:101275 
慣性導(dǎo)航系統(tǒng)的主要定位測(cè)量裝置由加速度傳感器和陀螺儀組成。其中,加速度傳感器是用來(lái)測(cè)量載體所受到的慣性力,并通過(guò)牛頓第二加速度定律獲取被測(cè)載體的加速度值。陀螺儀在該系統(tǒng)中主要是用來(lái)測(cè)量載體的偏航角度。通過(guò)二者的結(jié)合,慣性導(dǎo)航系統(tǒng)能夠通過(guò)加速度值、時(shí)間、偏航角度形成一個(gè)完整的坐標(biāo)體系。
2022-01-17 08:00:006205 車(chē)載GPS/DR 組合導(dǎo)航系統(tǒng)是由哪些部分組成的?
2021-05-17 07:02:14
的工作環(huán)境要求。 SKM-4DX引腳定義: 此慣性導(dǎo)航模塊的優(yōu)勢(shì):(1)擺脫里程計(jì)常規(guī)車(chē)載導(dǎo)航系統(tǒng)往往依靠里程計(jì)和陀螺儀的DR方案,實(shí)現(xiàn)汽車(chē)復(fù)雜環(huán)境下的高精度導(dǎo)航定位,里程計(jì)信號(hào)對(duì)于很多汽車(chē)后裝市場(chǎng)
2020-08-13 01:29:45
諸多導(dǎo)航系統(tǒng)中牢牢的占據(jù)一席之地。 1、慣性導(dǎo)航的理論依據(jù)說(shuō)到慣性導(dǎo)航的理論依據(jù),那就不得不提牛頓對(duì)慣性導(dǎo)航的貢獻(xiàn)!慣性導(dǎo)航里用到的兩個(gè)重要工具:牛頓第二定律和微積分都與牛頓有著密不可分的聯(lián)系
2020-08-14 04:39:59
性導(dǎo)航系統(tǒng) INS( Inertia Navigation System,以下簡(jiǎn)稱慣導(dǎo)) 慣導(dǎo)是一種利用慣性傳感器測(cè)量載體的比力及角速度信息,并結(jié)合給定的初始條件實(shí)時(shí)推算速度、位置、姿態(tài)等參數(shù)的自主
2020-05-18 06:15:18
霍尼韋爾模塊卡件cpu模塊浙江高價(jià)回收,, 浙江霍尼韋爾主板上門(mén)回收公司,回收模塊,霍尼韋爾cpu高價(jià)收購(gòu),高價(jià)回收高價(jià)回收霍尼韋爾plc模塊 卡件 CPU模塊回收霍尼韋爾全新模塊回收歡迎咨詢***同步微信
2020-09-17 16:35:01
霍尼韋爾傳感與控制部擁有領(lǐng)先的開(kāi)關(guān)和傳感器制造解決方案,服務(wù)于各大重要行業(yè),并提供世界范圍的銷(xiāo)售、制造和技術(shù)支持服務(wù),作為霍尼韋爾自動(dòng)化控制系統(tǒng)集團(tuán)的戰(zhàn)略業(yè)務(wù)部門(mén),霍尼韋爾傳感與控制部提供具有全球
2020-04-22 06:53:21
隨著定位導(dǎo)航技術(shù)的飛速發(fā)展和日臻成熟,車(chē)載導(dǎo)航系統(tǒng)在相關(guān)領(lǐng)域得到了越來(lái)越廣泛的應(yīng)用。車(chē)載導(dǎo)航系統(tǒng)的功能是幫助用戶確定車(chē)輛位置并提供正確的操縱指示,因此定位的精確程度成為衡量一套系統(tǒng)性能優(yōu)劣的重要指標(biāo)。目前,常用的定位手段有 GPS衛(wèi)星定位、慣性導(dǎo)航定位和組合導(dǎo)航定位等。
2019-10-25 07:17:22
+慣性組合導(dǎo)航模塊SKG12UC, SKG12UC模組融合了北斗高精度衛(wèi)星定位和慣性導(dǎo)航技術(shù),為復(fù)雜的城市環(huán)境提供組合導(dǎo)航,適用于各種形態(tài)車(chē)載終端導(dǎo)航系統(tǒng),在高架遮擋、山間隧道、城市峽谷、地下停車(chē)場(chǎng)等
2019-07-15 04:35:55
GPS是什么?GPS模塊在便攜式導(dǎo)航系統(tǒng)中有什么應(yīng)用?
