") 關(guān)于MATLAB中的機(jī)械臂算法的分析和介紹
關(guān)于MATLAB中的機(jī)械臂算法的分析和介紹
中文路徑在英語(yǔ)中可能有兩種翻譯:
path
trajectory
首先告訴大家,我們所說(shuō)的“路徑”的是后者——trajectory。我們看一下這兩種“路徑”在機(jī)械臂的世界里有什么區(qū)別。
設(shè)想機(jī)械臂的end-effector要從A點(diǎn)運(yùn)動(dòng)到B點(diǎn):

從A到B叫path:
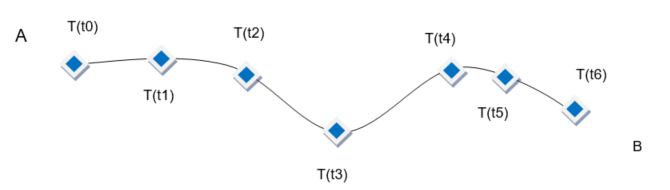
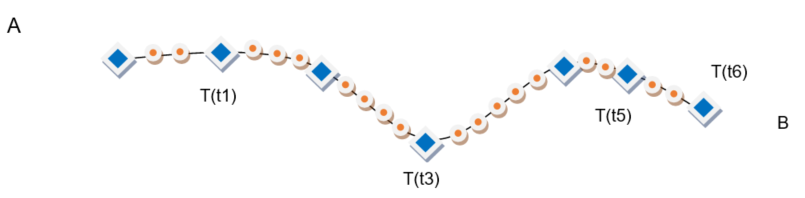
如果我們規(guī)定從A到B這個(gè)path,必須在特定的時(shí)間(t0–t6),經(jīng)過(guò)這7個(gè)點(diǎn)。
那么這7個(gè)點(diǎn)叫waypoints。路徑(trajectory)指的是通過(guò)這7個(gè)點(diǎn)的具體計(jì)劃(例如什么時(shí)間,以什么速度等等)。規(guī)劃我們?nèi)绾谓?jīng)過(guò)這7個(gè)點(diǎn)的算法,叫做路徑規(guī)劃(trajectoryplanning)算法。
上面這7個(gè)點(diǎn),如果機(jī)械臂的end-effector在通過(guò)的時(shí)候,位置連續(xù)、速度連續(xù)、甚至加速度也是連續(xù)的,那么我們說(shuō)這個(gè) trajectory 是平滑的(smooth)。
機(jī)械臂中有幾種比較常見(jiàn)的trajectory:
Trapezoidal Trajectories(梯形路徑)
梯形路徑指的是:
end-effector在相鄰waypoints之間的速度是象梯形一樣,先線性加速,然后速度保持不變,在接近目標(biāo)后線性減速。梯形路徑的優(yōu)點(diǎn)是比較簡(jiǎn)單實(shí)用,但是在每個(gè)waypoint會(huì)有停頓。下圖是一個(gè)機(jī)械臂走梯形路徑的樣例:在過(guò)waypoints的時(shí)候,會(huì)完全停止,所以走的是直線,速度和加速度肯定不連續(xù)。
