在本文中,我們使用ADI的IMU ADIS16470和地磁傳感器來開發(fā)平臺和算法,實(shí)現(xiàn)捷聯(lián)慣性導(dǎo)航系統(tǒng)。但是,地磁傳感器只能提供姿態(tài)信息。對于航位推算或距離測量,我們只能使用IMU中的 加速度傳感器。
2020-04-18 10:58:47 2924
2924 
假設(shè)已經(jīng)實(shí)現(xiàn)了電機(jī)控制,后續(xù)的電機(jī)標(biāo)定大抵上分成兩類,一類是效率標(biāo)定,一類是外特性標(biāo)定。前者目標(biāo)是以提升在各工況下的系統(tǒng)效率。假設(shè)你了解交直軸變換,那么效率標(biāo)定的目標(biāo),就是通過調(diào)整交直軸電流,在不同的轉(zhuǎn)速條件下,以更高的效率來實(shí)現(xiàn)扭矩。這個過程就是不斷調(diào)整你的交直軸電流(對于異步機(jī)還得調(diào)整轉(zhuǎn)差率);
2023-08-04 10:26:182240 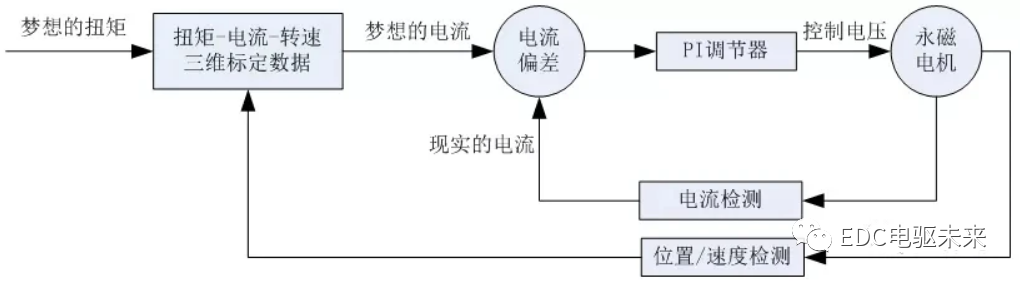
貿(mào)澤電子 即日起備貨Bosch的BMI270 智能慣性測量單元 (IMU)。
2019-08-28 15:36:561691 上一期中挑選了國外三家知名的IMU廠商的主流IMU產(chǎn)品進(jìn)行盤點(diǎn)分析。可以看到,國外主流的IMU廠商都在精度和低耗上下足了功夫,同時都在發(fā)力向高端IMU市場進(jìn)軍推出解決方案。這一期我們將視線轉(zhuǎn)回國內(nèi),來看看國內(nèi)MEMS廠商旗下產(chǎn)品。
2021-09-04 08:00:004812 單元IMU和垂直測量單元VRU產(chǎn)品特點(diǎn):慣性測量單元垂直陀螺陀螺儀零偏穩(wěn)定性8°/hr加速度計零偏穩(wěn)定性0.04mg垂直陀螺儀算法,姿態(tài)精度±0.25°集成高精度壓力計相比于3DM-GX3-25航姿參考系統(tǒng),3DM-GX3-15缺少了一個三軸磁力計。姿態(tài)角當(dāng)中的橫滾和傾斜精度±0.25,航向沒有參考。
2020-12-07 09:05:45
提供準(zhǔn)確的姿態(tài)測量和姿態(tài)控制。協(xié)同RTK、PPK等精確定位設(shè)備實(shí)現(xiàn)AGV等人工智能設(shè)備的精確定位。也可以同LIDAR、雷達(dá)等設(shè)備通過人工智能算法融合,實(shí)現(xiàn)多功能準(zhǔn)確導(dǎo)航。工業(yè)級慣導(dǎo)3DM-GX5系列
2020-12-16 14:18:35
\omegakω?,c ω c_\omegacω?分別表示加速度計與陀螺儀的溫漂系數(shù)。三、IMU標(biāo)定在SLAM領(lǐng)域中,單純的視覺傳感器在現(xiàn)階段無法通過計算機(jī)視覺完成精確的位姿計算,一般采用imu作為補(bǔ)充,進(jìn)行多
2020-12-24 15:56:31
EVALBOARDFORADIS16IMU4
2023-03-30 12:04:37
Labview-多項(xiàng)式標(biāo)定算法
2015-08-19 12:23:39
labview進(jìn)行物體測量如何使用標(biāo)定塊進(jìn)行標(biāo)定?
