 電子發燒友App
電子發燒友App


關鍵詞:本機振蕩器 直接數字頻率合成 自動頻率控制 脈內測頻
雷達系統根據其工作頻率一般分為米波雷達、分米波雷達和厘米波雷達,其接收機通常是超外差形式的。分米波雷達和厘米波雷達由于其工作頻率較高,一般都有自動頻率控制(AFC)系統,控制本振頻率自動跟蹤發射頻率的變化,或者控制發射頻率自動穩定在本振頻率對應的頻率點上,保證雷達接收機的中頻頻率穩定。但是傳統的模擬式單環路或雙環路AFC系統由于受模擬電路本身的局限,使得AFC的跟蹤速度慢、跟蹤頻率范圍窄、精度低,甚至有可能出現錯誤跟蹤的情況;此外,控制本振的自頻控雷達由于在本機振蕩器上加裝了頻率調整裝置,影響了本振的頻率穩定度,這對動目標雷達而言是難以接受的。米波雷達由于其工作頻率較低,基本上沒有自動頻率控制系統,但是米波雷達的發射機工作頻率和接收機本機振蕩頻率由于環境溫度、電源電壓和負載變化而發生一定的變化,其變化范圍從幾十千赫茲到數百千赫茲,通常在500~600kHz之間。雖然由此造成的中頻頻率變化量的絕對值不會超出中頻放大器的通頻帶范圍(中頻放大器的通頻帶通常≤1MHz),但是數百千赫茲的變化量使回波信號不能得到最有效的放大,造成雷達接收機技術、戰術性能降低,此時即使加裝DSU(Digital Stable Unit)設備,也由于中頻頻率漂移的影響,使DSU的性能無法得到最有效的發揮。
應用鎖相環頻率合成技術實現雷達自動頻率控制系統已經是比較成熟的技術方案,這種方案的應用解決了非相參雷達的自動頻率跟蹤與本振頻率穩定度之間的矛盾,但是鎖相環固有的大慣性、大步進間隔和非線性誤差卻嚴重地限制著鎖相環自動頻率控制系統的性能,使其無法滿足高速、高頻率分辨率、大帶寬的要求。
DDS技術是近幾年來迅速發展的頻率合成技術,它采用全數字化的技術,具有集成度高、體積小、相對帶寬寬、頻率分辨率高、跳頻時間短、相位連續性好、可以寬帶正交輸出、可以外加調制的優點,并能直接與單片機接口構成智能化的頻率源。基于DDS技術的自適應米波雷達自動頻率控制系統是新一代的自動頻率控制(AFC)系統,它以直接數字頻率合成技術(DDS)為基礎,以單片機為控制核心,通過高速高精度脈內頻率測量模塊對雷達發射頻率進行精確測量,然后由單片機控制DDS,對發射頻率進行搜索和跟蹤。因此它是一種易于實現的數字式智能化自適應頻率控制系統。
圖2 DDS頻率合成模塊結構圖
1 系統組成及工作原理
基于DDS技術的自適應米波雷達自動頻率控制系統主要由高速脈內頻率測量模塊、DDS頻率合成模塊、單片機和包括頻率顯示、控制鍵盤的人機接口模塊組成,如圖1所示。
系統采用高速高精度實時脈內頻率測量技術,利用頻率穩定度高達10-9的高穩恒溫時標對頻率進行倒計數法測量,由單片機對測量結果進行分析處理,并控制DDS頻率合成模塊,完成對發射頻率的搜索和跟蹤。系統中除了DDS輸出后的濾波、放大電路采用模擬電路外,其它全部采用高速數字電路,并結合了單片機具有的可編程能力,使系統避免了傳統模擬式AFC的缺陷,能夠實現更加靈活的控制。
雷達開機后,系統首先工作于搜索模式:單片機控制DDS頻率合成模塊輸出本振頻率的最低值,與從發射機耦合過來并經過衰減后的發射脈沖頻率混頻, 取出下變頻后的中頻信號,經過頻率測量模塊測量后將結果送入單片機,單片機若判斷頻率測量結果不是規定的中頻頻率值,則控制DDS頻率合成模塊將輸出的本振頻率按規定的步長(通常是頻率測量系統的頻率分辨率)調高,重復此過程,直到頻率測量系統測量得到的頻率值為規定的中頻頻率值為止。若搜索過程中本振頻率達到上限時仍未搜索到規定的中頻頻率值,則返回到本振頻率最低值,重新開始新一輪的搜索。系統一旦搜索到規定的中頻頻率值就進入跟蹤狀態。
取出下變頻后的中頻信號,經過頻率測量模塊測量后將結果送入單片機,單片機若判斷頻率測量結果不是規定的中頻頻率值,則控制DDS頻率合成模塊將輸出的本振頻率按規定的步長(通常是頻率測量系統的頻率分辨率)調高,重復此過程,直到頻率測量系統測量得到的頻率值為規定的中頻頻率值為止。若搜索過程中本振頻率達到上限時仍未搜索到規定的中頻頻率值,則返回到本振頻率最低值,重新開始新一輪的搜索。系統一旦搜索到規定的中頻頻率值就進入跟蹤狀態。
