") 木質(zhì)機(jī)械臂DIY圖解
木質(zhì)機(jī)械臂DIY圖解
步驟1:說明
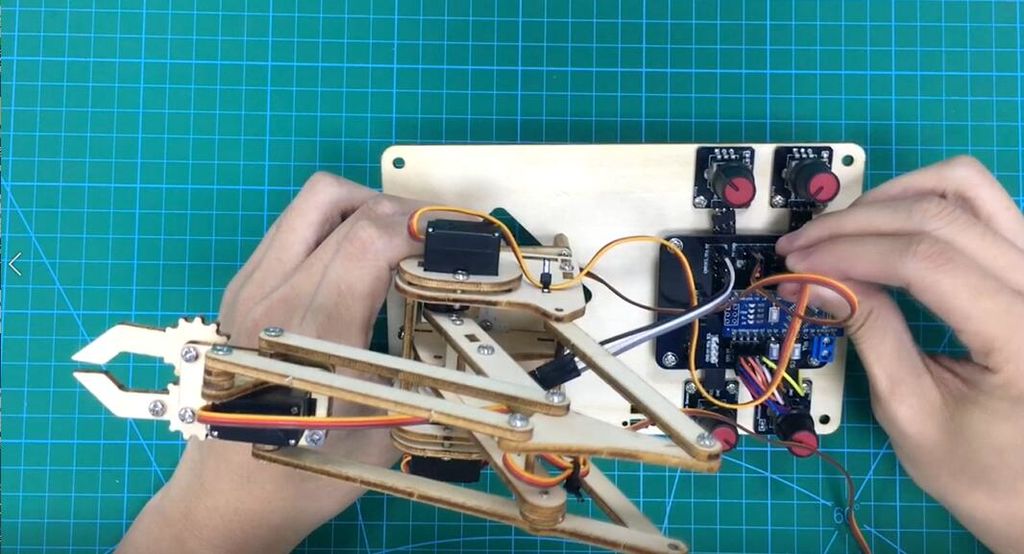
LewanSoul-WoodenArm是基于Arduino Nano板的性能強(qiáng)大的木制機(jī)械臂。整個(gè)機(jī)械臂的機(jī)械結(jié)構(gòu)由純木制成。它的外觀精致小巧,結(jié)構(gòu)穩(wěn)定性強(qiáng)。它使用的主要控制芯片是Arduino Nano板。輸出是LFD-01伺服器,可以同時(shí)連接多個(gè)模塊。可以基于不同的傳感器模塊創(chuàng)建各種有趣的游戲。
步驟2:了解零件
這個(gè)可愛的WoodenArm具有各種電子模塊:加速模塊ADXL-345,顏色模塊APDS-9960,旋鈕模塊,LED顯示屏,LDF-01伺服器。
此外,基于Arduino Nano控制板,我們開發(fā)了自己的Arduino擴(kuò)展板以具有更多的功能模塊,然后使用WoodenArm實(shí)現(xiàn)更多的創(chuàng)造力,更好的學(xué)習(xí)編程和過程中的經(jīng)驗(yàn),帶給我們快樂。因此,聰明的WoodenArm有能力實(shí)現(xiàn)不同的游戲玩法。
第3步:車身組裝_1

所需材料:
機(jī)器人手臂支架* 1
LDF-01伺服器* 1
螺絲刀* 1
螺絲*多個(gè)
您需要如圖所示安裝身體的一部分。只需用螺釘固定小塊,然后使用螺釘和伺服器將它們固定在一起。在此過程中,請(qǐng)注意調(diào)整螺釘?shù)乃删o度。注意調(diào)整松緊度。此過程測(cè)試三顆星的手的能力。
步驟4:車身組裝_2