2019-08-04 12:18:01
的傳感器。這些信息可以用于計算載體的位置、速度和方向,從而實(shí)現(xiàn)慣性導(dǎo)航、姿態(tài)控制、動態(tài)監(jiān)測等功能。IMU通常由三個方向的加速度計和三個方向的陀螺儀組成,可以測量載體在三個方向上的加速度和角速度。
而在機(jī)器人
2023-12-13 15:48:08
雙目視覺的原理:由于視差原理,左右兩個ccd的位置固定,若能測量空間中同一個點(diǎn)P在左右兩個ccd中圖像的位置,則根據(jù)三角原理,可以求得P點(diǎn)在空間中的坐標(biāo)位置。可用于攝像頭實(shí)現(xiàn)空間點(diǎn)的距離測量。下圖
2021-09-27 16:52:18
本帖翻譯自IMU(加速度計和陀螺儀設(shè)備)在嵌入式應(yīng)用中使用的指南。這篇文章主要介紹加速度計和陀螺儀的數(shù)學(xué)模型和基本算法,以及如何融合這兩者,側(cè)重算法、思想的討論介紹本指南旨在向興趣者介紹慣性MEMS(微機(jī)電系統(tǒng))傳感器,特別是加速度計和陀螺儀以及其他整合IMU(慣性測量
2021-08-09 06:46:21
處理器讀取陀螺儀加速度計數(shù)據(jù)后首先需要對數(shù)據(jù)進(jìn)行濾波處理,此文分析比較幾種常用的濾波算法。IMU: IMU使用MPU9250(即MPU6500),設(shè)置加速度量程±8G,陀螺儀±2000dps,數(shù)字低
2019-06-11 08:00:00
***協(xié)議是什么?基于***協(xié)議的汽車ECU標(biāo)定系統(tǒng)該如何去實(shí)現(xiàn)?
2021-05-12 06:33:24
、標(biāo)定精度也不夠理想。基于模型的電機(jī)標(biāo)定方法,魯棒性強(qiáng),測試點(diǎn)少,提高測試效率,將MTPA和弱磁放在一張表格中標(biāo)定,可同時實(shí)現(xiàn)基速以下以及高速弱磁區(qū)效率最優(yōu)控制,采用GUI,易操作,弱化電機(jī)背景知識。通...
2021-08-27 06:01:41
如何使用imu_utils工具生成IMU的Allan方差標(biāo)定曲線?
2021-11-22 07:23:12
求指教如何使用labview實(shí)現(xiàn)手眼標(biāo)定謝謝
2019-04-22 18:24:28
基于***協(xié)議的汽車ECU標(biāo)定系統(tǒng)DAQ模式的實(shí)現(xiàn)
2021-05-12 06:20:57
我們在我們的芯片組/PCB 中使用 ST IMU LSM6DSL。我們正在尋找現(xiàn)成的軟件或算法來實(shí)施到我們的固件中,以確定來自 IMU 數(shù)據(jù)的速度/加速度和距離。有沒有可以分享的示例代碼?
2023-01-06 06:14:50
無錫瑞吉星電子的RJX-IMU-164系列;
參數(shù)如下:
一 、概述
RJX-IMU-16460高精度慣性測量單元是一款小型高精度MEMS慣性測量單元,可與ADIS-16460實(shí)現(xiàn)原位插拔替換、內(nèi)部
2024-01-18 13:46:16
機(jī)器視覺系統(tǒng)環(huán)境下所采集到的圖像,配合專業(yè)的標(biāo)定算法來實(shí)現(xiàn)這一過程,系統(tǒng)可以精確得出視野范圍內(nèi)的任意位置上的誤差數(shù)值,并據(jù)此誤差數(shù)據(jù)評估機(jī)器視覺系統(tǒng)的精度等級;2、誤差圖像的校正與補(bǔ)償,標(biāo)定系統(tǒng)根據(jù)
2022-02-25 09:55:55
接下來我們具體的看看溫度變送器的標(biāo)定方法吧。 由于自然環(huán)境下溫度始終是一個緩變的物理量,所以一般情況下對溫度傳感器的檢定是屬于靜態(tài)的,這也能滿足絕大部分溫度傳感器的實(shí)際需要。動態(tài)的檢定極少,能實(shí)現(xiàn)
2016-01-11 16:39:59
最近在一直研究四軸的一些東西,不過聽到學(xué)長說四軸用IMU算法比較好,所以我想問一下IMU 和AHRS算法用stm32如何實(shí)現(xiàn)呢?他們的區(qū)別是什么?哪個更好一些呢???求各位i解答!!
