 電子發燒友App
電子發燒友App


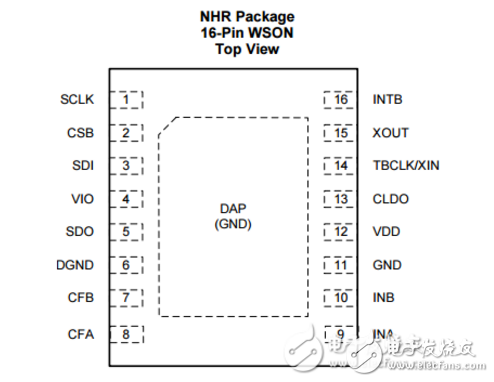
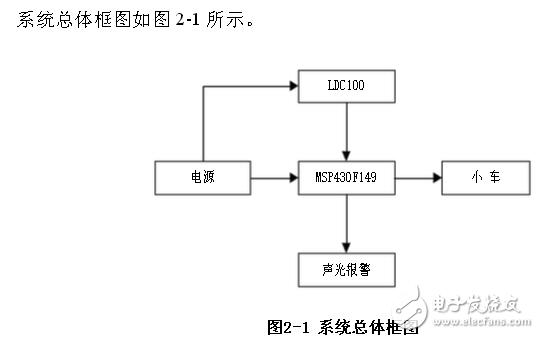
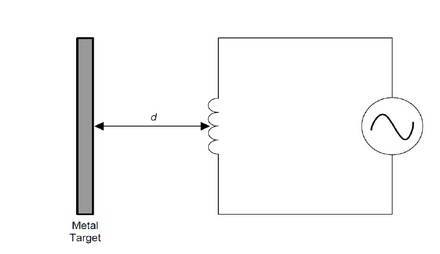
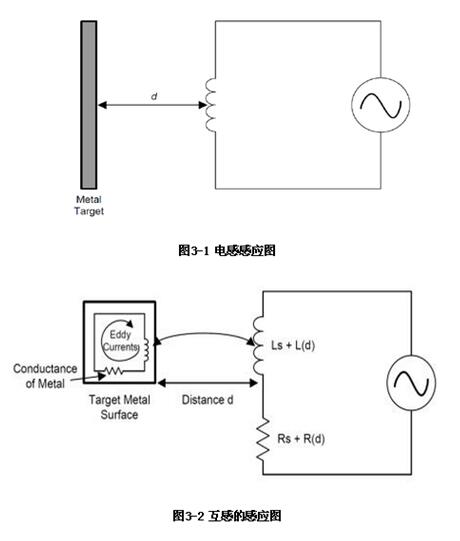
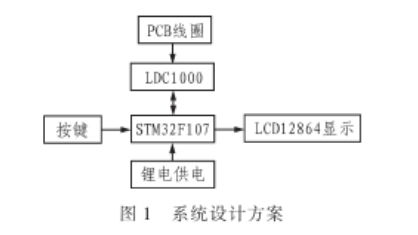
LDC1000是一款非接觸式、短程傳感的電感檢測傳感器芯片,能夠將模擬電感值轉換為數值量,同時具有低成本、高分辨率遙感的導電性。它的內置處理芯片具有SPI通信接口,能夠很方便地與單片機進行通信。LDC1000只需要外接一個PCB線圈或者自制線圈就可以實現非接觸電感檢測,測試外部金屬物體和 LDC相連的測試線圈的空間位置關系。利用這個特性配以外部設計的金屬物體, 傳感器內部會產生一個交變電流,加在PCB線圈或者自制線圈上,線圈周圍會產生交變電磁場,這時如果有金屬物體進入這個電磁場,則會在金屬物體表面產生渦流(感應電流)。由于渦流電流跟線圈電流方向相反,因此渦流產生的感應電磁場跟線圈的電磁場方向相反。渦流是金屬物體的距離,大小、成分的函數。渦流產生的反向磁場與線圈耦合在一起,就像是有另一個次級線圈存在一樣。LDC1000的線圈作為初級線圈,渦流效應作為次級線圈,這樣就形成了一個變壓器。由于變壓器的互感作用,在初級線圈這一側就可以檢測到次級線圈的參數。
附上一例LDC1000的應用程序例子僅供參考!
