") 專為3D激光三角測(cè)量法應(yīng)用而設(shè)計(jì)CMOS傳感器系列
專為3D激光三角測(cè)量法應(yīng)用而設(shè)計(jì)CMOS傳感器系列
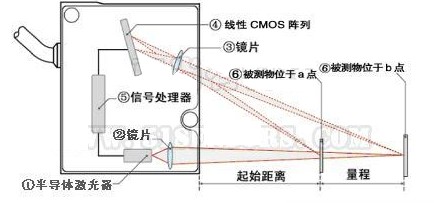
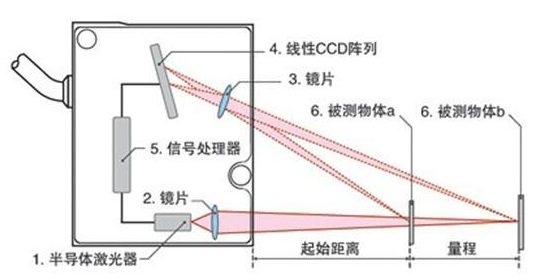
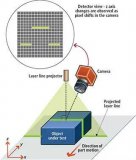
法國(guó)格勒諾布爾, Sept. 03, 2019 (GLOBE NEWSWIRE) -- Teledyne e2v,Teledyne Technologies [NYSE:TDY] 旗下的全球成像解決方案創(chuàng)新公司,宣布推出其 Flash CMOS 圖像傳感器系列,該系列專為 3D 激光輪廓分析/位移分析應(yīng)用和高速、高分辨率檢測(cè)量身定制。
新款 Flash 傳感器采用 6μm CMOS 全局快門像素,有效地結(jié)合了高分辨率和高幀率。提供 4k 或 2k 水平解析度,畫面播放速率各為 1800fps 和 1500fps (8 位元),對(duì)應(yīng)的讀出速度分別是 61.4Gbps 和 25.6Gbps (市面上最佳的 Gbps/價(jià)格比)。感測(cè)器使用適合標(biāo)準(zhǔn)光學(xué)格式的 μPGA 陶瓷包裝,在 4k 中有類似 APS 的光學(xué)格式,在 2k 中則為 C 型底座。
新型傳感器旨在為相機(jī)制造商提供簡(jiǎn)單且性價(jià)比高的方案整合,并內(nèi)建廣泛的功能應(yīng)用,包括:
● 高達(dá)100dB的高動(dòng)態(tài)范圍,能有效檢測(cè)出強(qiáng)反射面和暗部區(qū)域
● 多個(gè)感興趣區(qū)域模式,可在高度測(cè)量中提供剖析速率和范圍/分辨率之間的理想折衷
● 幀到幀“熱”改變模式,可根據(jù)自身需求,靈活并且實(shí)時(shí)修改某些參數(shù)(曝光時(shí)間、像素合并、ROI、翻轉(zhuǎn)和轉(zhuǎn)換時(shí)間)
● 不同的觸發(fā)模式,使客戶可以根據(jù)生產(chǎn)線的速度進(jìn)行調(diào)整
Flash圖像傳感器在傳感器級(jí)別提供各種衍生產(chǎn)品,因此客戶可以區(qū)別應(yīng)對(duì)特定的應(yīng)用挑戰(zhàn)。示例包括多種操作模式,這些模式在幀速率、功耗和位數(shù)之間進(jìn)行權(quán)衡,通過(guò)利用水平像素合并提高幀速率,并且能夠最佳地?cái)M合特定應(yīng)用所需的 Scheimpflug 角度。
Teledyne e2v 3D 營(yíng)銷經(jīng)理 Yoann Lochardet 說(shuō):“我們非常高興宣布推出全新的 Flash 系列 CMOS 傳感器。在開(kāi)發(fā)這些傳感器之前,我們仔細(xì)聆聽(tīng)了行業(yè)領(lǐng)先企業(yè)的要求。這些新型傳感器具有針對(duì) 3D 激光三角測(cè)量應(yīng)用的一系列特性,包括:高分辨率、極高的幀速率、極高的讀出速度、HDR 功能和大量附加功能。所有這些功能使我們的客戶可以解決 3D 激光輪廓分析/位移分析中最具挑戰(zhàn)性的應(yīng)用需求,例如質(zhì)量控制和 3D 測(cè)量。”
Flash 2K 和 Flash 4K 的評(píng)估套件和樣品現(xiàn)已準(zhǔn)備就緒。
-
CMOS
+關(guān)注
關(guān)注
58文章
5736瀏覽量
236099 -
3D
+關(guān)注
關(guān)注
9文章
2912瀏覽量
108009
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
常用傳感器原理
激光三角反射式傳感器原理
激光位移傳感器的激光三角測(cè)量法原理和回波分析原理
三角測(cè)量傳感器可實(shí)現(xiàn)很高的測(cè)量精度
Micro-Epsilon的激光三角測(cè)量傳感器為位移和距離測(cè)量設(shè)定了新標(biāo)準(zhǔn)
簡(jiǎn)析激光三角測(cè)量技術(shù)的發(fā)展應(yīng)用前景
如何配置基于激光的3D三角測(cè)量系統(tǒng)以及如何設(shè)置激光線參數(shù)
激光三角測(cè)量方法在不同場(chǎng)景的應(yīng)用
激光位移傳感器與其他位移傳感器的比較
小型激光位移傳感器激光測(cè)量原理
應(yīng)用于機(jī)器視覺(jué)的3D激光三角測(cè)量技術(shù)
激光位移傳感器不出光的原因 激光位移傳感器的工作原理
基于激光的3D三角測(cè)量系統(tǒng)中激光線參數(shù)設(shè)置
3D三維掃描儀的光學(xué)測(cè)量技術(shù)知識(shí)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論