2019-04-19 06:36:22
大家好,向請教一個關(guān)于labview標(biāo)定的問題。如圖所示,使用labview標(biāo)定測試距離,實(shí)際距離應(yīng)該為96mm但是標(biāo)定后用vision assistant測量的距離是95.41mm測量誤差都接近
2018-11-10 11:21:32
有個項(xiàng)目要用視覺定位,視覺拍好產(chǎn)品之后,把產(chǎn)品的坐標(biāo)發(fā)送到PLC,PLC再執(zhí)行定位指令。現(xiàn)在查到的資料都沒有涉及這一塊,都是講相機(jī)標(biāo)定,而不是手眼標(biāo)定。哪位有這方面的資料,怎么用labview實(shí)現(xiàn)手眼標(biāo)定?
2020-05-28 14:42:35
在IMU傳感器上進(jìn)行艾倫方差所需的通常測量時間/數(shù)據(jù)點(diǎn)是多少?
2022-12-07 07:57:19
數(shù)字圖像處理原理是什么?簡單Ferret算法原理是什么?改進(jìn)的Ferret算法原理有哪些步驟?改進(jìn)的Ferret算法和目前常用的測量算法有哪些不同?
2021-04-15 06:58:37
運(yùn)動狀態(tài)的路徑設(shè)計對待標(biāo)定的誤差項(xiàng)進(jìn)行有效激勵。仿真卡爾曼濾波結(jié)果表明,該算法使得待標(biāo)定的各誤差項(xiàng)根據(jù)車行軌跡在較短的時間內(nèi)逐步收斂,實(shí)現(xiàn)在一般跑車實(shí)驗(yàn)中不拆卸慣性器件而達(dá)到標(biāo)定的目的。這種在線標(biāo)定
2010-04-24 09:31:29
在壓力傳感器自動標(biāo)定系統(tǒng)中,自動采樣算法是系統(tǒng)的重要組成部分,通過建立自動采樣算法是數(shù)學(xué)模型,提高了采樣的精度。通過軟件編程應(yīng)用于壓力傳感器自動標(biāo)定系統(tǒng)中。
2009-06-25 09:06:06 22
22 簡要論述了為延長慣性測量組合的穩(wěn)定期以及提高慣性測量組合的使用精度,在位置轉(zhuǎn)臺上對慣性測量組合影響精度大的不穩(wěn)定參數(shù)進(jìn)行自標(biāo)定的技術(shù),即利用角速度計去標(biāo)定低精
2009-07-16 09:44:5817 使用MATLAB實(shí)現(xiàn)了一種簡便的攝象機(jī)參數(shù)的標(biāo)定方法。先由四個標(biāo)定點(diǎn)的坐標(biāo)計算出透視投影矩陣,從而計算出標(biāo)定模板上其它節(jié)點(diǎn)的圖象坐標(biāo),之后進(jìn)行內(nèi)部參數(shù)和外部參數(shù)的計算
2009-09-03 12:07:5825 無線傳感器網(wǎng)絡(luò)是一個多學(xué)科交叉的新興前沿技術(shù)研究領(lǐng)域。它在環(huán)境檢測、遙感、目標(biāo)定位等領(lǐng)域具有廣泛的應(yīng)用。本文對目前幾種主要的目標(biāo)定位算法進(jìn)行了分析,并對基于
2009-12-16 14:31:4818 本文設(shè)計了一種基于雙口ram的通用標(biāo)定系統(tǒng)。提出標(biāo)定裝置與電控單元分離的標(biāo)定系統(tǒng)硬件體系結(jié)構(gòu),將標(biāo)定裝置作為標(biāo)定軟件和電子控制單元的中間層,解決了標(biāo)定系統(tǒng)與電控
2009-12-18 15:57:4018 從工程實(shí)用和維護(hù)的角度出發(fā),提出一種針對于車載組合導(dǎo)航系統(tǒng)的在線標(biāo)定算法。該算法使用卡爾曼濾波作為估計工具,通過趨于一般運(yùn)動狀態(tài)的路徑設(shè)計對待標(biāo)定的誤差項(xiàng)
