 基于雙層自學習可拓控制結構的可拓控制器的改進設計及仿真分析
基于雙層自學習可拓控制結構的可拓控制器的改進設計及仿真分析
引 言
可拓控制是在可拓學的基礎上提出的從信息轉換的角度來處理控制問題的理論與方法。可拓控制以控制輸入信息的合格度(關聯度)作為確定控制輸出校正量的依據,通過可拓變換,使被控信息轉換到合格的范圍內,解決控制系統中不可控和需要控制之間的矛盾。文獻提出了一種可拓控制器的設計方法,并探討了特征模式劃分與關聯度計算等問題;文獻提出了包括上層可拓控制器和基本可拓控制器的雙層自學習可拓控制結構。
該文在上述研究的基礎上,提出了一種改進的可拓控制算法,并對其進行仿真研究。研究結果表明,其算法具有簡單、快速等優點。
1、可拓控制器
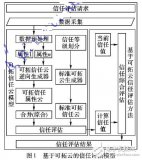
可拓控制方法是將可拓集合論的研究事物的轉化關系理論與方法應用到控制問題研究上,通過將不合格范圍內的控制變量轉化到合格范圍內,從而使控制效果從不滿意轉化到滿意。基于這種思想,建立了如圖1所示的可拓控制器的結構框圖。
圖1所示即為包含上層可拓控制器和基本可拓控制器的雙層自學習可拓控制器的結構圖。由圖可知,特征量選取,特征模式劃分,關聯度計算,測度模式劃分,控制輸出5部分組成了下層的基本可拓控制器,其主要完成基本的控制功能。上層可拓控制器主要依靠人們的經驗和知識對參數進行整定,作為基本可拓控制器的補充和完善,完成對基本控制的優化,保證良好的控制效果,同時反映可拓控制所強調的矛盾轉化問題。
1.1 可拓控制的基本概念
首先介紹與可拓控制相關的基本概念:
(1)特征量:表征系統運動狀態的變量,記為C;
(2)特征狀態:由特征量C描述的系統狀態,記為S;
(3)經典域:由控制指標決定的系統特征狀態的取值范圍;
(4)可拓域:控制器輸出隨系統特征狀態可調整到合格范圍內的特征狀態的取值范圍;
(5)非域:系統輸出不能被調整到合格范圍內的特征狀態的取值范圍;
(6)可拓集合:可拓域內建立的關于特征狀態的集合;
(7)特征狀態關聯度:當前的特征狀態與系統控制目標可拓集合之間的關系,記為K(s)。
將其分為K(s)≤一1,一1≤K(s)《O,K(s)≥O三種情況進行討論,可拓控制主要研究一1≤K(s)≤O的情況;
(8)特征模式:由特征量表示系統運動狀態的典型模式,記為:φi=fi(C1,C2,…,Cn),i=1,2,…,r。其中:φ表示第i個特征模式;fi表示關于φi,的模式劃分;
(9)測度模式:根據特征狀態關聯度劃分的模式,記為Mi。
1.2 基本可拓控制算法
這里參照文獻采用偏差e和偏差微分e作為系統的特征量,并將特征狀態劃分為8個特征模式。假定被控對象的偏差和偏差微分的容許范圍分別為eom和eom,系統可調的最大偏差和偏差微分分別為em和em關于特征狀態S(e,e)的可拓集合可用圖2表示,其中陰影部分代表經典域。
設特征平面-e占的原點為S0(0,O),記定義平面內任意一點到原點的距離為稱為狀態距,則有D0=M0,Dm=M-1;定義特征平面e-e上任意一點S。(e,e)的關聯度為:
其中:是由系統所處的特征模式決定的;X表示經典域。
特征狀態關聯度K(s)表明了系統特征狀態S與特征狀態(e,e)的可拓集合的關聯程度,由此測度模式的劃分,即關聯度在[一1,O]范圍內的特征狀態的劃分可表示如下:
(1)測度模式M1,對應的特征狀態處于經典控制域內。
(2)測度模式M2,對應的特征狀態處于可拓域內。
(2)測度模式M3,對應的特征狀態處于非域內。
可拓控制器的輸出如下:
其中:u(t),u(t一1)分別為控制器當前時刻和前一時刻的輸出;y(t)為當前時刻被控量的采樣值;k為過程的靜態增益;Kci為第M2i個測度模式的控制系數;K(s)為特征狀態S的關聯度;sgn(e)為偏差的符號函數,取法如下:
ε為小范圍修正量,用來消除擾動和過程增益的不準確性,取法如下:
其中:Ki,K。為適當常數;占為小正數。
1.3 改進的可拓控制算法
