") LiDAR的工作原理
LiDAR的工作原理
無人駕駛汽車是1990年代最大的技術(shù)幻想之一(由諸如“ The Love Bug”和“ Demolition Man”等早期電影推動),由于多種技術(shù)尤其是 LIDAR 。
什么是LiDAR?
LIDAR (代表光檢測和測距)是一種測距技術(shù),它通過在目標(biāo)上發(fā)射光束來測量物體的距離,并使用反射光束的時間和波長來估計(jì)距離,并且在某些應(yīng)用中(激光成像),創(chuàng)建對象的3D表示。
雖然激光背后的想法可以追溯到1930年EH Synge的工作,但直到1960年代初期,激光發(fā)明之后。它本質(zhì)上是將激光聚焦成像與使用飛行時間技術(shù)計(jì)算距離的能力相結(jié)合,它在氣象學(xué)(用于測量云)和空間中(在其中激光高度計(jì)用于繪制地圖)的最早應(yīng)用中得到了應(yīng)用。阿波羅15號任務(wù)期間的月球表面。從那時起,該技術(shù)得到了改進(jìn),并已用于多種應(yīng)用中,包括:檢測地震活動,海洋學(xué),考古學(xué)和導(dǎo)航等。
LiDAR的工作原理
與RADAR(艦船和飛機(jī)使用的無線電波導(dǎo)航)和SONAR(水下的物體探測和使用聲音的導(dǎo)航,主要由潛艇使用)非常相似,它們都使用波的反射原理進(jìn)行物體探測和距離估計(jì)。但是,雖然RADAR是基于無線電波,而SONAR是基于聲音,但 LIDAR是基于光束(激光)。
LIDAR使用不同波長的光,包括:紫外線,可見光或近紅外光來使物體成像,并因此能夠檢測到各種物質(zhì)成分,包括;非金屬,巖石,雨水,化合物,氣溶膠,云甚至單個分子。 LIDAR系統(tǒng)可以每秒發(fā)射多達(dá)1,000,000個光脈沖,并使用脈沖反射回掃描儀所花費(fèi)的時間來確定掃描儀周圍物體和表面所處的距離。用于距離確定的技術(shù)稱為飛行時間,其等式如下所示。
Distance = (Speed of Light x Time of Flight) / 2
在大多數(shù)應(yīng)用中,除了遠(yuǎn)距離測量外,還創(chuàng)建了光束發(fā)射所在的環(huán)境/物體的3D地圖。這是通過在物體或環(huán)境上連續(xù)發(fā)射激光束來完成的。
重要的是,與在平面鏡中獲得的鏡面反射相反,在LIDAR系統(tǒng)中遇到的反射是后向散射反射,因?yàn)楣獠ㄍㄟ^其到達(dá)的方向擴(kuò)散回去。根據(jù)應(yīng)用,LIDAR系統(tǒng)使用不同的反向散射變體,包括瑞利散射和拉曼散射,
LIDAR系統(tǒng)的組成部分
LIDAR系統(tǒng)通常由5個元素組成,無論由于應(yīng)用而引起的變化,都將預(yù)期存在。這些主要組件包括:
激光
掃描儀和光學(xué)系統(tǒng)
精確定時電子設(shè)備
慣性測量單元和GPS
1。激光
激光是光脈沖的能量來源。由于某些應(yīng)用的特定要求,激光雷達(dá)系統(tǒng)中部署的激光波長因一種應(yīng)用而異。例如,機(jī)載LiDAR系統(tǒng)使用1064 nm二極管泵浦的YAG激光器,而測深系統(tǒng)使用532nm雙二極管泵浦的YAG激光器,其穿透水(最長40米)時的衰減比機(jī)載1064nm版本要小得多。但是,不管使用哪種應(yīng)用,使用的激光器通常都是低能量的,以確保安全。
2。掃描儀和光學(xué)器件