2010-02-11 12:11:5411 為了實(shí)現(xiàn)復(fù)雜的運(yùn)動與導(dǎo)航控制,需獲取控制對象的空間姿態(tài)信息,設(shè)計了基于四自由度(4DoF)IMU慣性測量傳感器和C8051F330單片機(jī)的姿態(tài)測量系統(tǒng)。介紹了ADIS16300慣性測量傳感器的
2010-07-21 15:25:1123 泛華測控推出ECU測量與標(biāo)定軟件----CALAB
近期,由北京中科泛華測控技術(shù)有限公司(簡稱:泛華測控)設(shè)計并開發(fā)的ECU測量與標(biāo)定軟件—CALAB(全稱:Calibration Laborat
2009-11-24 13:30:54571 針對自標(biāo)定加速度計組合動基座試驗(yàn)數(shù)據(jù)中存在的數(shù)據(jù)異常問題,推導(dǎo)并運(yùn)用自適應(yīng)Kalman濾波算法剔除異常數(shù)據(jù),通過對不同Kalman濾波算法自標(biāo)定精度解算結(jié)果的均值和標(biāo)準(zhǔn)差進(jìn)行比較
2011-04-12 17:08:510 針對傳統(tǒng)的IMU信號采集系統(tǒng)尺寸大、成本高和集成度低等不足,介紹了以DSP為核心的集成式IMU信號采集系統(tǒng)的解決方案,詳細(xì)闡述了系統(tǒng)硬件實(shí)現(xiàn)方案和軟件實(shí)時誤差校正算法。該系統(tǒng)具
2011-05-18 16:55:4236 以簡化以往的攝像機(jī)標(biāo)定技術(shù)為研究目的,分析了標(biāo)定算法對于前期圖像處理的要求,給出了基于MATLAB 的簡易 攝像機(jī) 標(biāo)定方法。該方法借助于常用軟件完成了以往攝像機(jī)的標(biāo)定算法中的
2011-06-13 15:52:4039 采用直線對應(yīng)法和基于最小二乘的標(biāo)定方法對攝像機(jī)和光刀進(jìn)行標(biāo)定,設(shè)計并實(shí)現(xiàn)了三維掃描儀系統(tǒng)的標(biāo)定,經(jīng)試驗(yàn)表明,此方法簡單易行,計算結(jié)果精度高,對數(shù)據(jù)測量的精確性和可
2011-10-10 10:38:4818 提出了基于平面單應(yīng)性矩陣的攝像機(jī)標(biāo)定算法,通過攝像機(jī)標(biāo)定對檢測區(qū)域進(jìn)行網(wǎng)格劃分,從而進(jìn)行車輛速度的檢測。經(jīng)實(shí)驗(yàn)測試,該方法易于實(shí)現(xiàn),且具有較高的檢測精度,平均測速準(zhǔn)確率
2011-11-10 14:35:3651 MEMS慣性測量單元自動校準(zhǔn)算法研究與實(shí)現(xiàn)
2015-11-25 10:22:4919 對于在反饋環(huán)路中采用MEMS慣性測量單元(IMU)的高性能運(yùn)動控制系統(tǒng),傳感器對準(zhǔn)誤差常常是其關(guān)鍵考慮之一。
2016-11-05 03:56:253578 
三維腳型測量中的標(biāo)定及輪廓圖像處理技術(shù)_劉瓊
2017-03-14 08:00:000 FIS1100IMU集成了專有的AttitudeEngine運(yùn)動處理器和九軸傳感器融合算法,將處理功率降低至原來的十分之一,是具有完整制定定位精度的消費(fèi)電子IMU。Xsens提供傳感器融合和系統(tǒng)級的整體解決方案。20億件目標(biāo)市場,跨越多個細(xì)分應(yīng)用市場。廣泛應(yīng)用于支持運(yùn)動、采用電池供電的應(yīng)用中。
2017-09-12 17:20:1018 在三維視覺測量系統(tǒng)中,對儀器參數(shù)的標(biāo)定是首先需要解決的難題,而對投影儀的內(nèi)外參數(shù)標(biāo)定是三維結(jié)構(gòu)光測量系統(tǒng)中不可或缺的一部分。就目前而言,投影儀的參數(shù)標(biāo)定還存在著標(biāo)定精度偏低、方法單一、可操作性差等
2017-11-06 15:30:2120 量熱儀在測量煤炭發(fā)熱量時,熱容量的標(biāo)定工作是不容忽視的,其可以幫助我們檢驗(yàn)量熱儀的測量是否精確,便于提高實(shí)驗(yàn)結(jié)果的準(zhǔn)確性。