Polynomial Trajectories(多項(xiàng)式路徑)
其中又分三次多項(xiàng)式和五次多項(xiàng)式。分別寫作:
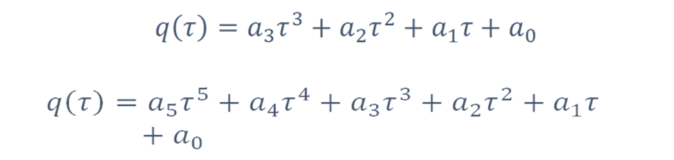
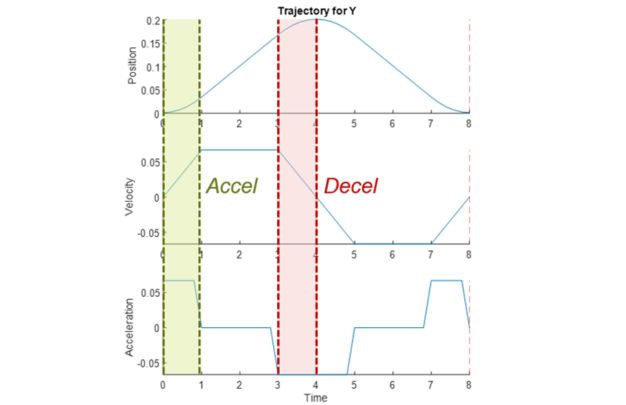
三次多項(xiàng)式可以記錄end-effector的速度、位置的信息。五次多項(xiàng)式可以記錄end-effector的位置、速度、加速度的信息。下圖是一個(gè)五次多項(xiàng)式的例子,可以看到速度、加速度都是連續(xù)的。三次或者五次多項(xiàng)式的trajectory在通過(guò)waypoints的時(shí)候速度都是連續(xù)的,這和梯形路徑是不一樣的。
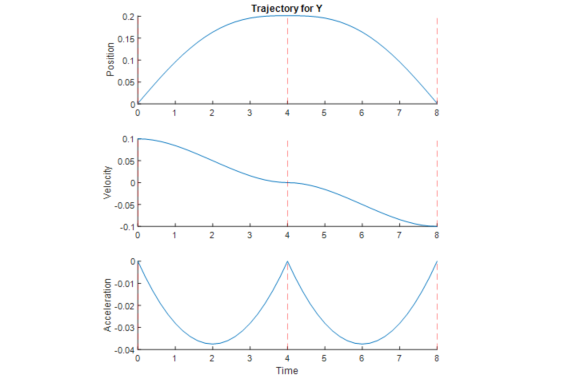
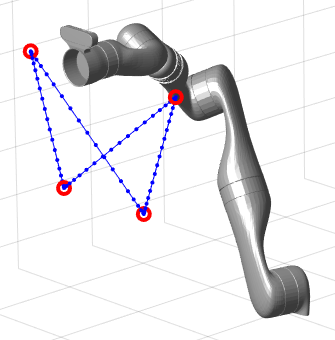
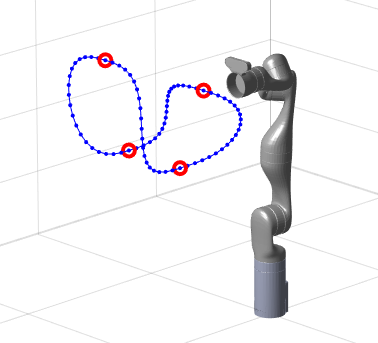
下圖是一個(gè)機(jī)械臂走五次多項(xiàng)式路徑的樣例:為了保證過(guò)waypoints的時(shí)候速度不停頓,走的是曲線。
B-splines(B樣條曲線)
B 樣條曲線將除了起始點(diǎn)和終點(diǎn)外,將其他的 waypoints 看成是控制點(diǎn)(controlpoints)。機(jī)械臂的end-effector并不會(huì)真正通過(guò)這些controlpoints,而在他們之間找一條平滑的曲線。這樣做的目的是在平滑加速度和曲線擬合的準(zhǔn)確性之間找一個(gè)折衷方法。
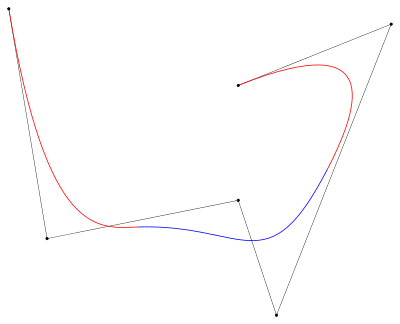
(圖片來(lái)自于Wikipedia)