掃描儀是任何激光雷達(dá)系統(tǒng)的重要組成部分。他們負(fù)責(zé)將激光脈沖投射到表面并接收從表面反射回來的脈沖。 LIDAR系統(tǒng)顯影圖像的速度取決于掃描儀捕獲反向散射光束的速度。無論何種應(yīng)用,LIDAR系統(tǒng)中使用的光學(xué)器件都必須具有高精度和高質(zhì)量,才能獲得最佳效果,尤其是對于制圖而言。透鏡的類型,特定的玻璃選擇以及所使用的光學(xué)鍍膜是LIDAR分辨率和測距能力的主要決定因素。
根據(jù)應(yīng)用的不同,可以針對不同的應(yīng)用部署各種掃描方法決議。方位角和仰角掃描以及雙軸掃描是一些最流行的掃描方法。
3。處理器
高容量處理器通常是任何LIDAR系統(tǒng)的核心。它用于同步和協(xié)調(diào)LIDAR系統(tǒng)所有單個組件的活動,以確保所有組件都在應(yīng)有的狀態(tài)下工作。處理器將來自掃描儀,計(jì)時器(如果未內(nèi)置在處理子系統(tǒng)中),GPS和IMU的數(shù)據(jù)進(jìn)行集成,以生成LIDAR點(diǎn)數(shù)據(jù)。然后,根據(jù)應(yīng)用程序?qū)⑦@些高程點(diǎn)數(shù)據(jù)用于創(chuàng)建地圖。在無人駕駛汽車中,點(diǎn)數(shù)據(jù)用于提供環(huán)境的實(shí)時地圖,以幫助避障和一般導(dǎo)航的汽車。
光速約為0.3納秒/納秒,通常,由于成千上萬的光束反射回掃描儀,所以通常要求處理器具有高速度和高處理能力。因此,計(jì)算元件處理能力的提高一直是激光雷達(dá)技術(shù)的主要驅(qū)動力之一。
4。定時電子
精確的定時在LIDAR系統(tǒng)中至關(guān)重要,因?yàn)檎麄€操作都是按時進(jìn)行的。計(jì)時電子設(shè)備代表LIDAR子系統(tǒng),該子系統(tǒng)記錄激光脈沖離開的確切時間以及激光脈沖返回到掃描儀的確切時間。
其精度和準(zhǔn)確性不能過分強(qiáng)調(diào)。由于散射的反射,發(fā)出的脈沖通常具有多個返回,每個返回都需要精確計(jì)時以確保數(shù)據(jù)的準(zhǔn)確性。
5。慣性測量單元和GPS
將LiDAR傳感器安裝在衛(wèi)星,飛機(jī)或汽車等移動平臺上時,有必要確定傳感器的絕對位置和方向以保持可用數(shù)據(jù)。這是通過使用慣性測量系統(tǒng)(IMU)和全球定位系統(tǒng)(GPS)來實(shí)現(xiàn)的。 IMU通常由加速度計(jì),陀螺儀和磁力計(jì)組成,以測量速度,方向和重力,將它們組合在一起即可確定掃描儀相對于地面的角度方向(俯仰,橫滾和偏航)。另一方面,GPS提供了有關(guān)傳感器位置的準(zhǔn)確地理信息,因此可以直接對目標(biāo)點(diǎn)進(jìn)行地理配準(zhǔn)。這兩個組件提供了將傳感器數(shù)據(jù)轉(zhuǎn)換為靜態(tài)點(diǎn)以在各種系統(tǒng)中使用的方法。
使用GPS和IMU獲得的額外信息對于所獲取數(shù)據(jù)的完整性至關(guān)重要,并且有助于確保可以正確估計(jì)到表面的距離,尤其是在移動LIDAR應(yīng)用程序中,例如在自動駕駛汽車和基于飛機(jī)的想象系統(tǒng)中。
LiDAR的類型
雖然LIDAR系統(tǒng)可以基于多種因素進(jìn)行分類,但存在三種通用的LIDAR系統(tǒng)類型:
測距儀LIDAR
差分吸收LIDAR
多普勒LIDAR
1。測距儀激光雷達(dá)