2017-11-29 15:41:592795 針對張正友標(biāo)定方法中相機(jī)內(nèi)參數(shù)的求解可能陷入局部最優(yōu)解的問題,考慮鏡頭的三階徑向畸變和二階離心畸變,提出一種基于改進(jìn)遺傳算法的單目相機(jī)內(nèi)參數(shù)優(yōu)化標(biāo)定方案。該方法可顯著提高相機(jī)標(biāo)定中內(nèi)參數(shù)的精度,并能避免陷入局部最優(yōu)。最后,實(shí)驗(yàn)驗(yàn)證了所提方案的有效性和可行性。
2018-01-05 16:11:491 圖像測量技術(shù)在工業(yè)現(xiàn)場的應(yīng)用日益廣泛,已成為產(chǎn)品幾何尺寸測量的重要方法,但光學(xué)鏡頭的徑向畸變對測量結(jié)構(gòu)有著很大的影響,本文著重介紹利用LABVIEW開發(fā)平臺下的vision組件對測量圖像進(jìn)行標(biāo)定
2018-02-23 10:00:4176 針對地面勻速運(yùn)動目標(biāo)定位問題,在校正源存在條件下提出基于雙星時頻差序列觀測量的定位算法。首先在衛(wèi)星星歷存在誤差條件下,推導(dǎo)基于雙星時頻差序列觀測量的差分校正定位公式及其理論性能,數(shù)學(xué)分析表明盡管
2018-03-07 16:04:520 傳統(tǒng)的雙雷達(dá)地面目標(biāo)定位算法因測量數(shù)據(jù)本身固有的誤差和量測噪聲,使得基于非線性估計定位算法的定位精度不高。本文研究了一種新的雙雷達(dá)地面目標(biāo)定位算法,該算法將已知雷達(dá)探測數(shù)據(jù)以幾何方式加以表示,通過
2018-03-13 14:09:443 我們所說的慣性測量單元(IMU)包含了三個單軸的加速度計和三個單軸的陀螺,加速度計檢測物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度信號,而陀螺檢測載體相對于導(dǎo)航坐標(biāo)系的角速度信號,測量物體在三維空間中的角速度
2018-04-27 16:33:471885 今天為大家介紹一項(xiàng)國家發(fā)明授權(quán)專利——壓力分布傳感器標(biāo)定測量裝置。該專利由安徽埃力智能科技有限公司申請,并于2017年1月25日獲得授權(quán)公告。
2018-09-29 09:37:003581 的確定性標(biāo)定方法會導(dǎo)致大量局部最優(yōu)值的出現(xiàn)。在此基礎(chǔ)上,本文提出了基于交叉熵算法的跟馳模型標(biāo)定的框架,基于蒙地卡羅與重要樣本策略逐步逼近參數(shù)的最優(yōu)概率密度函數(shù)。實(shí)例分別采用合成數(shù)據(jù)與實(shí)測數(shù)據(jù)標(biāo)定智能駕駛模型
2019-01-11 16:23:408 慣性測量單元Inertial measurement unit,簡稱IMU,是測量物體三軸姿態(tài)角(或角速率)及加速度的裝置。陀螺儀和加速度計,是慣性導(dǎo)航系統(tǒng)的核心裝置。借助內(nèi)置的加速度傳感器和陀螺儀,IMU可測量來自三個方向的線性加速度和旋轉(zhuǎn)角速率,通過解算可獲得載體的姿態(tài)、速度和位移等信息。
2019-10-04 17:12:0010522 進(jìn)行標(biāo)定 ,能夠很好的克服傳統(tǒng)標(biāo)定方法在現(xiàn)場應(yīng)用的局限性 ,同時能將標(biāo)定結(jié)果保存為獨(dú)立文件 ,方便調(diào)用。通過對實(shí)際物體的測量 ,驗(yàn)證了方法的可行性 ,能夠很好的提高測量精度。