如果一個(gè)trajectory只有這7個(gè)點(diǎn),無(wú)論機(jī)械臂控制器的運(yùn)動(dòng)控制模塊如何強(qiáng)大,都無(wú)法保證做到“平滑”的運(yùn)行。我們必須對(duì)路徑點(diǎn)進(jìn)行插值(interpolation)。
下圖的橙色點(diǎn)為插值點(diǎn)示意:
在了解插值后,我們來(lái)看一下路徑規(guī)劃出來(lái)的信息如何和傳遞到反向運(yùn)動(dòng)學(xué)(inversekinematics)。反向運(yùn)動(dòng)學(xué)模塊將確保end-effector按照規(guī)劃出來(lái)的路徑運(yùn)行,即路徑跟隨(trajectoryfollowing)。
這里,我們按插值類型情況分兩種模式:
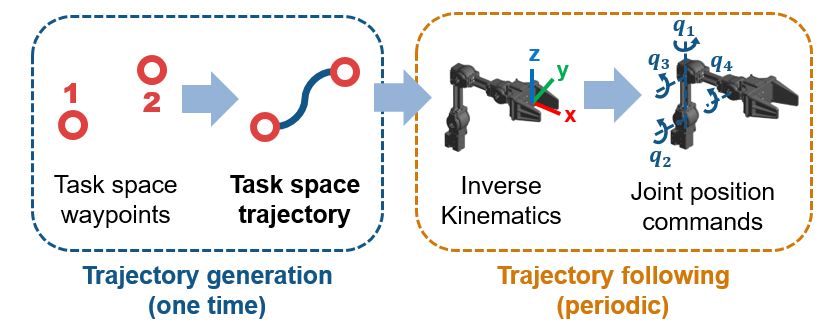
1. Trajectory interpolated in task space
在這種模式下,中間插值的點(diǎn)是在taskspace(即XYZ坐標(biāo)系,或者叫笛卡爾坐標(biāo)系)進(jìn)行插值。下圖表明了這一過(guò)程,這時(shí)候trajectorygeneration只需要做一次,產(chǎn)生所有的waypoints和interpolationpoints(插值點(diǎn))。然后運(yùn)動(dòng)控制系統(tǒng)在每個(gè)控制周期都必須調(diào)用inversekinematics算法去做路徑跟隨(trajectoryfollowing)。
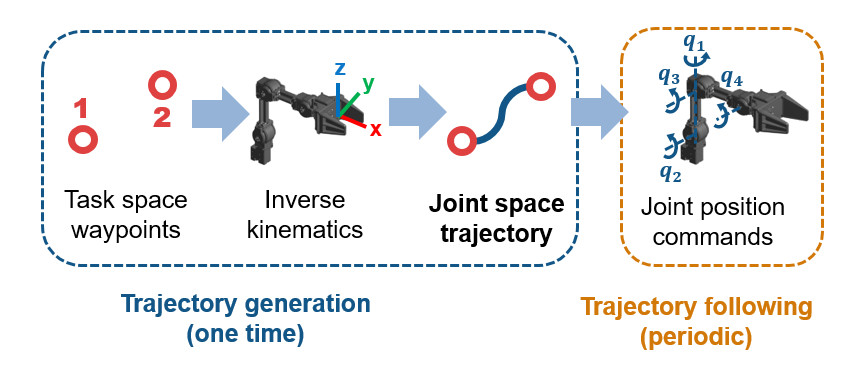
2.Trajectory interpolated in joint space
在這種模式下,中間插值點(diǎn)的點(diǎn)是在jointspace(即對(duì)關(guān)節(jié)角度插值)。下圖表明了這一過(guò)程。這時(shí)候trajectorygeneration也只需要做一次,但做的過(guò)程和taskspace的做法不同。即在每一個(gè)waypoint調(diào)用一次inversekinematics,然后對(duì)關(guān)節(jié)角度的進(jìn)行插值。Trajectoryfollowing模塊只需執(zhí)行插值后的角度指令。