這些是最簡單的激光雷達(dá)系統(tǒng)。它們用于確定從LIDAR掃描儀到物體或表面的距離。通過使用“工作原理”部分所述的飛行時間原理,反射光束入射到掃描儀上所花費(fèi)的時間被用來確定激光雷達(dá)系統(tǒng)與物體之間的距離。
2。差分吸收LIDAR
差分吸收LIDAR系統(tǒng)(有時稱為DIAL)通常用于研究某些分子或材料的存在。 DIAL系統(tǒng)通常會發(fā)射兩種波長的激光束,選擇的波長應(yīng)使目標(biāo)分子吸收其中一個波長,而另一個波長則不會。光束之一的吸收導(dǎo)致由掃描儀接收的返回光束的強(qiáng)度的差異(差分吸收)。然后使用這種差異來推論所研究分子的存在水平。 DIAL已用于測量大氣中的化學(xué)濃度(例如臭氧,水蒸氣,污染物)。
3。多普勒激光雷達(dá)
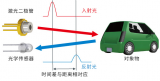
多普勒激光雷達(dá)用于測量目標(biāo)的速度。當(dāng)從激光雷達(dá)發(fā)射的光束擊中朝向或遠(yuǎn)離激光雷達(dá)的目標(biāo)時,從目標(biāo)反射/散射的光的波長將略有變化。這就是所謂的多普勒頻移-結(jié)果就是多普勒激光雷達(dá)。如果目標(biāo)遠(yuǎn)離LiDAR,則返回光將具有較長的波長(有時稱為紅移),如果朝LiDAR方向移動,則返回光將具有較短的波長(藍(lán)移)。
將LIDAR系統(tǒng)歸類為類型的其他一些分類包括:
平臺
反向散射的類型
基于平臺的LiDAR類型
使用平臺作為標(biāo)準(zhǔn),LIDAR系統(tǒng)可以分為以下四種類型:
基于地面的激光雷達(dá)
機(jī)載激光雷達(dá)
星空激光雷達(dá)
運(yùn)動激光雷達(dá)
這些激光雷達(dá)通常會選擇不同的結(jié)構(gòu),材料,波長,外觀和其他因素來適應(yīng)要在其部署環(huán)境中使用的因素。
基于反向散射類型的激光雷達(dá)
在描述激光雷達(dá)系統(tǒng)如何工作時,我提到LIDAR中的反射是通過反向散射。不同類型的反向散射出口及其有時用于描述激光雷達(dá)的類型。反向散射的類型包括;
Mie
Rayleigh
Raman
熒光
激光雷達(dá)的應(yīng)用
由于激光雷達(dá)的極高的準(zhǔn)確性和靈活性,激光雷達(dá)具有廣泛的應(yīng)用,特別是高分辨率地圖的制作。除了測量之外,LIDAR還被用于農(nóng)業(yè),考古和機(jī)器人領(lǐng)域,因?yàn)樗壳笆亲詣玉{駛汽車競賽的主要推動力之一,它是大多數(shù)具有LIDAR系統(tǒng)功能的車輛中使用的主要傳感器。
LiDAR的其他應(yīng)用有100多種,并將在下面盡可能多地提及。
自動駕駛汽車
3D成像
土地調(diào)查
電力線檢查
旅游與公園管理
森林保護(hù)環(huán)境評估
洪水建模
生態(tài)與土地分類
污染建模
油氣勘探
氣象學(xué)
海洋學(xué)
各種軍事應(yīng)用
細(xì)胞網(wǎng)絡(luò)規(guī)劃
天文學(xué)
LiDAR局限性
LIDAR像其他所有技術(shù)一樣都有其缺點(diǎn)。在惡劣天氣下,LIDAR系統(tǒng)的范圍和準(zhǔn)確性會受到嚴(yán)重影響。例如,在有霧條件下,由于光束被霧反射,會產(chǎn)生大量的虛假信號。這通常會導(dǎo)致mie散射效應(yīng),因此,大部分發(fā)射光束不會返回掃描儀。