2021-05-14 06:26:52
低成本的INS/ GPS 組合導(dǎo)航系統(tǒng) ,是一類(lèi)非常適合構(gòu)建微型捷聯(lián)慣性導(dǎo)航系統(tǒng)的慣性傳感器。MEMS慣性傳感器的突出特點(diǎn)使其在眾多的民用和軍用領(lǐng)域具有廣闊的應(yīng)用前景。
2020-05-18 06:28:30
上海回收霍尼韋爾回收霍尼韋爾全新DCS卡件以及plc模塊回收霍尼韋爾卡件回收橫河plc模塊 CPU模塊620-0048 HONEY WELL霍尼韋爾 DCS卡件TK-IDD321霍尼韋爾
2020-07-19 16:44:34
上海回收霍尼韋爾掃描槍回收霍尼韋爾DCS卡件霍尼韋爾模塊HONEY WELL霍尼韋爾DDC可編程控制器XL50TC-FXX132霍尼韋爾 HONEYWELL 框架TK-CCR014霍尼韋爾 網(wǎng)絡(luò)接口
2020-07-17 10:22:14
東莞回收霍尼韋爾CPU模塊求購(gòu)霍尼韋爾DCS卡件回收霍尼韋爾和橫河卡件以及plc模塊回收霍尼韋爾卡件回收橫河plc模塊 CPU模塊620-0048 HONEY WELL霍尼韋爾 DCS卡件
2020-07-17 10:30:07
`高價(jià)回收霍尼韋爾plc模塊收購(gòu)霍尼韋爾卡件求購(gòu)掃描器回收霍尼韋爾卡件模塊大量回收霍尼韋爾掃描槍高價(jià)回收 霍尼韋爾Honeywell、51304335-100,MU-TAOX2
2020-08-18 13:11:23
北京時(shí)間2003年5月25日零時(shí)34分,我國(guó)在西昌衛(wèi)星發(fā)射中心用"長(zhǎng)征三號(hào)甲"運(yùn)載火箭,成功地將我國(guó)自行研制的第三顆"北斗一號(hào)"導(dǎo)航定位衛(wèi)星送入太空。這標(biāo)志著我國(guó)已建立了完善的自主衛(wèi)星導(dǎo)航系統(tǒng),對(duì)我國(guó)國(guó)民經(jīng)濟(jì)建設(shè)將起到積極作用。
2019-08-23 06:48:38
聯(lián)系方式***同步微信,,,常州回收plc模塊收購(gòu)霍尼韋爾DCS卡件模塊回收霍尼韋爾plc模塊 卡件回收霍尼韋爾品牌卡件 配件 plc模塊霍尼韋爾卡件配件plc模塊大量回收HC900霍尼韋爾
2020-07-26 22:11:22
吳江-吳中-常熟高價(jià)回收霍尼韋爾plc模塊霍尼韋爾掃描器回收plc模塊收購(gòu)霍尼韋爾DCS卡件模塊回收霍尼韋爾plc模塊 卡件回收霍尼韋爾品牌卡件 配件 plc模塊霍尼韋爾卡件配件plc模塊大量
2020-07-21 19:58:39
回收霍尼韋爾DCS卡件回收霍尼韋爾plc模塊回收霍尼韋爾和橫河卡件以及plc模塊回收霍尼韋爾卡件回收橫河plc模塊 CPU模塊620-0048 HONEY WELL霍尼韋爾 DCS卡件
2020-07-19 16:40:58
回收霍尼韋爾DCS 51304338-100 霍尼韋爾模塊,S1304650-100 MU-TD0013霍尼韋爾HONEYWELL51304362-35V 霍尼韋爾Honeywell模塊霍尼韋爾
2021-05-11 11:34:58
價(jià)回收霍尼韋爾plc模塊 卡件CPU模塊回收霍尼韋爾全新模塊回收全新霍尼韋爾回收霍尼韋爾掃描槍以及卡件霍尼韋爾卡件電子元器件高價(jià)回收 霍尼韋爾Honeywell、51304335-100
2021-05-11 11:44:26
基于加速度計(jì)的無(wú)陀螺慣性導(dǎo)航系統(tǒng)的研究汽車(chē)狀態(tài)的實(shí)時(shí)準(zhǔn)確測(cè)量是汽車(chē)智能輔助駕駛系統(tǒng)研究的關(guān)鍵問(wèn)題。本文針對(duì)智能輔助駕駛車(chē)輛研究的需求,建立了一套無(wú)陀螺儀式慣性導(dǎo)航系統(tǒng)。該系統(tǒng)沒(méi)有采用傳統(tǒng)的陀螺儀測(cè)量
2009-12-02 12:40:03
大量求購(gòu)霍尼韋爾DCS卡件回收霍尼韋爾plc模塊回收霍尼韋爾品牌卡件 配件 plc模塊霍尼韋爾卡件配件plc模塊大量回收HC900霍尼韋爾900A01-0102 AI8 CHANNEHC900霍
2020-07-19 15:27:39
如何實(shí)現(xiàn)基于Linux的嵌入式車(chē)載導(dǎo)航系統(tǒng)的設(shè)計(jì)?
