 汽車瞬間撞樹,現場慘烈!主動剎車系統為啥不喊停?!
汽車瞬間撞樹,現場慘烈!主動剎車系統為啥不喊停?!
近日,有本田車主在車友群里分享說,他剛提車不久的皓影幻夜版,還沒開過隱就給撞壞了。這是怎么回事呢?原來是他停車剛起步時,想測試一下這車的加速性能,于是就一腳踩下去了,但中途的時候,當他伸手去副駕駛撿東西時,皓影就一頭撞電線桿上了,結果慘不忍睹。萬幸的是,人沒事!
圖:皓影撞電線桿后的照片。
據說,這是皓影自去年11月上市以來的首次較大事故。在皓影上市之初,主動安全配置可是它的主要賣點之一。據廣汽本田官網顯示,皓影幻夜黑標配了Honda SENSING安全超感技術的,該技術包括了ACC主動巡航控制系統、LKAS車道保持輔助系統、RDM車道偏移抑制系統、TSR交通標識智能識別系統、PA自動泊車輔助系統、CMBS碰撞緩解制動系統(這也就是常說的主動剎車系統)等等。
圖:皓影撞電線桿后前臉損毀情況。
圖:皓影官方正臉圖。
按理說,皓影配備了主動剎車系統,汽車在撞上電線杠之前就應該會檢測到,并主動剎車才對啊,為什么主動剎車系統沒有起作用呢?
其實,本田的這個主動剎車系統,也就是“CMBS碰撞緩解制動系統”(簡稱CMBS系統),它的工作原理是通過微波雷達和單眼攝像機,感應并識別前方車輛、對向車輛和行人(障礙物)。當車輛與障礙物可能發生碰撞危險時,系統先是通過三次警示,以體感形式再次提醒駕駛者對車輛進行操作。如果司機還是沒有采取制動動作,系統會實施強力制動,以輔助駕駛者規避碰撞及減輕傷害。
根據本田官網的操作手冊顯示,該系統的激活條件是當車輛于前方探測到的車輛或者行人的速度差約為5km/h及以上,并且有發生碰撞的可能時,或者當車速約為100km/h或更低,且有與前方探測到的迎面車輛或行人發生碰撞的可能性時。
系統激活后,對于可能發生的碰撞有三個警報階段。當然,這取決于環境條件,CMBS系統可以跳過所有的階段,直接觸發最后的階段。
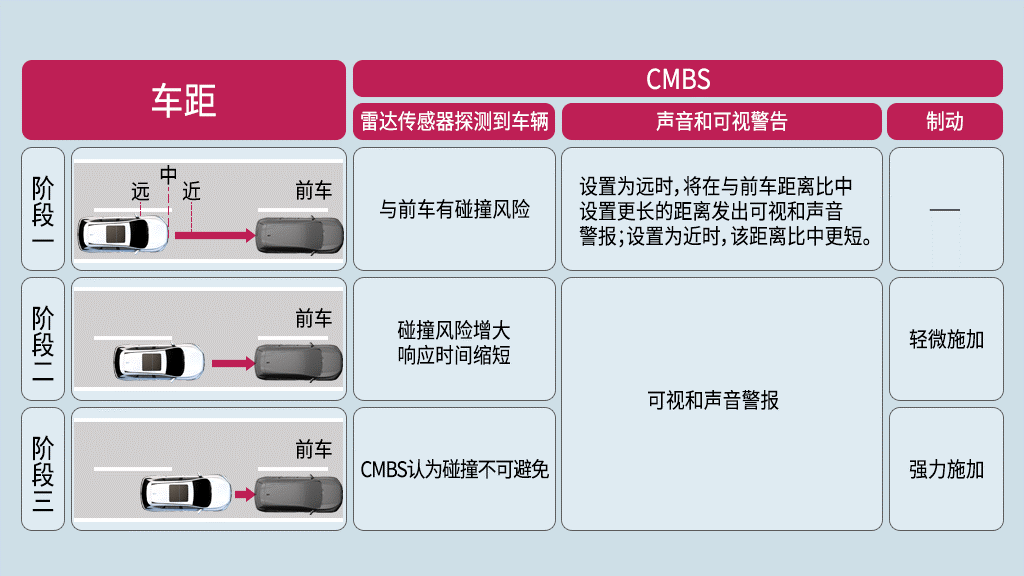
圖:本田CMBS系統的報警階段。
但同時,在最后,本田也給出了一個重要的安全提醒:CMBS系統的設計有助于減輕不可避免的碰撞的嚴重性,但它不會預防碰撞,也不會自動停止車輛,駕駛員仍然需要根據駕駛條件適時操作制動踏板和方向盤。
那這個系統有沒有什么限制呢?據網友查詢到的資料顯示,它其實是有不少限制的,比如當其他車輛或者行人突然從您前方穿過;本車和前方車輛或行人之間的距離過短;當您在彎曲、蜿蜒或起伏的道路上行駛時,傳感器很難正確探測到前方車輛等等。
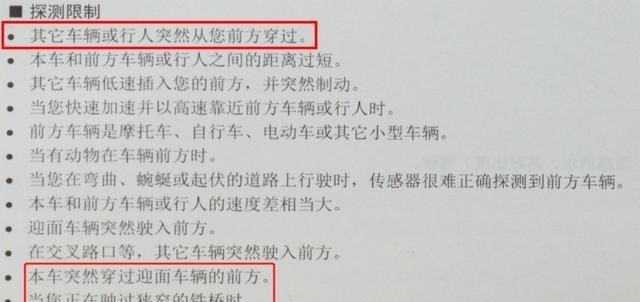
由車主提供的照片可以看出來,應該是在鄉間的小路上,路旁有許多的電線桿和數,或許是駕駛員突然側身去拿副駕駛上的東西時,車輛開始偏離行駛軌跡,然后撞上電線桿,這個距離太短,傳感器來不及識別障礙物,也就無法做出判斷了。