在跟蹤狀態,頻率測量模塊對每一個發射脈沖頻率與本振頻率下變頻得到的中頻脈沖頻率進行實時精確測量,在發射脈沖結束時將測量結果送入單片機。單片機立即根據測量結果計算出響應的本振頻率調整量,并控制DDS頻率合成模塊調整輸出頻率,保證在目標回波信號到達接收機時,本振信號已經調整到與該發射脈沖頻率對應的頻率點上,使目標回波信號下變頻后的頻率值為準確的中頻頻率值,從而保證目標回波信號能夠得到最有效的放大。
跟蹤模式實質上是一個自適應的控制過程:某一發射脈沖的頻率比前一發射脈沖的頻率升高(降低)→在本振頻率不變的條件下,中頻頻率升高(降低)→頻率測量模塊的測量結果升高(降低)→單片機得到測量結果后控制DDS頻率合成模塊,使之輸出的本振頻率相應升高(降低)→中頻頻率降低(升高)到規定值。
2 硬件結構
2.1 DDS頻率合成模塊
DDS頻率合成模塊以DDS芯片AD9854為核心,包括濾波電路、放大電路和與單片機的接口電路,圖2是其組成框圖。
AD公司推出的AD9854是DDS芯片中的典型代表之一,它具有300MHz的內部時鐘,4~20倍的內部可編程倍頻器使外部輸入的時鐘信號頻率可以從15MHz到75MHz,另外具有100MHz的并行接口總線,內置正交雙通道DAC輸出,具有多種編程工作方式,能產生線性調頻信號和非線性調頻信號等復雜信號。
AD9854采用CMOS結構,工作電壓為3.3V,而單片機AT89C51工作在5V電壓下,其總線電平是5V的TTL電平,為保證AD9854的正常工作,必須經電平轉換后再與AD9854接口,AD9854的時鐘信號也必須經過電平轉換后送到AD9854的時鐘引腳。AD9854有正交雙通道DAC輸出,每一個通道都是反相的互補輸出,經MAX436放大后濾波,然后再經MAX436放大到雷達要求的本振電平。 兩路輸出中的一路用于和發射脈沖混頻,將下變頻后的中頻信號送到頻率測量模塊進行頻率測量,系統已經知道DDS頻率合成模塊輸出的本振頻率,測量出發射脈沖的中頻頻率就能計算出發射頻率;另一路作為接收機的本振信號。
兩路輸出中的一路用于和發射脈沖混頻,將下變頻后的中頻信號送到頻率測量模塊進行頻率測量,系統已經知道DDS頻率合成模塊輸出的本振頻率,測量出發射脈沖的中頻頻率就能計算出發射頻率;另一路作為接收機的本振信號。
根據奈奎斯特采樣定律,當DDS系統的時鐘為300MHz時,其輸出頻率的上限是150MHz,在工程應用中通常只使用到時鐘頻率的40%,即120MHz。某型米波雷達的本振頻率上限略高于120MHz,經查閱AD9854的數據手冊,其輸出頻率能夠達到理論的150MHz;同時經實驗證實,AD9854能夠在雷達本振頻率上限值處穩定工作,且輸出信號質量完全可以滿足雷達系統對本振的要求。
2.2 高速高精度脈內頻率測量模塊
高速高精度脈內頻率測量模塊采用倒計數法進行頻率測量,主要由下變頻混頻器、濾波整形電路、計數器T0、計數器T1和時序控制電路組成。圖3是其結構的組成框圖,圖4是倒計數法頻率測量的時序圖。
倒計數法測頻是用被測信號的N個周期形成一個計數門時間T=N·Tx,在T時間內由時標F0計數,這樣一來測頻就相當于測量門寬T,T的最大量化誤差是T0,Tx的最大量化誤差是T0/N。
某型雷達的發射脈沖的寬度是13μs,考慮到其發射機是單級振蕩式發射機,每個脈沖在起振和停振的過程中振蕩不穩定,因此取中間的10μs作為測頻區間。該型雷達的第一中頻頻率為30MHz,在正常工作時,發射脈沖與本振信號下變頻的輸出頻率應該是準確的30MHz,在10μs的測頻時間內應有300個脈沖,即可取N=300;高穩定的時標的頻率是100MHz,T0=10ns,相應的Tx的最大誤差是T0/300=1/30ns,據此可計算出測頻的分辨率是30kHz,相對于雷達中頻放大器接近1MHz的帶寬而言,此指標完全能夠滿足雷達系統的要求。用頻譜分析儀實際測得的系統跟蹤誤差如表1所示。
表1 實際測得的系統跟蹤誤差表