2021-12-27 07:52:50
車(chē)載導(dǎo)航是利用車(chē)載GPS(全球定位系統(tǒng))配合電子地圖來(lái)進(jìn)行的,它能方便且準(zhǔn)確地告訴駕駛者去往目的地的最短或者最快路徑,是駕駛員的好幫手。 而本文介紹的是研制一個(gè)輪式小車(chē)慣性導(dǎo)航系統(tǒng),能夠通過(guò)
2020-06-14 07:00:00
霍尼韋爾卡件電子元器件高價(jià)回收 霍尼韋爾Honeywell、51304335-100,MU-TAOX2,51304338-100 霍尼韋爾、51304084-100/MU/MC-TP
2020-07-17 13:38:24
山東省回收霍尼韋爾卡件回收霍尼韋爾全系列型號(hào)模塊霍尼韋爾Honeywell、51304335-100,MU-TAOX2,51304338-100 霍尼韋爾、51304084-100/MU/MC-TP
2020-07-16 11:38:44
地理整合性應(yīng)用與其因應(yīng)方案,也就是手持式、車(chē)載 GPS 全球衛(wèi)星導(dǎo)航系統(tǒng),便可解決對(duì)此人們急迫的需求性。基于 S3C2440A 微處理器和 Win CE 5.0 嵌入式操作系統(tǒng),設(shè)計(jì)了一套可靠且
2019-12-10 14:25:28
南京,常州,蘇州,太倉(cāng),張家港,連云港高價(jià)回收霍尼韋爾DCS卡件模塊霍尼韋爾卡件配件plc模塊大量回收HC900霍尼韋爾900A01-0102 AI8 CHANNEHC900霍尼韋爾
2020-08-23 09:12:07
怎么實(shí)現(xiàn)基于51單片機(jī)&GPS的導(dǎo)航系統(tǒng)設(shè)計(jì)?
2021-09-30 07:40:24
怎么實(shí)現(xiàn)基于Linux的嵌入式車(chē)載導(dǎo)航系統(tǒng)的設(shè)計(jì)?
2021-05-18 06:12:50
怎么實(shí)現(xiàn)嵌入式GPS導(dǎo)航系統(tǒng)的設(shè)計(jì)?
2021-05-26 07:07:59
怎么選擇低成本汽車(chē)導(dǎo)航系統(tǒng)?
2021-05-13 06:31:44
為什么要設(shè)計(jì)一種基于STM32的視覺(jué)導(dǎo)航系統(tǒng)呢?怎樣去設(shè)計(jì)一種基于STM32的視覺(jué)導(dǎo)航系統(tǒng)呢?
2021-11-18 07:08:17
捷聯(lián)式慣性導(dǎo)航系統(tǒng)
2016-08-17 12:06:13
昆明回收霍尼韋爾plc模塊收購(gòu)霍尼韋爾全系列卡件 回收全新霍尼韋爾回收霍尼韋爾掃描槍以及卡件霍尼韋爾卡件電子元器件高價(jià)回收 霍尼韋爾Honeywell、51304335-100,MU-TAOX2
2020-07-19 16:42:38
智能導(dǎo)航系統(tǒng)建設(shè)意義是什么?智能導(dǎo)航系統(tǒng)中的關(guān)鍵技術(shù)有哪些?智能導(dǎo)航系統(tǒng)在CDMA無(wú)線數(shù)據(jù)中的應(yīng)用是什么?