所需材料:
機(jī)器人手臂支架* 1
LDF-01伺服器* 1
螺絲刀* 1
螺絲**
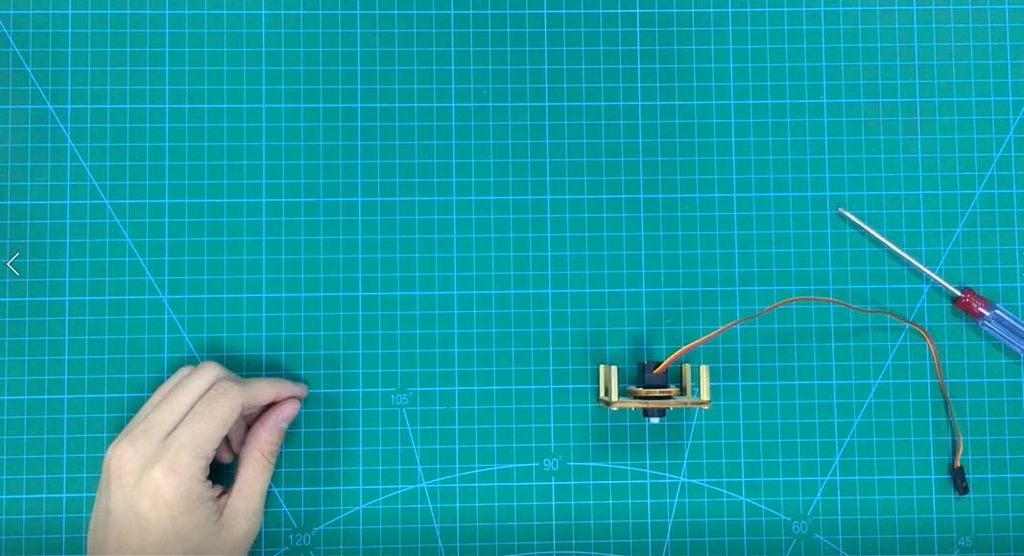
您需要安裝身體的一部分,如圖所示。
只需用相應(yīng)的螺釘固定小塊,然后用螺釘將伺服器和塊連接并固定,然后將伺服器和塊固定在一起。注意調(diào)整松緊度。此過程測(cè)試2星的手的能力。
步驟5:車身組裝_3












所需材料:
機(jī)器人手臂支架* 1
LDF-01伺服* 1
螺絲刀* 1
螺絲**
您需要如圖所示安裝身體的一部分。這一部分比上一部分要簡單一些。只需用相應(yīng)的螺釘固定小塊,然后將它們與上一步中組裝的伺服器一起安裝。注意調(diào)整松緊度。此過程測(cè)試3星的動(dòng)手能力。
步驟6:爪式裝配