/*****************************************************************************************************
* @brief: LDC1000應用程序
* _____________ _______________
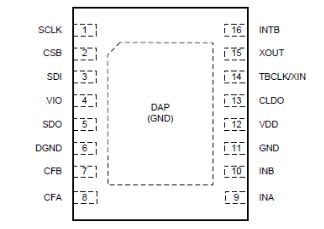
* |PB4(SSI2CLK) ----》 SCLK|
* |PB5(SSI2FSS) ----》 CSB |
* |PB6(SSI2RX) 《---- SDO |
* Tiva M4 |PB7(SSI2TX) ----》 SDI | LDC1000
* |PA4(INT/GPIO) 《---- INTB|
* |PB0(Timer CLK) ----》 TBCLK|
* _____________| |______________
*****************************************************************************************************/
#include 《stdint.h》
#include 《stdbool.h》
#include “driverlib/rom.h”
#include “driverlib/adc.h”
#include “driverlib/sysctl.h”
#include “driverlib/pwm.h”
#include “driverlib/timer.h”
#include “driverlib/gpio.h”
#include “driverlib/pin_map.h”
#include “driverlib/interrupt.h”
#include “driverlib/ssi.h”
#include “inc/hw_ints.h”
#include “inc/hw_memmap.h”
#include “inc/hw_gpio.h”
#include “LDC1000_cmd.h”
#include “inc/hw_timer.h”
#include “inc/hw_types.h”
#include “inc/hw_ssi.h”
#ifndef TARGET_IS_BLIZZARD_RA1
#define TARGET_IS_BLIZZARD_RA1
#endif
#ifndef PART_TM4C123GH6PM
#define PART_TM4C123GH6PM
#endif
#define SPI_RWBIT 0x80 //LDC1000,SPI時序讀寫位,1=讀,0=寫
unsigned long ProximityData; //LDC上Proximity Data
unsigned long FrequencyData; //LDC1000上的Frequency Data
volatile unsigned char DataRdy ; //LDC1000中斷標志
uint32_t DataRcv[5] ; //存儲SPI讀取的數據
/********************************************************************
* @brief: SPI寫數據
* @param: unsigned int,SPIdata:待寫的數據
* @return: none
*********************************************************************/
void SPIDataSend(unsigned int SPIdata)
{
SSIDataPut(SSI2_BASE,SPIdata); //SPI發送(寫)數據
while(SSIBusy(SSI2_BASE)) ; //等待SPI發送(寫)完成
}
/********************************************************************
* @brief: LDC1000初始化配置,ps:在SPI中配置了數據位16個數據長度,故
* 在發送數據時可以將地址和值進行或運算一起發送出去
* @param: none
* @return: none
*********************************************************************/
void LDC1000_init()
{
SPIDataSend(LDC1000_CMD_RPMAX《《8|TEST_RPMAX_INIT); //配置Rp_MAX(0x01)寄存器
SPIDataSend(LDC1000_CMD_RPMIN《《8|TEST_RPMIN_INIT); //配置Rp_MIN(0x02)寄存器
SPIDataSend(LDC1000_CMD_SENSORFREQ《《8|0x94); //配置Sensor Frequency(0x03)寄存器
SPIDataSend(LDC1000_CMD_LDCCONFIG《《8|0x17); //配置LDC Configuration(0x04)寄存器
SPIDataSend(LDC1000_CMD_CLKCONFIG《《8|0x00); //配置Clock Configuration(0x05)寄存器,
//使用TBCLK作為時鐘源
SPIDataSend(LDC1000_CMD_INTCONFIG《《8|0x02); //配置INTB Pin Configuration(0x0A),
//配置INTB為比較輸出標志位(status of Comparator output)
SPIDataSend(LDC1000_CMD_THRESHILSB《《8|0x50); //配置Comparator Threshold High(0x06)寄存器低8位
SPIDataSend(LDC1000_CMD_THRESHIMSB《《8|0x14); //配置Comparator Threshold High(0x07)寄存器高8位