2021-05-27 06:57:38
到各自重點(diǎn)發(fā)展的智能交通系統(tǒng)當(dāng)中。本文主要介紹智能汽車(chē)的發(fā)展概況及簡(jiǎn)要介紹智能汽車(chē)的導(dǎo)航系統(tǒng)原理,并分析智能汽車(chē)的發(fā)展前景以及其意義。 關(guān)鍵詞:智能汽車(chē),發(fā)展概況,導(dǎo)航系統(tǒng),發(fā)展前景
2016-04-11 16:56:51
回收霍尼韋爾和橫河卡件以及plc模塊回收霍尼韋爾卡件回收橫河plc模塊 CPU模塊620-0048 HONEY WELL霍尼韋爾 DCS卡件TK-IDD321霍尼韋爾 HONEYWELL DCS卡件
2020-07-16 11:46:47
求GPS/INS組合導(dǎo)航系統(tǒng)原始導(dǎo)航數(shù)據(jù)仿真,加QQ1393177309詳聊,酬金200,感謝!
2014-07-12 12:58:09
為什么要設(shè)計(jì)一個(gè)輪式小車(chē)慣性導(dǎo)航系統(tǒng)?輪式小車(chē)慣性導(dǎo)航系統(tǒng)的軟件裝置怎樣去設(shè)計(jì)?輪式小車(chē)慣性導(dǎo)航系統(tǒng)的硬件裝置怎樣去設(shè)計(jì)?如何去測(cè)試輪式小車(chē)慣性導(dǎo)航系統(tǒng)?
2021-04-19 11:35:46
求購(gòu)霍尼韋爾模塊/卡件/霍尼韋爾底座/回收工廠處理西門(mén)子庫(kù)存PLC模塊;回收霍尼韋爾DCS卡件模塊和西門(mén)子plc模塊高價(jià)格回收西門(mén)子s7-200系列模塊,s7-300系列模塊,s7-400系列
2020-09-03 21:56:02
南京-上海-蘇州回收霍尼韋爾plc模塊 卡件回收霍尼韋爾品牌卡件 配件 plc模塊霍尼韋爾卡件配件plc模塊大量回收HC900霍尼韋爾900A01-0102 AI8 CHANNEHC900霍尼韋爾
2020-07-26 22:01:39
聯(lián)系方式***同步微信收購(gòu)霍尼韋爾cpu模塊回收人機(jī)界面觸摸屏回收霍尼韋爾卡件回收霍尼韋爾DCSplc模塊回收霍尼韋爾卡件回收橫河plc模塊 CPU模塊620-0048 HONEY WELL霍尼韋爾
2020-07-28 12:03:13
江陰回收霍尼韋爾DCS卡件收購(gòu)掃描槍以及霍尼韋爾plc模塊霍尼韋爾模塊HONEY WELL霍尼韋爾DDC可編程控制器XL50TC-FXX132霍尼韋爾 HONEYWELL 框架TK-CCR014霍
2020-07-17 10:54:00
回收霍尼韋爾plc模塊 卡件回收霍尼韋爾品牌卡件 配件 plc模塊霍尼韋爾卡件配件plc模塊大量回收HC900霍尼韋爾900A01-0102 AI8 CHANNEHC900霍尼韋爾
2020-07-16 12:07:44
`一、GPS衛(wèi)星導(dǎo)航GPS衛(wèi)星導(dǎo)航,是根據(jù)GPS衛(wèi)星提供的位置信息,以及導(dǎo)航前規(guī)劃的線路,指引用戶行駛的一個(gè)系統(tǒng)。 二、慣性導(dǎo)航之前有介紹,慣性導(dǎo)航其實(shí)是最早使用的導(dǎo)航系統(tǒng)之一。 慣性導(dǎo)航是一種通過(guò)
2018-03-26 11:26:37
歡迎咨詢***同步微信,蘇州南京常熟高價(jià)回收霍尼韋爾卡件DCS卡件TK-IDD321,專業(yè)回收工廠庫(kù)存霍尼韋爾卡件和掃描槍TC-PCIC02 工控plc模塊 HONEYWELLTC-0AV081
2020-08-23 09:17:10
適應(yīng)性強(qiáng)、易維護(hù)、壽命長(zhǎng)。典型產(chǎn)品是美國(guó)諾格斯佩里公司研制成功的Mk39系列和Mk49型激光陀螺捷聯(lián)式艦船慣性導(dǎo)航系統(tǒng)、美國(guó)霍尼韋爾公司的激光捷聯(lián)慣導(dǎo)系統(tǒng)。光學(xué)陀螺的出現(xiàn)有力推動(dòng)了捷聯(lián)慣性系統(tǒng)發(fā)展。第三代
2020-06-13 08:00:00
基于ARM的GPS/DR導(dǎo)航系統(tǒng)的硬件設(shè)計(jì)基于ARM的GPS/DR導(dǎo)航系統(tǒng)的軟件設(shè)計(jì)
2021-05-17 07:25:16
車(chē)載GPS/DR組合導(dǎo)航系統(tǒng)是由哪些部分組成的?基于DSP的車(chē)載GPS/DR組合導(dǎo)航系統(tǒng)的設(shè)計(jì)
2021-05-12 06:56:21
車(chē)載定位定向導(dǎo)航系統(tǒng)是由哪些部分組成的?怎樣去設(shè)計(jì)車(chē)載定位定向導(dǎo)航系統(tǒng)?