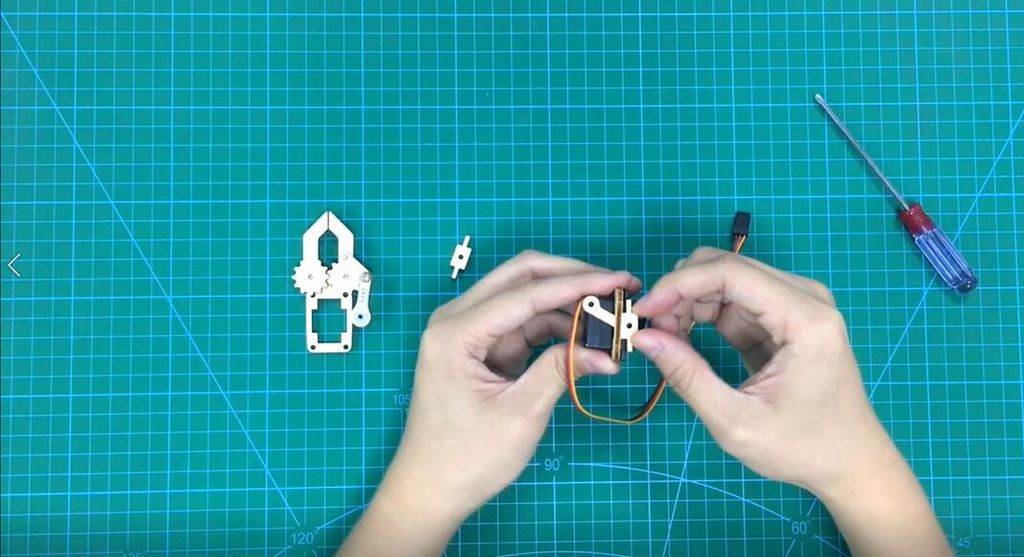
所需材料:
機(jī)械手臂支架* 1
LDF-01伺服* 1
螺絲刀* 1
螺絲**數(shù)
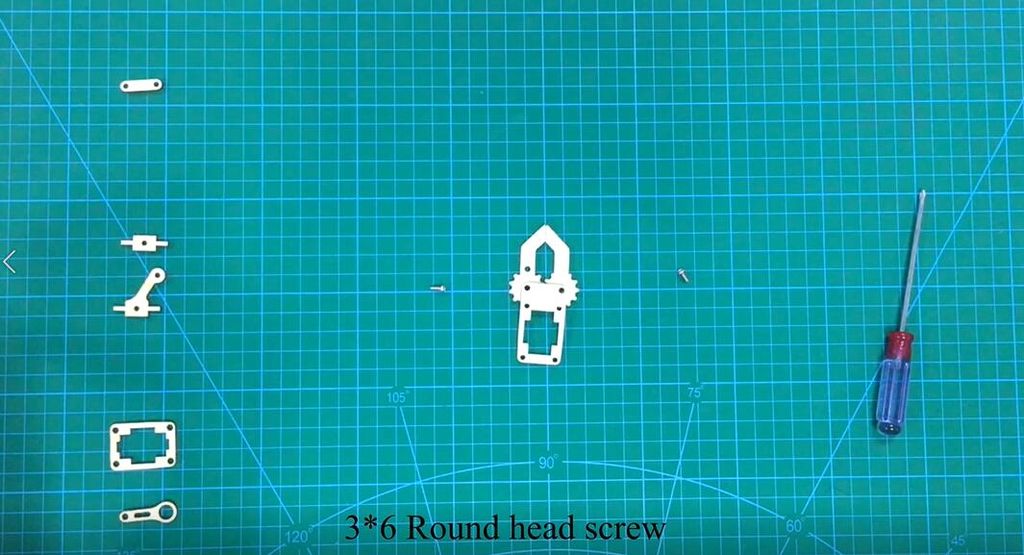
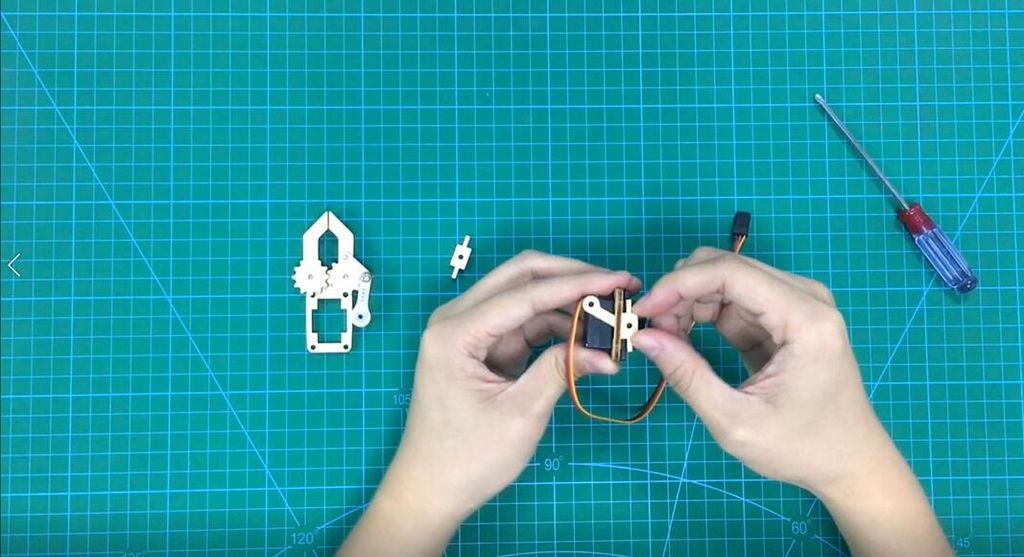
您需要如圖所示安裝爪。只需用相應(yīng)的螺絲固定小木塊,然后用螺絲將伺服器和木塊連接并固定,然后將伺服器和小木塊固定在一起即可。
請(qǐng)注意調(diào)整松緊度。此過程測(cè)試了4星的指針能力。
步驟7:機(jī)箱組裝