| 發射頻率/MHz | 147.000 | 147.500 | 148.000 | 148.500 | 149.000 | 149.500 |
| 本振輸出頻率/MHz | 116.999 | 117.495 | 118.008 | 118.492 | 118.990 | 119.493 |
| 跟蹤誤差/kHz | -1 | -5 | +8 | -8 | -10 | -7 |
| 發射頻率/MHz | 150.000 | 150.500 | 151.000 | 151.500 | 152.000 | 152.500 |
| 本振輸出頻率/MHz | 119.995 | 120.490 | 120.990 | 121.510 | 122.005 | 122.500 |
| 跟蹤誤差/kHz | -5 | -10 | -10 | +10 | +5 | 0 |
模塊的工作過程是:當雷達觸發脈沖到來時,時序控制電路打開計數器T,發射脈沖隨后到來,經下變頻、濾波、整形后轉換成TTL方波作為計數器T的時鐘。當計數器T計到第32個脈沖時,時序控制電路打開計數器T0,T0開始對高穩定時標計數;當計數器T計到第332個脈沖時,時序控制電路關閉計數器T和T0,并通知單片機已經完成一次頻率測量,單片機取走測量結果,并對硬件電路復位,準備下一個周期的測量。
2.3 高穩定度恒溫時鐘模塊
本機振蕩器的頻率穩定度是影響雷達接收機性能的關鍵性指標。由于DDS頻率合成方法的輸出頻率穩定度僅僅取決于其時鐘的頻率穩定度,因此選用頻率穩定度高達10-9的恒溫晶體振蕩器作為整個系統的時鐘。恒溫晶體振蕩器輸出的100MHz高穩正弦波經放大后整形為標準的TTL方波,一路作為頻率測量模塊的時間標準,另一路經F161分頻為25MHz的TTL方波,經電平轉換后作為AD9854的外部時鐘信號,利用AD9854內部的可編程倍頻器倍頻12倍使AD9854工作在300MHz的內部時鐘頻率下。高穩定度恒溫時鐘模塊組成框圖如圖5所示。
3 軟件結構
單片機是整個系統的控制核心,可以充分利用軟件可編程控制的優勢對系統進行靈活有效的控制。圖6是單片機的軟件框圖。
通電以后單片機首先進行初始化,然后設置DDS模塊的工作模式等參數,再進行時序控制電路的復位并對所有計數器進行清零操作。隨后單片機不斷查詢測量完成信號。當時序控制電路在雷達觸發脈沖的作用下完成一次測量時?熏就通過該信號通知單片機,單片機一旦查詢到測量完成便立即讀入測量結果。然后進行分析,是標準中頻頻率時不進行本振頻率的調整,直接準備下一脈沖周期的測量,若不是則計算所需的頻率調整量,控制DDS頻率合成模塊進行頻率調整,然后再準備下一脈沖周期的測量。
搜索和跟蹤過程的區別主要在于計算頻率調整量的方法不同,其它流程基本一致。
基于DDS技術的自適應米波雷達本振自動頻率控制系統集DDS技術的先進性、全數字脈內頻率測量的實時性和單片機軟件可編程的靈活性于一體,實現了對每一個發射脈沖的發射頻率的實時測量和跟蹤,是一種全新的雷達自動頻率控制系統。在研制過程中解決了高速全數字頻率測量模塊的設計與實現、高穩定度高頻譜純度頻率合成等技術難題;同時由于雷達發射機沒有單獨組艙,發射信號的場強很大,對系統的抗干擾能力提出了很高的要求,在技術上采取了精心設計印刷電路板、嚴格區分模擬地和數字地以及嚴格的屏蔽等措施,整個系統具有跟蹤精度高、跟蹤范圍大、速度快、工作穩(接上頁)
定可靠的優點。該系統結構簡單、體積小、成本低,在國產某型雷達上已經成功使用,顯著提高了該型雷達的技術、戰術性能。
- 控制系統(108281)


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。 舉報投訴
相關推薦
77G毫米波雷達在 ADAS 功能和 AD 自動駕駛中的角色和功能
自適應數字傳感器設計
自適應逆變電源的設計與實現
ADAS系統無人駕駛的眼睛毫米波雷達
Ameya360 汽車雷達系統解決方案
CMOS技術實現的微型化毫米波傳感器
MRAS無速度傳感器矢量控制系統
PSoC怎么設計一個倒車雷達控制系統?