2021-05-13 06:46:43
捷聯(lián)式組合導(dǎo)航系統(tǒng)[1],影響系統(tǒng)精度的主要誤差源有:慣性器件的刻度系數(shù)誤差、零位誤差及軸安裝不對(duì)準(zhǔn)角等。為了確保系統(tǒng)的對(duì)準(zhǔn)和導(dǎo)航精度,必須利用精密轉(zhuǎn)臺(tái)對(duì)以上誤差源進(jìn)行精確標(biāo)定,并通過(guò)系統(tǒng)軟件加以補(bǔ)償。一般情況下,在完成系統(tǒng)標(biāo)定后,若不對(duì)陀螺、加速度計(jì)全文下載
2010-04-24 09:31:29
高價(jià)回收霍尼韋爾plc模塊 卡件CPU模塊回收霍尼韋爾全新模塊回收全新霍尼韋爾回收霍尼韋爾掃描槍以及卡件霍尼韋爾卡件電子元器件高價(jià)回收 霍尼韋爾Honeywell、51304335-100
2020-07-19 15:24:16
嵌入式實(shí)時(shí)操作系統(tǒng)VxWorks在慣性導(dǎo)航系統(tǒng)中的應(yīng)用
2009-03-29 12:26:36 18
18 對(duì)慣性導(dǎo)航系統(tǒng)、北斗雙星定位系統(tǒng)兩者的組合進(jìn)行了研究。建立了慣性/北斗雙星組合導(dǎo)航系統(tǒng)的數(shù)學(xué)模型,針對(duì)雙星系統(tǒng)噪聲特性難于統(tǒng)計(jì)的特點(diǎn)設(shè)計(jì)了可實(shí)時(shí)估計(jì)量測(cè)噪聲的自
2009-12-16 12:46:1339 基于32位系統(tǒng)的車(chē)載多媒體導(dǎo)航系統(tǒng)設(shè)計(jì)
車(chē)載多媒體導(dǎo)航系統(tǒng),是在嵌入安裝在汽車(chē)環(huán)境使用的多媒體系統(tǒng)、導(dǎo)航系統(tǒng)。相對(duì)于手持式的個(gè)人導(dǎo)航產(chǎn)品(PND),車(chē)載多媒體導(dǎo)
2008-08-20 10:06:02577 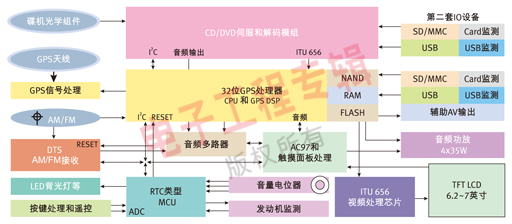
GPS導(dǎo)航系統(tǒng),GPS導(dǎo)航系統(tǒng)是什么意思
GPS百科名片GPS 是英文Global Positioning System(全球定位系統(tǒng))的簡(jiǎn)稱,而其中文簡(jiǎn)稱為“球位系”
2010-03-10 11:48:158926 什么是汽車(chē)的導(dǎo)航系統(tǒng)
汽車(chē)導(dǎo)航系統(tǒng)
GPS是以全球24顆定位人造衛(wèi)星做基礎(chǔ),向全球各地全天候地提供三維位置
2010-03-12 09:28:44582 設(shè)計(jì)了一款基于MEMS陀螺和MEMS加速度計(jì)的低成本微慣性導(dǎo)航系統(tǒng)。采用“四元數(shù)”法進(jìn)行姿態(tài)計(jì)算,通過(guò)比力變換、積分
2010-12-29 15:05:332180 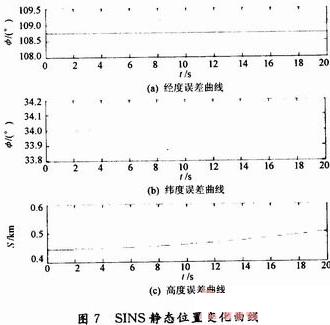
航空慣性導(dǎo)航產(chǎn)品主要是以慣性導(dǎo)航技術(shù)為核心,將衛(wèi)星導(dǎo)航系統(tǒng)、多普勒導(dǎo)航系統(tǒng)等多系統(tǒng)信息融合構(gòu)成的綜合導(dǎo)航產(chǎn)品。