2020-03-17 08:00:0027 詳細(xì)解說IMU慣性測量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-11 11:00:131752 詳細(xì)解說IMU慣性測量單元 IMU可獲得載體的姿態(tài)、速度和位移等信息,被廣泛用于汽車、機(jī)器人領(lǐng)域,也被用于需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)等慣性導(dǎo)航設(shè)備中。 基于MEMS技術(shù)的IMU
2020-06-01 11:22:016930 IMU和AHRS之間的區(qū)別 AHRS航姿參考系統(tǒng) 航姿參考系統(tǒng)包括基于MEMS的三軸陀螺儀,加速度計和磁強(qiáng)計。航姿參考系統(tǒng)與慣性測量單元IMU的區(qū)別在于,航姿參考系統(tǒng)(AHRS)包含了嵌入式的姿態(tài)
2020-04-20 11:02:132029 IMU慣性測量單元是什么? 慣性測量單元是測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。一般的,一個IMU包含了三個單軸的加速度計和三個單軸的陀螺,加速度計檢測物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度
2020-04-20 10:32:576231 IMU慣性測量單元是什么? IMU大多用在需要進(jìn)行運(yùn)動控制的設(shè)備,如汽車和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。 IMU的基組成 利用
2020-04-18 00:35:09740 IMU慣性測量單元的基本原理 IMU是測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。 其中一個IMU包含了三個單軸的加速度計和三個單軸的陀螺,加速度計檢測物體在載體坐標(biāo)系統(tǒng)獨(dú)立三軸的加速度信號
2020-04-26 15:26:353559 IMU慣性測量單元介紹 慣性測量單元的工作原理是:使用一個或多個加速度感應(yīng)器,探測當(dāng)前的加速度速率;使用一個或多個偏航陀螺儀,檢測在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些慣性測量單元還同時包括
2020-06-08 14:29:334054 IMU與AHRS系統(tǒng)的具體區(qū)別 無人機(jī)的姿態(tài)解算一般有兩種算法,一種是IMU,另一種是被各種無人機(jī)廣泛使用的AHRS,他們之間有什么區(qū)別和聯(lián)系呢? AHRS俗稱航姿參考系統(tǒng), AHRS由加速度計
2020-06-01 10:57:042407 IMU慣性測量單元詳解 慣性測量單元的工作原理。慣性測量單元的工作原理是:使用一個或多個加速度感應(yīng)器,探測當(dāng)前的加速度速率;使用一個或多個偏航陀螺儀,檢測在方向、翻滾角度和傾斜姿態(tài)上的變化。有一些
2020-06-01 10:37:199178 IMU的陀螺和加速度計的測量是沒有任何誤差的那么通過陀螺則可以精確的測量物體的姿態(tài)。通過加速度計可以二次積分得出位移,實(shí)現(xiàn)完整的6DOF,也就是說你帶著一臺這種理論型的IMU在宇宙任何位置運(yùn)動。我們都可以知道他當(dāng)前的姿態(tài)和相對
2020-06-15 10:39:453121 針對IMU的野外測試環(huán)境限制,需改進(jìn)其測試方法,則需用新的硬件采集電路實(shí)現(xiàn)。根據(jù)實(shí)際需要,在CP-132ULV2數(shù)據(jù)采集板的基礎(chǔ)上,采用VC6.0設(shè)計了針對野外測試環(huán)境所需的測試軟件,從而實(shí)現(xiàn)在惡劣環(huán)境下完成對IMU的標(biāo)定工作。
2020-08-13 15:19:351025 
IMU指的是慣性測量單元。IMU大多用在需要進(jìn)行運(yùn)動控制的設(shè)備,如汽車和機(jī)器人上。也被用在需要用姿態(tài)進(jìn)行精密位移推算的場合,如潛艇、飛機(jī)、導(dǎo)彈和航天器的慣性導(dǎo)航設(shè)備等。