SPIDataSend(LDC1000_CMD_THRESLOLSB《《8|0xC0); //配置Comparator Threshold Low(0x08)寄存器低8位
SPIDataSend(LDC1000_CMD_THRESLOMSB《《8|0x12); //配置Comparator Threshold Low(0x09)寄存器高8位
SPIDataSend(LDC1000_CMD_PWRCONFIG《《8|0x01); //配置Power Configuration(0x0B)寄存器,
//為Active Mode,使能轉化
}
/********************************************************************
* @brief: 使用SPI讀取LDC1000中的數據
* @param: none
* @return: none
*********************************************************************/
void LDCRead()
{
SPIDataSend((LDC1000_CMD_PROXLSB|SPI_RWBIT)《《8); //寫入將要讀取的Proximity Data LSB寄存器地址(0x21)
SSIDataGet(SSI2_BASE,&DataRcv[0]); //讀取上述寄存器中的值,并存入DataRcv[0]
ProximityData|= DataRcv[0] ;
SPIDataSend((LDC1000_CMD_PROXMSB|SPI_RWBIT)《《8); //寫入將要讀取的Proximity Data MSB寄存器地址(0x22)
SSIDataGet(SSI2_BASE,&DataRcv[1]); //讀取上述寄存器中的值,并存入DataRcv[1]
ProximityData|= (DataRcv[1]《《8) ; //組合成ProximityData
SPIDataSend((LDC1000_CMD_FREQCTRLSB|SPI_RWBIT)《《8); //寫入將要讀取的Frequency Counter Data LSB寄存器地址(0x23)
SSIDataGet(SSI2_BASE,&DataRcv[2]); //讀取上述寄存器中的值,并存入DataRcv[2]
FrequencyData|= DataRcv[2] ;
SPIDataSend((LDC1000_CMD_FREQCTRMID|SPI_RWBIT)《《8); //寫入將要讀取的Frequency Counter Data Mid-Byte寄存器地址(0x24)
SSIDataGet(SSI2_BASE,&DataRcv[3]); //讀取上述寄存器中的值,并存入DataRcv[3]
FrequencyData|= (DataRcv[3]《《8) ;
SPIDataSend((LDC1000_CMD_FREQCTRMSB|SPI_RWBIT)《《8); //寫入將要讀取的Frequency Counter Data MSB寄存器地址(0x25)
SSIDataGet(SSI2_BASE,&DataRcv[4]); //讀取上述寄存器中的值,并存入DataRcv[4]
FrequencyData|= (DataRcv[4]《《16) ; //組合成FrequencyData
GPIOIntEnable(GPIO_PORTA_BASE,GPIO_INT_PIN_4); //使能PA4中斷
}
/********************************************************************
* @brief: Timer初始化
* @param: none
* @return: none
* _____________ _______________
* | |
* Tiva M4 |PB0(Timer CLK) ----》 TBCLK| LDC1000
* _____________| |______________
*********************************************************************/
void TimerInit()
{
TimerDisable(TIMER2_BASE,TIMER_A);
GPIOPinTypeTimer(GPIO_PORTB_BASE,GPIO_PIN_0);
GPIOPinConfigure(GPIO_PB0_T2CCP0); //配置PB0為CCP模式
HWREG(TIMER2_BASE + TIMER_O_CFG) = 0x04; //選擇16-bit timer
//配置TimerA周期計數(Periodic Timer mode)
HWREG(TIMER2_BASE + TIMER_O_TAMR)|=(TIMER_TAMR_TAAMS|TIMER_TAMR_TAMR_PERIOD) ;
//加載Timer計數值:40,并且設置Match值:20(Timer默認為減計數)
HWREG(TIMER2_BASE + TIMER_O_TAMATCHR) = 20;
TimerLoadSet(TIMER2_BASE,TIMER_A,40);
TimerEnable(TIMER2_BASE,TIMER_A); //使能Timer
}
/********************************************************************
* @brief: PA4初始化
* @param: none
* @return: none
* _________ ___________
* | |
* | |
* Tiva M4 | PA4 《--- INTB| LDC1000
* | |
* —————————| |__________
*********************************************************************/
void GPIOInit()
{
HWREG(GPIO_PORTA_BASE + GPIO_O_DEN) |= 1《《4 ;