2018-01-01 16:43:575864 目前,GPS/ INS組合導(dǎo)航系統(tǒng)已經(jīng)獲得了廣泛的應(yīng)用,尤其在軍事領(lǐng)域。隨著MEMS慣性傳感器性能不斷提升,當(dāng)前已達(dá)到中等精度,能滿足大量戰(zhàn)術(shù)武器的使用要求。由于MEMS慣性傳感器采用集成電路的加工
2018-02-01 13:54:200 慣性導(dǎo)航系統(tǒng) INS( Inertia Navigation System ,以下簡(jiǎn)稱慣導(dǎo) ) 慣導(dǎo)是一種利用慣性傳感器測(cè)量載體的比力及角速度信息,并結(jié)合給定的初始條件實(shí)時(shí)推算速度、位置、姿態(tài)等參數(shù)的自主式導(dǎo)航系統(tǒng).具體來(lái)說(shuō)慣性導(dǎo)航系統(tǒng)屬于一種推算導(dǎo)航方式。
2018-04-26 09:06:0062948 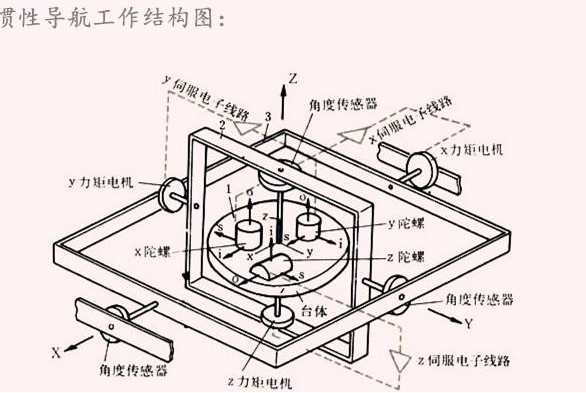
慣性導(dǎo)航(Inertial Navigation)是20 世紀(jì)中期發(fā)展起來(lái)的完自主式的導(dǎo)航技術(shù)。通過(guò)慣性測(cè)量組件(IMU)測(cè)量載體相對(duì)慣性空間的角速率和加速度信息,利用牛頓運(yùn)動(dòng)定律自動(dòng)推算載體
2018-03-02 16:23:3116377 慣性導(dǎo)航系統(tǒng)(INS,Inertial Navigation System)也稱作慣性參考系統(tǒng),是一種不依賴于外部信息、也不向外部輻射能量(如無(wú)線電導(dǎo)航那樣)的自主式導(dǎo)航系統(tǒng)。其工作環(huán)境不僅包括空中
2018-03-04 09:25:442683 。INS(慣性導(dǎo)航系統(tǒng)):以牛頓力學(xué)定律為基礎(chǔ),通過(guò)測(cè)量載體在慣性參考系的加速度,將它對(duì)時(shí)間進(jìn)行積分,且把它變換到導(dǎo)航坐標(biāo)系中,就能夠得到在導(dǎo)航坐標(biāo)系中的速度、姿態(tài)和位置等信息。? ? ? INS(慣性
2018-04-27 11:05:034106 慣性導(dǎo)航系統(tǒng)根據(jù)陀螺儀的不同,可分為機(jī)電(包含液浮、氣浮、靜電、 撓性等種類(lèi))陀螺儀、光學(xué)(包含激光、光纖等種類(lèi)) 陀螺儀、微機(jī)械(MEMS)陀螺儀等類(lèi)型的慣性導(dǎo)航系統(tǒng)。
2018-05-10 17:09:4133758 慣性導(dǎo)航系統(tǒng)是隨慣性傳感器(陀螺儀和加速度計(jì))技術(shù)的發(fā)展而發(fā)展起來(lái)的一門(mén)導(dǎo)航技術(shù),由于具有完全自主,不受任何干擾,隱蔽性強(qiáng),輸出信息量大,輸出信息實(shí)時(shí)性強(qiáng)等優(yōu)點(diǎn),在軍事領(lǐng)域和民用領(lǐng)域都得到了廣泛