角度方向插值(orientation interpolation)
我們剛才談到的插值,都是針對(duì)end-effector的位置(position,即XYZ的坐標(biāo))。我們不應(yīng)該忽略end-effector的角度方向(orientation)插值。我們看一段動(dòng)畫來(lái)了解一下,什么是orientation的插值:
可以看到,隨著end-effector的移動(dòng),它的方向也在不斷做出平滑的調(diào)整,在end-effector運(yùn)行到目標(biāo)位置后,它的方向也調(diào)整到位。當(dāng)然,有很多場(chǎng)合角度方向是不需要調(diào)整的。例如:噴漆機(jī)械臂,永遠(yuǎn)將end-effector指向噴漆作業(yè)面。
MATLAB 中的機(jī)械臂路徑規(guī)劃算法
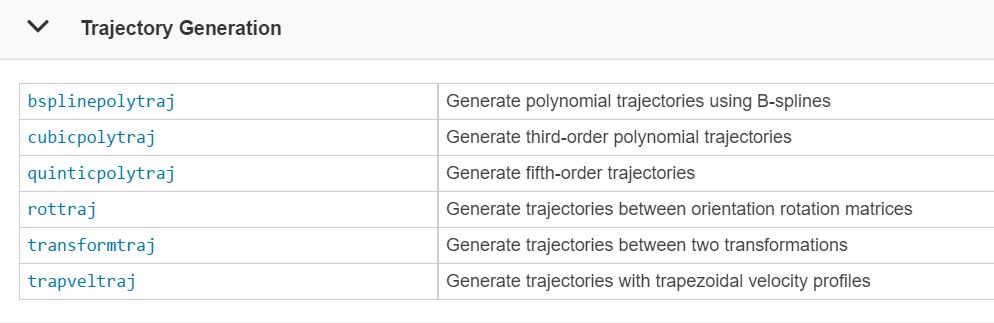
在R2019a 發(fā)布后RoboticsSystemToolbox(RST)中多了幾個(gè)機(jī)械臂路徑規(guī)劃的MATLAB函數(shù)和Simulink模塊。
MATLAB函數(shù):
Simulink模塊:
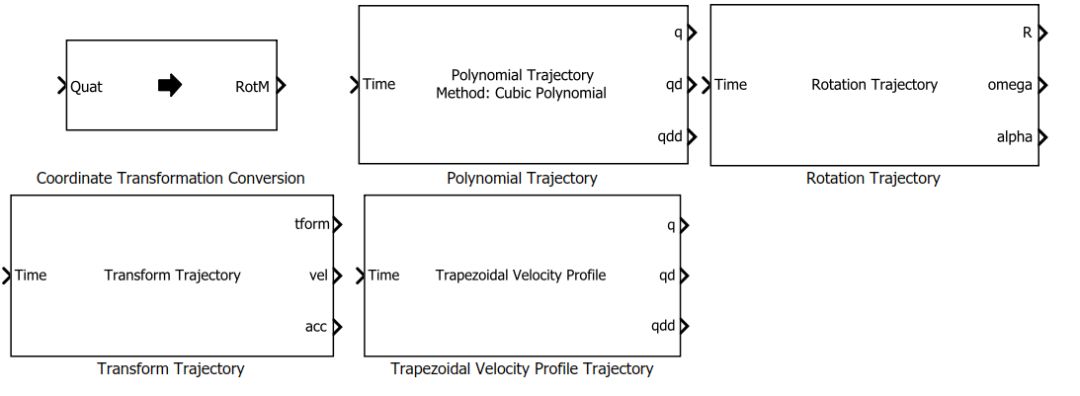
不管是MATLAB函數(shù)還是類似Simulinkblock,大概這么幾項(xiàng)功能:
生成梯形或者多項(xiàng)式的位置 trajectory
生成角度方向的 trajectory
將上兩者合二為一的生成既包含位置,也包含角度方向(合稱pose)的trajectory——即基于homogeneoustransforms的posetrajectory。
讓我們寫幾行代碼,來(lái)產(chǎn)生一個(gè)三次多項(xiàng)式的trajectory:
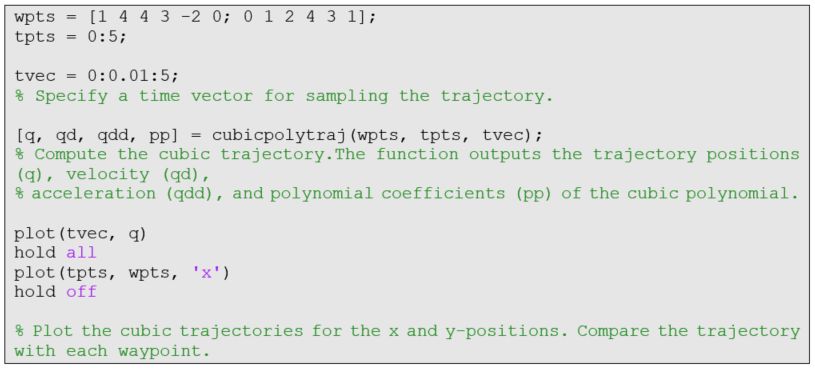
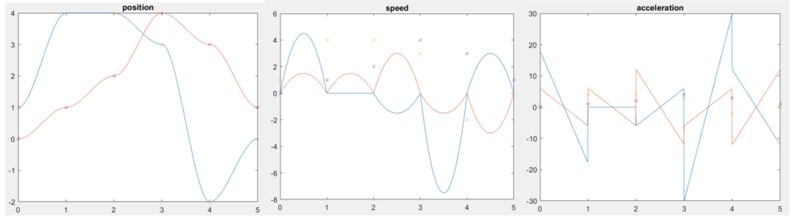
可以看到,位置是連續(xù)的。如果我們將速度(qd)、加速度(qdd)畫出來(lái),可以看到qdd是不連續(xù)的。
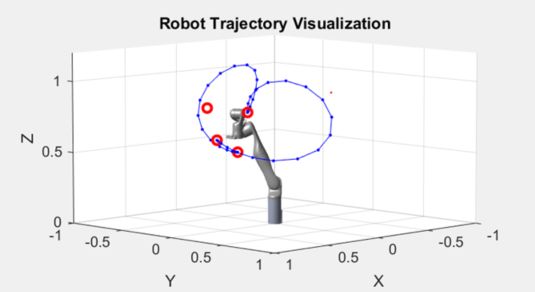
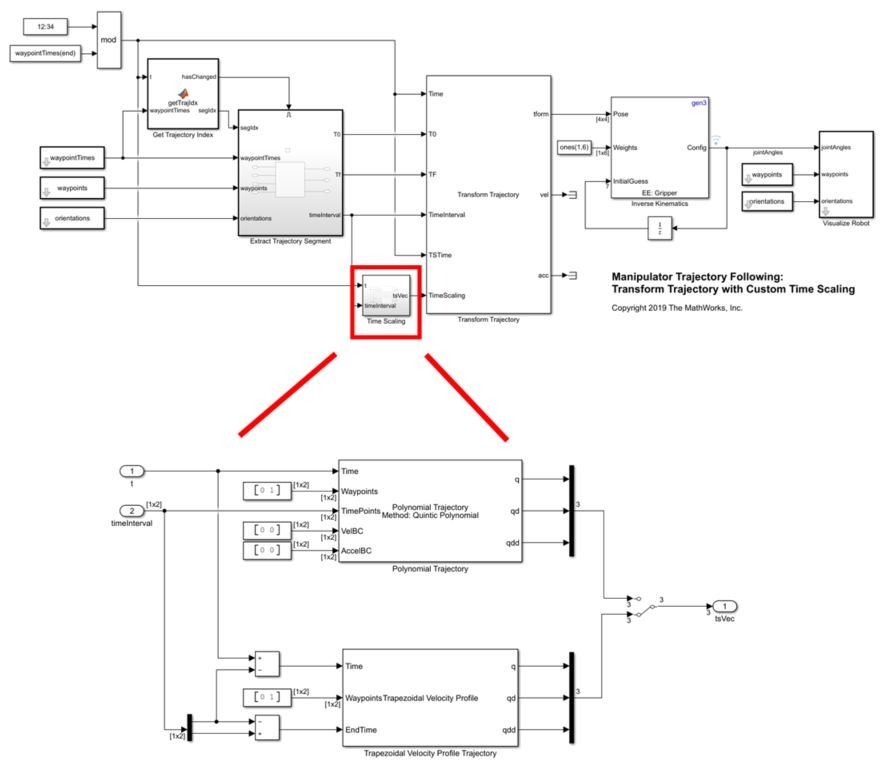
Simulink示例
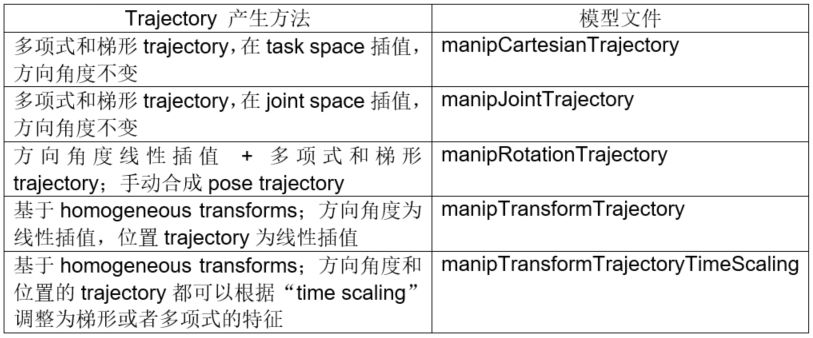
在MATLABfileexchange里搜索“TrajectoryPlanningforRobotManipulators”,會(huì)找到一個(gè)用多種方式產(chǎn)生trajectory的例子。
用一張表格總結(jié)如下:
這里有兩點(diǎn)值得注意:
無(wú)論是MATLAB函數(shù)還是Simulinkblock,所有角度方向的插值都是基于SLERP(sphericallinearinterpolation)。這是一種基于四元數(shù)(quaternions)的插值法。不會(huì)造成下圖所示的“不走近路,繞遠(yuǎn)路”的問(wèn)題。例如,角度要從0度轉(zhuǎn)到30度。因?yàn)閳A周是360度,錯(cuò)誤的方式是從0度轉(zhuǎn)到330度–雖然也能到達(dá)指定位置或者角度,但它是錯(cuò)誤的。在manipJointTrajectory模型中,因?yàn)橛玫搅嘶趈ointspace(關(guān)節(jié)角度)的插值,讀者可以注意一下如何處理這個(gè)問(wèn)題。
Time-scaling。在manipTransformTrajectoryTimeScaling模型中,如果不加timescaling這個(gè)模塊,那么所有的角度變化和位置變化都是基于線性插值。如果加入了“想要的”速度、加速度信息---即timescaling。我們可以使角度變化和位置變化按照我們想要的梯形或者多項(xiàng)式形式去調(diào)整。例如,我想讓角度一開(kāi)始不變,然后快速變化,最后速度為0。