由上述可拓控制算法可知,進行可拓控制時需要整定k,Kci,Ki,Kp,δ等參數。其整定過程依靠人們的經驗知識,因此整定比較困難,尤其是Kci的整定直接影響到可拓控制效果的好壞。另一方面,通過仿真實驗發現,小范圍修正量ξ的整定效果不明顯。因此,提出改進的控制算法,采用狀態距來代替原有參數的整定。
(1)測度模式M1。經典控制域在完全可控的范圍內,而可拓控制主要是在可拓域內發揮作用,因此在此范圍內采用PID控制算法,旨在補償經典域內可拓控制效果不理想的缺點。此時,控制器的輸出如下:
其中:e(t),u(t)分別為PID控制器的輸入和輸出;KP,KI,KD三個參數的整定采用Ziegler一Nichols方法。為方便起見,此時記u(t)=u(PID)。
(2)測度模式M2。采用改進的可拓控制算法,控制器的輸出為:
u(t)=y(t)/k一K(s)psgn(e)+D(s)sgn(e)
其中:u(t),u(t一1)分別為控制器當前時刻和前一時刻的輸出;y(t)為當前時刻被控量的采樣值;k為過程的靜態增益;Kci為第M2i個測度模式的控制系數;K(s)為特征狀態S的關聯度;D(s)為狀態距;戶為修正因數;sgn(e)為偏差的符號函數,與上述取法相同。
(3)測度模式M3測度模式M3對應的特征狀態較大地偏離經典域,處于非域范圍內,此時控制器的輸出取幅值。
綜上所述,可拓控制器的輸出算法如下:
2、 可拓控制算法的仿真研究
在該仿真部分,將采用相應的線性對象、延遲對象和非線性對象對改進的可拓控制算法進行仿真試驗,并與傳統的可拓控制算法和PID控制算法進行比較。其中,PID控制參數的選取均采用Ziegler-Nichols方法整定后的參數,輸入信號為單位階躍信號,仿真時間為500 s。
2.1 線性對象
取線性對象的傳遞函數為:G(s)=1/(10s+1)4,則控制效果如圖3所示。
圖3中,PID表示PID控制輸出,EC表示傳統的可拓控制算法輸出,IEc表示改進后的可拓控制算法輸出。
由圖3中曲線可知,在誤差允許范圍內,PID控制、EC和IEC均能收斂,從而達到較滿意的控制效果。與其他兩種控制方法相比,IEC不但能更快地收斂于穩定值,而且超調量也比較小。
2.2 延遲對象
取延遲對象傳遞函數為:G(s)=e-10s/(5s+1)4,則控制效果如圖4所示。
由4圖中曲線可知,在誤差允許范圍內,PID控制、EC和IEC均能收斂從而達到較滿意的控制效果。與PID控制相比,IEC能更快地收斂于穩定值;與EC相比,除了能更快地收斂外,IEC的波動較小、超調量幾乎為0。
2.3 非線性對象
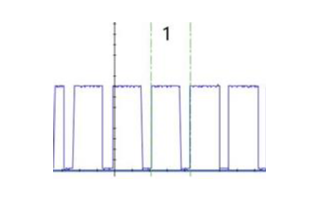
取非線性對象為開環傳遞函數G(s)=1/(10s+1)4的單位反饋輸出的平方,控制效果如圖5所示。
由圖5中曲線可知,在誤差允許范圍內,PID控制、EC和IEc均能收斂從而達到較滿意的控制效果。與PID控制相比,IEc能更快地收斂于穩定值;與EC相比,除了能更快的收斂外,IEc的波動和超調量均較小。
3、 結 語
從仿真研究來看,改進的可拓控制算法具有參數整定簡單、響應快速且穩定等特點。并應用于線性對象、延遲對象和非線性對象進行仿真研究,驗證該算法的可行性和有效性。結果證明了可拓控制具有良好的控制品質和較好的自學習能力,有較好的發展前景。
責任編輯:gt
-
控制器
+關注
關注
112文章
16446瀏覽量
179456 -
PID
+關注
關注
35文章
1473瀏覽量
85825
發布評論請先 登錄
相關推薦
STM32之紅外遙控信號自學習實現
自學習空調控制器
【樂拓USB示波器免費試用連載】A_基于樂拓示波器調試CAN通信產品過程
如何讓電機自學習?
基于可編程控制器的模糊自學習鍋爐燃燒控制系統
氧樂果合成反應溫度的模糊自學習控制方法
自學習紅外遙控器的設計與實現
自學習熱轉印機控制系統設計

基于可拓云的網絡信任評估模型





 工商網監
工商網監
評論