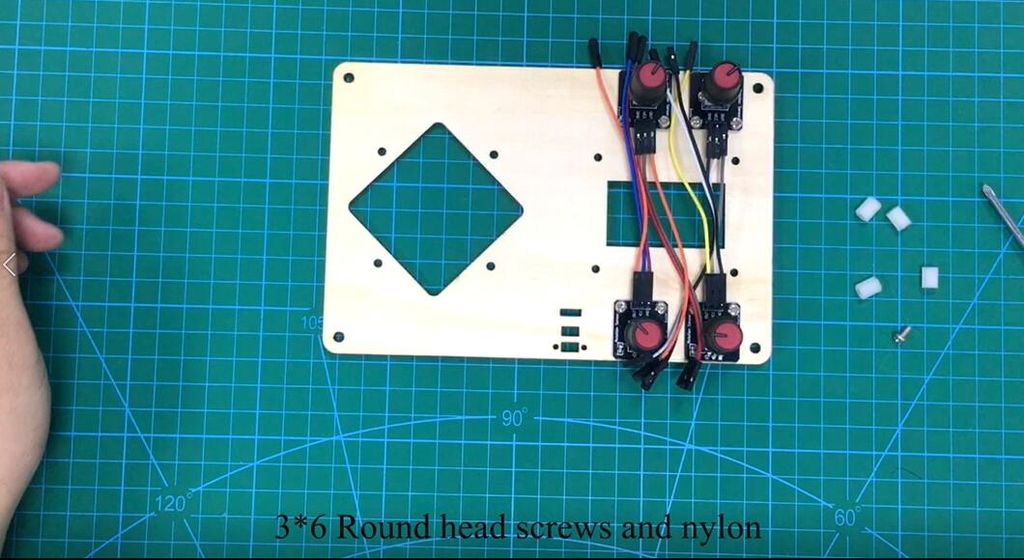



所需材料:
機(jī)器人手臂車身支架* 1
杜邦線* 4
螺絲*多個(gè)
尼龍* 4
旋鈕模塊* 4
Arduino Nano控制板* 1
擴(kuò)展板* 1
您需要如圖所示安裝機(jī)箱。這部分是用螺絲將旋鈕模塊固定到基座上。同時(shí),需要在旋鈕模塊上插入杜邦線。最后,將Arduino Nano控制板和Arduino擴(kuò)展板擰入四個(gè)旋鈕模塊的中間。此過程測(cè)試四顆星的手的能力。
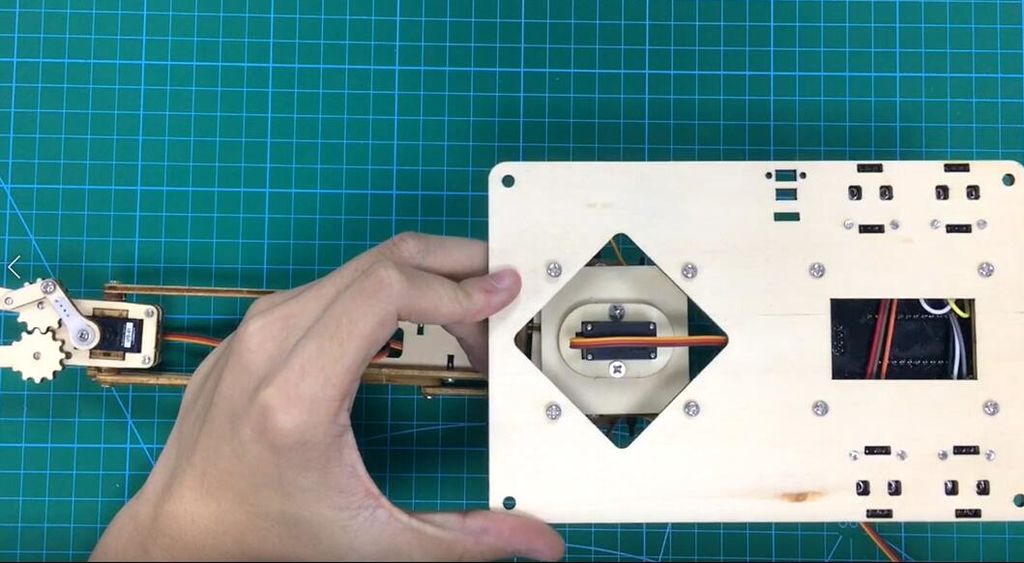
步驟8:整體組裝