GPIOIntTypeSet(GPIO_PORTA_BASE,GPIO_PIN_4,GPIO_RISING_EDGE); //配置為上升沿中斷
GPIOIntEnable(GPIO_PORTA_BASE,GPIO_INT_PIN_4); //使能PA4中斷
IntEnable(INT_GPIOA); //使能GPIOA中斷
}
/********************************************************************
* @brief: SPI通信初始化
* @param: none
* @return: none
* _____________ _______________
* |PB4(SSI2CLK) ----》 SCLK|
* |PB5(SSI2FSS) ----》 CSB |
* |PB6(SSI2RX) 《---- SDO |
* Tiva M4 |PB7(SSI2TX) ----》 SDI | LDC1000
* |PB0(Timer CLK) ----》 TBCLK|
* _____________| |______________
*********************************************************************/
void SPIInit()
{
//配置PB6為SSI2RX,即對Tiva M4而言的SPI數據接收線
GPIOPinTypeSSI(GPIO_PORTB_BASE,GPIO_PIN_6) ;
GPIOPinConfigure(GPIO_PB6_SSI2RX);
//配置PB6為SSI2TX,即對Tiva M4而言的SPI數據發送線
GPIOPinTypeSSI(GPIO_PORTB_BASE,GPIO_PIN_7) ;
GPIOPinConfigure(GPIO_PB7_SSI2TX);
//配置PB4為SSI2CLK線,作為時鐘線
GPIOPinTypeSSI(GPIO_PORTB_BASE,GPIO_PIN_4) ;
GPIOPinConfigure(GPIO_PB4_SSI2CLK);
//配置PB5為SSI2FFS線,作為片選線
GPIOPinTypeSSI(GPIO_PORTB_BASE,GPIO_PIN_5) ;
GPIOPinConfigure(GPIO_PB5_SSI2FSS);
SSIDisable(SSI2_BASE); //禁能SSI2
//配置SSI2為SSI_FRF_MOTO_MODE_0協議格式,SPI主模式,時鐘源為5K,16位數據長度
SSIConfigSetExpClk(SSI2_BASE,SysCtlClockGet(),SSI_FRF_MOTO_MODE_0,SSI_MODE_MASTER,5000,16);
SSIEnable(SSI2_BASE) ; //使能SSI2
}
/********************************************************************
* @brief: PA4中斷服務函數,該函數在startup_ccs.c的中斷向量表中進行
* 了注冊
* @param: none
* @return: none
* _________ ___________
* | |
* | |
* Tiva M4 | PA4 《--- INTB| LDC1000
* | |
* —————————| |__________
*********************************************************************/
void GPIOAIntHandler()
{
GPIOIntClear(GPIO_PORTA_BASE,GPIO_INT_PIN_4) ; //清除PA4中斷標志
DataRdy = 1 ; //LDC1000中斷標志置位
GPIOIntDisable(GPIO_PORTA_BASE,GPIO_INT_PIN_4) ; //禁能PA4中斷,將在SPI數據讀取完成后重新使能PA4中斷
}
//---------------------------------------main函數----------------------------------------------
int main(void)
{
SysCtlClockSet(SYSCTL_SYSDIV_4 | SYSCTL_USE_PLL | SYSCTL_XTAL_16MHZ | //配置主時鐘為50MHz
SYSCTL_OSC_MAIN);
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOA) ; //使能GPIOA外設模塊
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOB) ; //使能GPIOB外設模塊
SysCtlPeripheralEnable(SYSCTL_PERIPH_TIMER2); //使能Timer2外設模塊
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI2); //使能SSI2外設模塊
DataRdy = 0 ; //LDC1000中斷標志清零
TimerInit() ; //TBCLK所在時鐘初始化
GPIOInit() ; //GPIO初始化(PA4)
SPIInit() ; //SPI初始化
LDC1000_init(); //LDC1000初始配置
ROM_IntMasterEnable(); //使能總中斷
while(HWREG(SSI2_BASE + SSI_O_SR)& SSI_SR_RNE) //首先清除SPI上的接收緩存,排除干擾
{
DataRcv[0] = HWREG(SSI2_BASE + SSI_O_DR) ;
}
while(1)
{
//轉化結束后讀取ProximityData和FrequencyData
if(DataRdy)
{
DataRdy = 0 ; //LDC1000中斷標志清零(在PA4中斷服務程序中置位)
LDCRead() ; //SPI讀取數據操作
}
}
}











 工商網監
工商網監
評論