2018-10-30 19:45:3514 慣性導(dǎo)航(inertial navigation)是一種通過(guò)測(cè)量飛行器的加速度,并自動(dòng)進(jìn)行積分運(yùn)算,獲得飛行器瞬時(shí)速度和瞬時(shí)位置數(shù)據(jù)的技術(shù)。組成慣性導(dǎo)航系統(tǒng)的設(shè)備都安裝在運(yùn)載體內(nèi),工作時(shí)不依賴外界信息,也不向外界輻射能量,不易受到干擾,是一種自主式導(dǎo)航系統(tǒng)。
2019-03-12 09:13:5512808 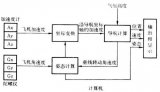
質(zhì)量的導(dǎo)航系統(tǒng)通常其不準(zhǔn)確度,在位置上小于0.6海里每小時(shí),在方向上小于幾十分之一度每小時(shí)。 如果導(dǎo)航系統(tǒng)故障,依然可以令飛機(jī)不偏離軌道。因此,慣性導(dǎo)航通常是用于支持其他導(dǎo)航系統(tǒng),提供比使用任何單一系統(tǒng)更高的精確度。
2020-06-08 17:28:274952 慣性導(dǎo)航系統(tǒng)(INS)也稱作慣性參考系統(tǒng),是一種不依賴于外部信息、也不向外部輻射能量(如無(wú)線電導(dǎo)航那樣)的自主式導(dǎo)航系統(tǒng)。其工作環(huán)境不僅包括空中、地面,還可以在水下。 慣性導(dǎo)航的基本工作原理是以牛頓
2020-06-08 15:29:432058 慣性導(dǎo)航系統(tǒng)有如下優(yōu)點(diǎn): 1、由于它是不依賴于任何外部信息,也不向外部輻射能量的自主式系統(tǒng),故隱蔽性好,也不受外界電磁干擾的影響 2、可全天候、全時(shí)間地工作于空中、地球表面乃至水下 3、能提供位置
2020-06-08 15:26:4425013 慣性導(dǎo)航在車(chē)上的應(yīng)用 從慣性導(dǎo)航的定義來(lái)看,慣性導(dǎo)航是一種通過(guò)測(cè)量飛行器的加速度,并自動(dòng)進(jìn)行積分運(yùn)算,獲得飛行器瞬時(shí)速度和瞬時(shí)位置數(shù)據(jù)的技術(shù)。組成慣性導(dǎo)航系統(tǒng)的設(shè)備都安裝在運(yùn)載體內(nèi),工作時(shí)不依賴外界
2020-06-01 10:21:443293 車(chē)載系統(tǒng)中慣導(dǎo)的應(yīng)用 從慣性導(dǎo)航的定義來(lái)看,慣性導(dǎo)航是一種通過(guò)測(cè)量飛行器的加速度,并自動(dòng)進(jìn)行積分運(yùn)算,獲得飛行器瞬時(shí)速度和瞬時(shí)位置數(shù)據(jù)的技術(shù)。組成慣性導(dǎo)航系統(tǒng)的設(shè)備都安裝在運(yùn)載體內(nèi),工作時(shí)不依賴外界
2020-06-08 14:41:521899 慣性是所有質(zhì)量體的基本屬性,所有建立在慣性原理基礎(chǔ)上的慣性導(dǎo)航系統(tǒng),無(wú)需任何外來(lái)信息,僅靠系統(tǒng)本身就能在全天候條件下全球范圍內(nèi)和所有介質(zhì)環(huán)境里自主地、隱蔽地進(jìn)行三維定位和三維定向。所以,慣性導(dǎo)航是重要載體不可缺少的核心導(dǎo)航設(shè)備。
2020-07-31 11:49:067511 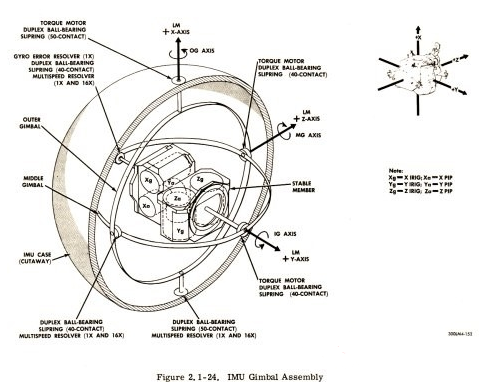