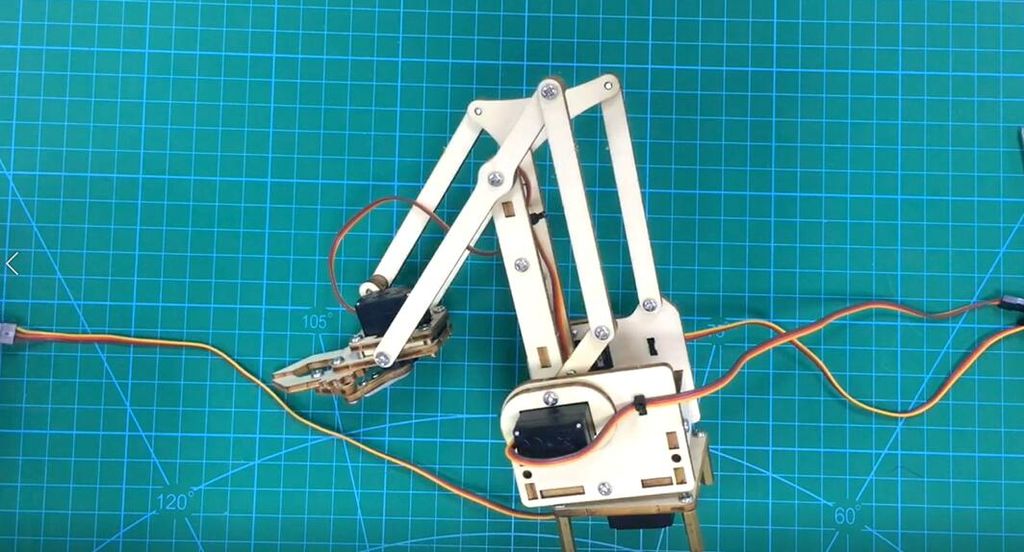








所需材料:
30cm纏繞管* 1
螺絲*幾個(gè)
吸盤,墊圈,墊圈,螺母* 1
滾動(dòng)帶* 4
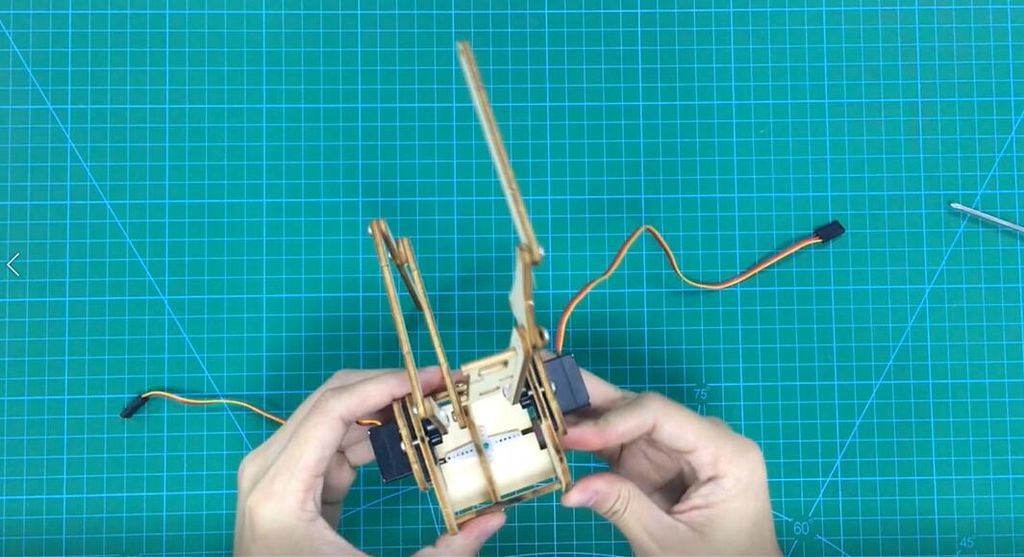
恭喜,您終于到了安裝的最后一步。您需要如圖所示安裝其余部分。在此步驟中,您需要將先前安裝的基座和手臂部分固定在一起,以便可以成為完整的WoodeArm。此過程測(cè)試了三顆星的手的能力。
https://www.youtube.com/playlist?list=PLQYW5Ukp- 1D-4u2Z8CBjoQ4pSFhfnP74B
第9步:設(shè)計(jì)注意事項(xiàng)
市場(chǎng)上有很多金屬車,包括我們自己的產(chǎn)品。但是,隨著時(shí)代的變遷,我們一直在思考如何與時(shí)代融合,并呼應(yīng)當(dāng)代倡導(dǎo)的主題。在這個(gè)想法的驅(qū)使下,我們?cè)O(shè)計(jì)了木制車WoodenArm。汽車的外殼是木質(zhì)的,因此顯示了環(huán)保主題。在我們的安裝包中,手推車底座和臂上使用的木材是固定的,經(jīng)過完美切割后,由于安裝后的零浪費(fèi),所有組件都可以派上用場(chǎng)。汽車上的Arduino Nano控制板和我們自己的Arduino擴(kuò)展板也使汽車在功能上更加強(qiáng)大,并激發(fā)了用戶的創(chuàng)造力。我們支持所有創(chuàng)意。此外,復(fù)古的外觀,輕巧的外觀,不傷手的材料,易于安裝的功能以及強(qiáng)大的功能使該產(chǎn)品與眾不同。
步驟10:游戲和最終備注
您可以使用計(jì)算機(jī)或紅外線遙控器控制木臂。
您可以插入將該程序放入Arduino Nano控制板以控制WoodenArm。您還可以修改程序,甚至自己創(chuàng)建一個(gè)新程序。實(shí)際上,為了幫助用戶更好地了解WoodenArm開發(fā)工具包,我們?yōu)橛脩魷?zhǔn)備了一些有趣的游戲玩法,幫助他們快速開始使用WoodenArm學(xué)習(xí)(您可以參考我們的LewanSoul網(wǎng)站)。