2020-11-20 15:24:1954523 張正友相機(jī)標(biāo)定法是張正友教授1998年提出的單平面棋盤格的相機(jī)標(biāo)定方法。傳統(tǒng)標(biāo)定法的標(biāo)定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定
2020-12-31 10:06:195420 
iSensor MEMS慣性測量單元(IMU)手冊
2021-05-24 09:37:1121 針對傳統(tǒng)標(biāo)定方法參數(shù)考慮較少、標(biāo)定精度不高的缺點(diǎn),將群智能算法思想應(yīng)用其中,并在現(xiàn)有的粒子群算法和灰狼算法基礎(chǔ)上進(jìn)行優(yōu)化,取長補(bǔ)短,提出一種混合算法。首先,基于張正友方法獲得標(biāo)定的參數(shù)范圍
2021-05-31 11:09:515 隨著自動駕駛技術(shù)越來多地被人們所提及,相關(guān)的技術(shù)也在不斷的發(fā)展,各類高精度定位、傳感等技術(shù)得到了長足的發(fā)展,而其中有一個冉冉升起的新星,那就是IMU技術(shù)。這個技術(shù)的出現(xiàn)彌補(bǔ)了GPS定位的不足,兩者
2021-07-09 09:18:203891 多旋翼飛行器設(shè)計與控制的傳感器標(biāo)定和測量
2021-09-14 09:26:310 九軸慣性測量單元IMU_MPU6050中文數(shù)據(jù)手冊。
2022-03-07 16:31:472 在大多數(shù)條件下,這些參數(shù)必須通過實(shí)驗(yàn)與計算才能得到。無論是在圖像測量或者機(jī)器視覺應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
2022-06-21 11:12:347612 文中提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定法需要的高精度標(biāo)定物的缺點(diǎn),而僅需使用一個打印出來的棋盤格就可以。同時也相對于自標(biāo)定而言,提高了精度,便于操作。因此張氏標(biāo)定法被廣泛應(yīng)用于計算機(jī)視覺方面。
2022-08-22 10:07:232535 據(jù)麥姆斯咨詢介紹,慣性測量單元(Inertial Measurement Unit,IMU)是測量物體三軸姿態(tài)角(或角速率)以及加速度的裝置。通常,IMU內(nèi)部集成3軸陀螺儀和3軸加速度計,以及運(yùn)動/姿態(tài)算法。如果IMU內(nèi)部集成的傳感器采用MEMS技術(shù)實(shí)現(xiàn),那么可被稱為MEMS IMU。
2022-09-28 10:32:22786 IMU通常包含一個3軸加速度計和一個3軸的陀螺儀,是測量物體三軸姿態(tài)角(或角度率)以及加速度的裝置。
2022-11-11 14:46:532789 張正友相機(jī)標(biāo)定法是張正友教授1998年提出的單平面棋盤格的相機(jī)標(biāo)定方法。傳統(tǒng)標(biāo)定法的標(biāo)定板是需要三維的,需要非常精確,這很難制作,而張正友教授提出的方法介于傳統(tǒng)標(biāo)定法和自標(biāo)定法之間,但克服了傳統(tǒng)標(biāo)定
2022-11-14 10:14:402381 電子發(fā)燒友網(wǎng)站提供《使用arduino/genuino 101的板載慣性測量單元(IMU)教程.zip》資料免費(fèi)下載
2022-12-19 09:35:230 直接使用慣性測量單元 (IMU)
2022-12-28 09:51:22750 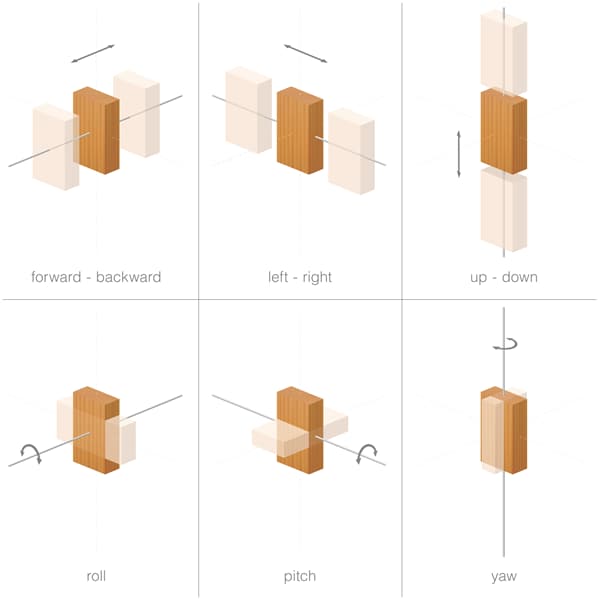
相機(jī)畸變是影響相機(jī)標(biāo)定精度的關(guān)鍵因素。由于畸變補(bǔ)償不準(zhǔn)確,傳統(tǒng)的標(biāo)定方法不能滿足要求較高標(biāo)定精度的測量系統(tǒng)的要求。本文提出了一種基于迭代畸變補(bǔ)償算法的新型相機(jī)標(biāo)定方法。相機(jī)的初始參數(shù)由全場相機(jī)像素