除了天氣,激光雷達(dá)系統(tǒng)可能被愚弄(故意地或故意地)以認(rèn)為物體存在是通過閃爍“燈”。根據(jù)2015年發(fā)表的論文,對安裝在自動駕駛汽車上的LIDAR系統(tǒng)閃爍簡單的激光指示器可能會使汽車的導(dǎo)航系統(tǒng)迷失方向,給人的印象是存在物體的地方?jīng)]有。這種缺陷,特別是在無人駕駛汽車的激光應(yīng)用中,引發(fā)了很多安全隱患,因?yàn)榻佘囌邿o需花很長時間就可以完善用于攻擊的原理。這還可能導(dǎo)致汽車突然停車的事故 。 。 strong》
要結(jié)束本文,我們可能應(yīng)該研究一下LIDAR可能非常適合您的項(xiàng)目的原因以及您應(yīng)該避免使用LIDAR的原因。
優(yōu)勢
1。高速準(zhǔn)確的數(shù)據(jù)采集
2。高穿透力
3。不受環(huán)境光強(qiáng)度的影響,可以在晚上或陽光下使用。
4。與其他方法相比,高分辨率成像。
5。沒有幾何失真
6。輕松與其他數(shù)據(jù)采集方法集成。
7。 LIDAR具有最低的人為依存性,在某些人為錯誤可能影響數(shù)據(jù)可靠性的應(yīng)用中非常有用。
缺點(diǎn)
1。激光雷達(dá)的成本使其在某些項(xiàng)目中顯得過高。最好將LIDAR描述為相對昂貴。
2。在大雨,大霧或大雪條件下,激光雷達(dá)系統(tǒng)的性能很差。
3。 LIDAR系統(tǒng)生成的大型數(shù)據(jù)集需要大量的計(jì)算資源來處理。
4。在湍流的水中應(yīng)用不可靠。
5。取決于所采用的波長,由于某些種類的LIDAR中發(fā)射的脈沖在某些高度下無效,因此LIDAR系統(tǒng)的性能會受到一定的限制。
LIDAR對于業(yè)余愛好者和制造商
由于激光雷達(dá)的成本,市場上的大多數(shù)激光雷達(dá)系統(tǒng)(如Velodyne激光雷達(dá))都用于工業(yè)應(yīng)用(將所有“非愛好者”應(yīng)用整合在一起) 。
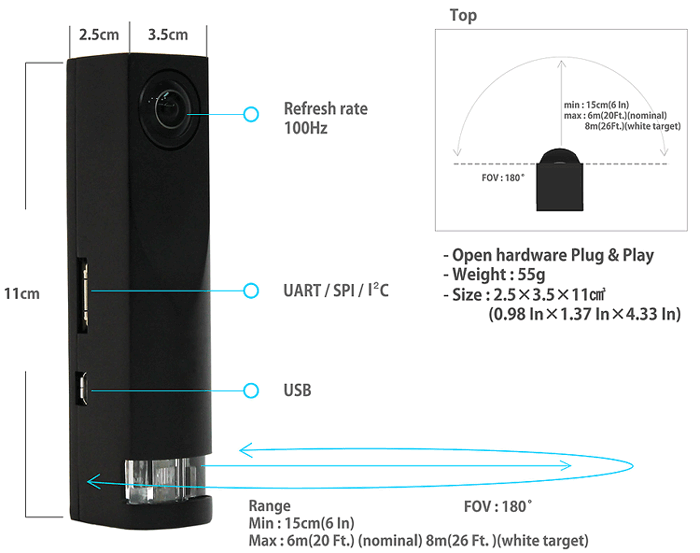
目前最接近“業(yè)余級” LIDAR系統(tǒng)的是 iLidar 固態(tài)LiDAR。 Hybo設(shè)計(jì)的傳感器。這是一個小型LiDAR系統(tǒng),能夠進(jìn)行3D映射(不旋轉(zhuǎn)傳感器),最大有效范圍為6米。該傳感器配備了一個USB端口以及一個UART/SPI/i2C端口,通過該端口可以在傳感器和微控制器之間建立通信。
iLidar旨在適應(yīng)所有人,并且與LiDAR相關(guān)的功能使其成為現(xiàn)實(shí)。對制造商具有吸引力。
責(zé)任編輯:wv
-
LIDAR
+關(guān)注
關(guān)注
10文章
328瀏覽量
29530
發(fā)布評論請先 登錄
相關(guān)推薦
超級電容電池的工作原理

輔助電源的工作原理
成像器件的工作原理是什么
串行接口的工作原理和結(jié)構(gòu)
VCO的工作原理是什么
驅(qū)動器的工作原理
什么是LiDAR?LiDAR技術(shù)的新時代 前景廣闊未來可期
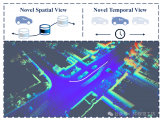
LiDAR4D:基于時空新穎的LiDAR視角合成框架
激光雷達(dá)LIDAR基本工作原理


Valeo為何堅(jiān)守著LiDAR?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論