對此,海外一位從事人工智能研究的專家告訴<電子發燒友>,這還可能是因為ISO26262的功能安全性做得不夠造成的。
同時,他也對當前的無人駕駛發展發表了自己的看法,在他看來,現在的無人駕駛硬件做的是有問題的,必須要做一個專用的硬件來計算無人駕駛算法。
現在的自動駕駛主要包括三個模塊:
一個模塊接收傳感器輸入。一般常用的傳感器是定位 GPS、激光雷達、攝像頭和聲納。激光雷達和聲納系統是躲避障礙物的兩道屏障,而攝像頭主要用來收集路況信息,比如行人、交通指示牌、行車道等。
第二個模塊根據傳感器數據分析路況并作出行駛決策,主要包含目標定位、識別和跟蹤這三個任務,所要作出的決策主要是行車路線和躲避障礙。目前常用的算法是深度神經網絡 DNN,具體可以分為處理靜態任務的卷積神經網絡 CNN 和處理與時間相關任務的 RNN/LSTM。
第三個模塊提供與云平臺的交互。因為車載計算系統的計算能力和存儲能力有限,需要通過云端實現海量數據存儲、復雜機器學習模型訓練和高精度地圖繪制。
在這位專家看來,CNN就是一個黑盒子,無人駕駛公司還需要對不同的物體進行標識,然后再讓CNN學習,而純視覺的CNN在森林很容易失效,例如森林遮擋陽光形成的光斑就很容易讓AI出錯。
而如果是L5級無人駕駛,就自然會面臨雨天、強光、大陰影、大拐彎等極端的條件,對AI來說,這些極端條件需要兼顧,但如果兼容了這些極端條件的話,常用的一些情況就會受到影響。如何解決其實是一個非常棘手的問題。
當然,他也指出,如果使用soDLA來做視覺/AI部分,再加上一個擴展加速器cora,或許是一個不錯的解決辦法。cora主要用來解決定位和控制算法問題,它帶了一個可配置的卡曼濾波加速器,可用來2D定位,并將精確信息放在地圖上,地圖給出行走路線,再用cora自帶的PID/MPC控制加速器,車輛就能滿足高速行駛下的安全性了。
最后,他還吐槽說,無人駕駛應該是一個循序漸進的技術,可資本老是想加速推進,弄得現在無人駕駛現在虛火一把。他還是希望無人駕駛能夠按照技術發展周期繼續走下去。
-
傳感器
+關注
關注
2553文章
51407瀏覽量
756645 -
人工智能
+關注
關注
1796文章
47683瀏覽量
240311 -
無人駕駛
+關注
關注
98文章
4090瀏覽量
121015
發布評論請先 登錄
相關推薦
Pamcrash在飛機鳥撞分析中的應用

電動汽車高壓主動放電幾種方式

汽車制動系統常見問題及解決方案
汽車制動系統如何提升剎車性能
電源切換的瞬間會不會瞬間斷電
主動均衡技術的優點分析
無人機主動防御系統有哪些
無人機主動防御系統安裝需要備案嗎
變頻器剎車電阻不同功率如何匹配
原理圖設計里兩顆重要的樹(國產EDA)
小米SU7 Max制動系統搭載四活塞固定卡鉗及NAO剎車片
極狐阿爾法S先行版新增全向防碰撞系統與前向主動安全功能
守護橋梁安全,預警船撞風險——鐳神智能激光雷達智慧航運系統解決方案






 工商網監
工商網監
評論