2023-01-05 10:18:32780 到,IMU-TK 這個開源工具是基于此論文為理論依據(jù)開發(fā)的。IMU-TK 這個工具用來標(biāo)定確定性誤差(系統(tǒng)誤差),是一個基于C++的開源IMU數(shù)據(jù)處理庫,用于處理慣性測量單元(IMU)數(shù)據(jù),包括加速度計、陀螺儀和磁力計等傳感器。該庫提供了一組API,可以用于讀取IMU數(shù)據(jù)、進(jìn)行校準(zhǔn)、等操作。
2023-05-24 17:28:59827 
越來越多的機(jī)器人系統(tǒng)配備了多個慣性測量單元(IMU)。由于競爭性目標(biāo),當(dāng)用于控制時期望靠近重心,或者在與外部感知傳感器集成時為了獲得無阻礙的視野,單個IMU經(jīng)常被安裝在相當(dāng)遠(yuǎn)的距離上。
2023-07-08 09:41:451103 
在大多數(shù)條件下,這些參數(shù)必須通過實(shí)驗(yàn)與計算才能得到。無論是在圖像測量或者機(jī)器視覺應(yīng)用中,相機(jī)參數(shù)的標(biāo)定都是非常關(guān)鍵的環(huán)節(jié),其標(biāo)定結(jié)果的精度及算法的穩(wěn)定性直接影響相機(jī)工作產(chǎn)生結(jié)果的準(zhǔn)確性。
2023-08-03 09:38:04830 
投影過程首先是算出歸一化平面上點(diǎn),然后再對歸一化平面上點(diǎn)加rantan、equidistant畸變,最后再作用于內(nèi)參焦距、主點(diǎn),得到成像像素點(diǎn)坐標(biāo)。
2023-08-08 11:41:04293 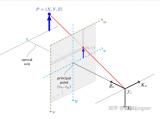
眾所周知,CCP是CANCalibrationProtocolCAN標(biāo)定協(xié)議的縮寫,XCP是UniversalMeasurementandCalibrationProtocol通用測量與標(biāo)定協(xié)議
2023-09-23 08:23:18872 
的外參問題經(jīng)常是IMU/GNSS與車體坐標(biāo)的外參、Lidar和Camera的外參、Lidar和Lidar的外參、Lidar和IMU/GNSS的外參。 離線外參標(biāo)定 1.1 IMU/GNSS與車體外參標(biāo)定 這個
2023-11-20 15:34:23420 
村田MEMS慣性測量單元(IMU)SCHA634產(chǎn)品分析
2023-11-27 16:27:32387 
M-G370PDS0是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角率和線性加速度,并提供高穩(wěn)定性和高精度的測量能力精密補(bǔ)償技術(shù)。各種校準(zhǔn)參數(shù)被存儲在IMU的存儲器中,并且是
2024-01-11 09:55:450 一般描述 M-G370PDF1是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角速率和線性加速度,并提供了高穩(wěn)定性和高精度的測量能力與使用高精度補(bǔ)償技術(shù)。各種校準(zhǔn)參數(shù)被存儲在IMU
2024-01-11 17:00:110 一般描述M-G552PJ1是一個小的形狀因子慣性測量單元(IMU),具有6個自由度:三軸角速率和線性加速度,并提供了高穩(wěn)定性和高精度的測量能力與使用的高精度補(bǔ)償技術(shù)。通過控制器局域網(wǎng)(CAN)接口
2024-01-12 10:56:270
 電子發(fā)燒友App
電子發(fā)燒友App




















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論