[下載]交直流傳動系統的自適應控制
一種基于DDS器件AD9951的射頻正弦波信號發生器設計
一種基于DDS器件AD9951的射頻正弦波信號發生器設計
一種永磁同步電機模糊自整定自適應積分反步控制方法
兩關節機械手的自適應控制介紹
雙向同步自適應時鐘技術
變步長LMS自適應濾波算法及其分析
在電機DSP控制系統中怎么實現離散模型參考自適應算法?
基于AccelDSP的自適應濾波器設計
基于紅外攝像技術的自適應遠光燈控制系統
如何利用毫米波雷達和圖像傳感器構建智能駕駛控制系統?
怎么設計嵌入式系統的自適應前照燈系統?
無線傳感器網絡的自適應交通燈控制系統
毫米波技術基礎
毫米波雷達VS激光雷達VS超聲波雷達
毫米波雷達工作原理,雷達感應模塊技術,有什么優勢呢?
毫米波雷達感知技術搭建車路協同系統的可行性
毫米波雷達方案對比
毫米波雷達模組,智能家居雷達感應技術,存在感應雷達方案
毫米波雷達(一)
毫米雷達波概述
汽車安全解決方案/雷達傳感器
汽車防眩目自適應遠光燈系統有哪些核心技術優勢?
淺析車載毫米波雷達
漫談車載毫米波雷達歷史
激光雷達在無人駕駛技術中的應用解析
車載毫米波雷達的技術原理與發展
高級輔助駕駛ADAS技術
基于自適應逆控制實現的直流調速系統
 24
24魯棒自適應控制綜述A survey of robust ad
40DCS自適應智能控制在步進梁加熱爐燃燒控制系統中應用
45自適應配料控制系統在水泥磨料過程中的應用The Applic
12自適應配料控制系統在水泥磨料過程中的應用The Applic
14基于MATLAB的時變系統自適應控制的仿真
36基于WinFACT的模糊控制系統設計
8新型自適應速度觀測器在異步電機直接轉矩控制系統中的應用
22自適應控制在網絡化控制系統中的應用
13基于LabVIEW和Simulink的自適應控制
52基于自適應模糊PID控制器的溫度控制系統
39基于多模型自適應控制器的感應電機變頻調速系統
24網絡控制系統的模糊自適應PID控制
8基于自適應模糊PID控制器的溫度控制系統
72參數自適應模糊PID控制器的設計
 2223
2223
自適應前照燈控制系統(AFS)原理介紹
2735時變非線性系統的自適應逆控制仿真
30一種L1自適應控制方法設計陣風減緩控制系統設計
15短波頻率自適應通信技術解析
13500詳細剖析ACC自適應巡航系統
30472基于分層模糊系統的自適應H∞控制器設計
0基于自適應動態規劃的SVC自適應優化控制策略
19自適應模糊神經網絡的交通燈控制系統的設計
2747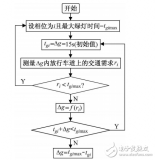
無線傳感器網絡的自適應交通燈控制系統
2617
什么是自適應控制_自適應控制基本原理
54586自適應控制的優缺點_自適應控制存在的問題及發展
46896以PIC單片機為核心微機控制系統的步進電機自適應控制技術研究
1005
自適應巡航是什么
34472Traxen推出智能自適應巡航控制系統iQ-Cruise
1944機載雷達空時自適應處理技術的研究資料說明
0神經網絡自適應控制及其發展應用
11何謂自適應前照燈控制系統?其有何功能?
5107
自適應前照燈控制系統
635
機載雷達空時自適應處理技術
694
自適應巡航系統的組成及原理
458
毫米波雷達的自適應波束成形技術:提升感知精度的前沿探索
196- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網絡
- 醫療電子
- 人工智能
- 虛擬現實
- 可穿戴設備
- 機器人
- 安全設備/系統
- 軍用/航空電子
- 移動通信
- 工業控制
- 便攜設備
- 觸控感測
- 物聯網
- 智能電網
- 區塊鏈
- 新科技
- 聯系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發燒友APP

-
電子發燒友觀察



{kind=link}
版權所有 ? 深圳華秋電子有限公司
電子發燒友 (電路圖) 粵公網安備 44030402000349 號 電信與信息服務業務經營許可證:合字B2-20210191 工商網監
湘ICP備 2023018690 號
工商網監
湘ICP備 2023018690 號
評論