責(zé)任編輯:wv
-
機(jī)械臂
+關(guān)注
關(guān)注
12文章
520瀏覽量
24725
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
如何使用PLC控制myCobot 320機(jī)械臂

使用myCobot 280機(jī)械臂結(jié)合ROS2系統(tǒng)搭建機(jī)械分揀站

深度解析!RK3568 加持機(jī)械臂是如何實(shí)現(xiàn)顏色識(shí)別與抓取的?

RK3568國產(chǎn)實(shí)驗(yàn)箱+人工智能機(jī)械臂:跳舞、疊羅漢、夾方塊、積木搬運(yùn)案例全解!
“雙保險(xiǎn)”鎖緊機(jī)制:YM28系列連接器為機(jī)械臂提供高牢靠的大電流連接

機(jī)械臂的高效運(yùn)作,連接器起關(guān)鍵作用
【原創(chuàng)】 drawbot 平面機(jī)械臂scara寫字畫畫機(jī)器人DIY教程貼
OrangePi AIpro應(yīng)用:機(jī)械臂應(yīng)用開發(fā)指南

工業(yè)機(jī)器人和機(jī)械臂的設(shè)計(jì)、功能和應(yīng)用有哪些區(qū)別?
奧比中光推出2.0版大模型機(jī)械臂
大象機(jī)器人開源協(xié)作機(jī)械臂機(jī)械臂接入GPT4o大模型!

國產(chǎn)Cortex-A55人工智能教學(xué)實(shí)驗(yàn)箱_基于Python機(jī)械臂跳舞實(shí)驗(yàn)案例分享
基于六維力傳感器的機(jī)械臂自動(dòng)裝配應(yīng)用

機(jī)械臂技術(shù)的前沿探索:年度案例回顧!
如何去提升機(jī)械臂的位置控制性能?

- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論