-
加速度
+關(guān)注
關(guān)注
0文章
87瀏覽量
20151 -
機(jī)械臂
+關(guān)注
關(guān)注
12文章
520瀏覽量
24726
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
如何使用PLC控制myCobot 320機(jī)械臂

使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站

深度解析!RK3568 加持機(jī)械臂是如何實(shí)現(xiàn)顏色識(shí)別與抓取的?

RK3568國(guó)產(chǎn)實(shí)驗(yàn)箱+人工智能機(jī)械臂:跳舞、疊羅漢、夾方塊、積木搬運(yùn)案例全解!
機(jī)械臂的高效運(yùn)作,連接器起關(guān)鍵作用
【原創(chuàng)】 drawbot 平面機(jī)械臂scara寫字畫畫機(jī)器人DIY教程貼
OrangePi AIpro應(yīng)用:機(jī)械臂應(yīng)用開(kāi)發(fā)指南

工業(yè)機(jī)器人和機(jī)械臂的設(shè)計(jì)、功能和應(yīng)用有哪些區(qū)別?
奧比中光推出2.0版大模型機(jī)械臂
大象機(jī)器人開(kāi)源協(xié)作機(jī)械臂機(jī)械臂接入GPT4o大模型!

國(guó)產(chǎn)Cortex-A55人工智能教學(xué)實(shí)驗(yàn)箱_基于Python機(jī)械臂跳舞實(shí)驗(yàn)案例分享
基于六維力傳感器的機(jī)械臂自動(dòng)裝配應(yīng)用

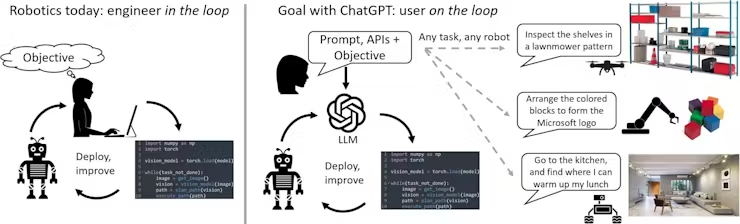
自然語(yǔ)言控制機(jī)械臂:ChatGPT與機(jī)器人技術(shù)的融合創(chuàng)新(下)

機(jī)械臂技術(shù)的前沿探索:年度案例回顧!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論