慣性導(dǎo)航系統(tǒng)(INS,以下簡(jiǎn)稱慣導(dǎo))是一種不依賴于外部信息、也不向外部輻射能量的一種自主式導(dǎo)航系統(tǒng),主要由陀螺儀和加速度計(jì)兩部分組成。
2020-10-20 16:11:572834 作為黃隴礦區(qū)首套引進(jìn)的LASC慣性導(dǎo)航系統(tǒng),該系統(tǒng)采用軍用高精度光纖陀螺儀和定制的定位導(dǎo)航算法,可以實(shí)時(shí)監(jiān)測(cè)采煤機(jī)三維姿態(tài)、精準(zhǔn)定位,實(shí)現(xiàn)工作面自動(dòng)調(diào)直,采煤工藝水平控制、遠(yuǎn)程監(jiān)測(cè)與控制等功能。
2021-02-23 10:28:294153 電子發(fā)燒友網(wǎng)報(bào)道(文/李誠(chéng))慣性導(dǎo)航系統(tǒng)是一種不受電磁波干擾,且不依靠外界信號(hào)即可完成自主定位的導(dǎo)航系統(tǒng)。
2022-01-19 15:46:232581 1、引言
多年來(lái),慣性導(dǎo)航系統(tǒng)(INS)[1,2]被廣泛用于估計(jì)傳感平臺(tái)(如自動(dòng)駕駛車(chē)輛)的6自由度姿態(tài)(位置和方向),特別是在GPS信號(hào)缺乏的環(huán)境,如水下,室內(nèi),城市峽谷或在其他星球
2022-07-06 09:50:171560 ANELLO GNSS慣性導(dǎo)航系統(tǒng)(INS)在GPS拒止環(huán)境里可提供長(zhǎng)達(dá)30分鐘的連續(xù)精確的航位推算。
2023-05-29 09:57:05467 
慣性系統(tǒng)是一種自主航位推算導(dǎo)航系統(tǒng),它利用慣性傳感器、參考方向和初始位置信息來(lái)確定載體的方位、位置和速度。它至少應(yīng)包括一個(gè)慣性測(cè)量裝置、一臺(tái)數(shù)字計(jì)算機(jī)、一個(gè)控制顯示裝置和一個(gè)專用精密電源。
2023-07-06 15:24:522291 
慣性導(dǎo)航技術(shù)是慣性技術(shù)的核心和發(fā)展標(biāo)志,慣性導(dǎo)航系統(tǒng) (Inertia navigation system,INS) 利用陀螺儀和加速度計(jì) (統(tǒng)稱為慣性儀表) 同時(shí)測(cè)量載體運(yùn)動(dòng)的角速度和線加速度,并通過(guò)計(jì)算機(jī)實(shí)時(shí)計(jì)算出載體的三維姿態(tài)、 速度、 位置等導(dǎo)航信息。
2023-08-22 09:56:072995 
電子發(fā)燒友網(wǎng)站提供《使用ADIS16470和PNI地磁傳感器RM3100構(gòu)建的捷聯(lián)慣性導(dǎo)航系統(tǒng).pdf》資料免費(fèi)下載
2023-11-22 10:34:480 關(guān)于慣性導(dǎo)航的7大誤解
2023-12-04 15:32:25255 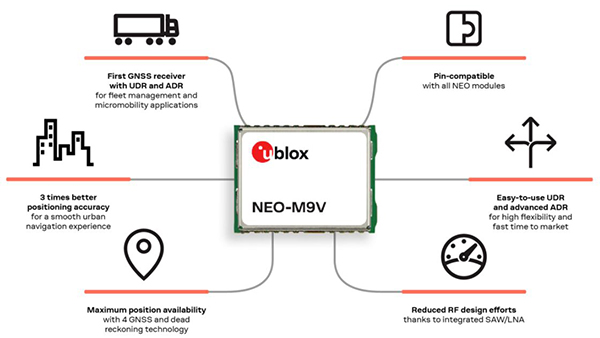
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論