 關于機器人電柜內的硬件故障的另一解法嘗試
關于機器人電柜內的硬件故障的另一解法嘗試
之前有遇到過 很多關于機器人電柜內的硬件故障,我思來想去,覺得除了對硬件指示 燈 和KCP報警提示外還有沒有更有效的方法呢,畢竟KCP的提示不是很準確.有時 指示燈也能誤導人 .

例如:
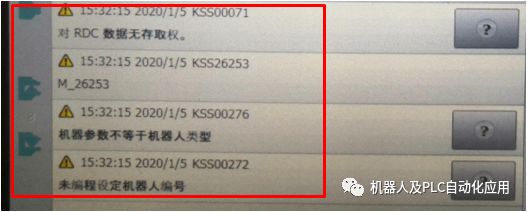
機器人Smarpad信息窗口報警“對RDC數據無存取權”、 “機器人參數不等于機器人類型”、 “未編程設定機器人編號”,更換RDC板卡及電纜、CCU無果,更換控制柜后正常。
KSP(T2)為網絡物理連接末站,故驅動總線LED 組出口狀態指示燈為熄滅狀態,當將其連接至KSP (T1)位置時,出口LED依然不亮.最后他們認為是T2 壞了換了就好了.

這種故障很邪門吧.
于是我在想硬件還有什么更好的處理方法嗎?>或思路能更多些嗎,不是通過換或者試.下面我只說一下另一思路大家可以試下.
KCB網絡

KSB網絡

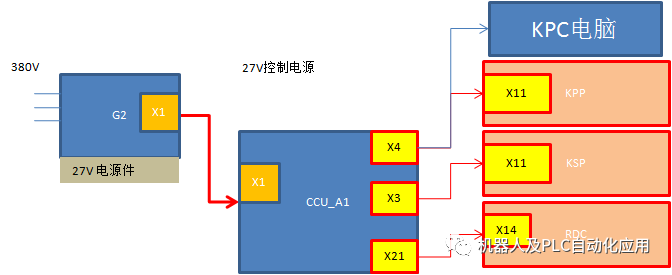
低壓電源件用于對下列組件進行供電:,電機制動裝置, 外圍設備,控制系統電腦,KSP's,KPP,蓄電池, 控制柜風扇, RDC ,smartPAD.
那么有沒有對各個硬件診斷的地東西呢? ‘診斷監視器‘
菜單路徑:KUKA鍵 > 診斷> 診斷監視器
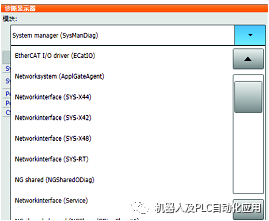

CIB - 控制柜接口板的監控

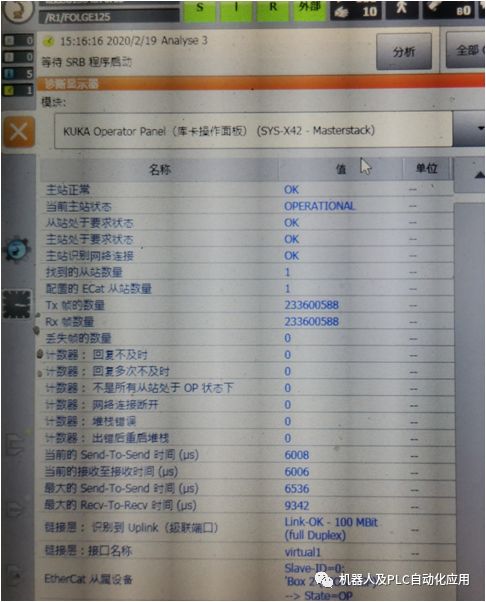
X42庫卡 smartPAD操作面板接口

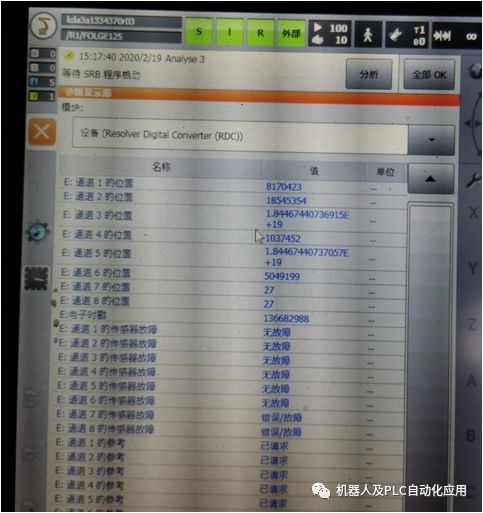
RDC的監控

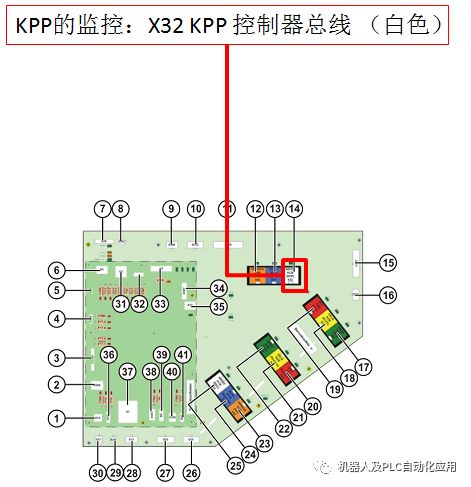
KPP的監控

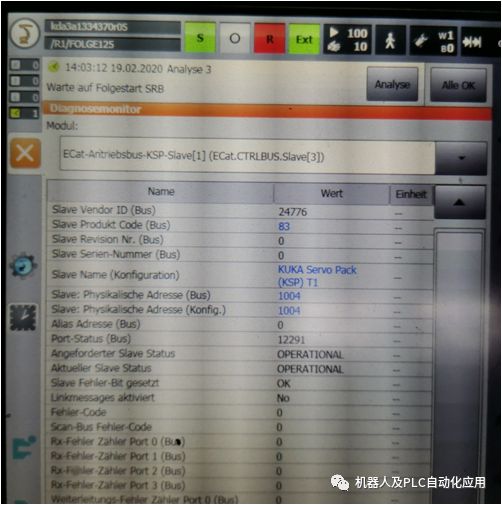
KSP的監控
我只是提出了診斷方法的另一種判斷方法。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28642瀏覽量
208423 -
總線
+關注
關注
10文章
2903瀏覽量
88397 -
KUKA
+關注
關注
3文章
217瀏覽量
16607
原文標題:KUKA硬件故障診斷的另一解法嘗試
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Atlas轉型電驅,純電+AI正在加速通用人形機器人落地
人形機器人新版Atlas。這一事件標志著波士頓人形機器人液壓傳動路線向純電的徹底轉變。 ? 同時,在四月末,北京人形機器人創新中心在北京經開

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
,一次生成深度信息。
自主機器人定位任務的本質是對機器人自身狀態的估計問題,包括位置,朝向,速度等問題。
路徑規劃旨在找到從起點到目標區域的路徑,確保路徑的可行性和最優性。路徑規劃方法包括變分方法,圖搜
發表于 01-04 19:22
《具身智能機器人系統》第10-13章閱讀心得之具身智能機器人計算挑戰
取特征點,涉及大量像素級比較運算;優化機器人位姿,需要迭代求解大規模矩陣方程。書中提出了模塊化的硬件加速方案,闡述了如何以因子圖為通用模版,以求解非線性優化問題為橋梁,面向多種機器人應用進行加速。
第11
發表于 01-04 01:15
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
。
多模態融合的創新與突破
機器人控制技術的另一個重要突破在于多模態大模型的應用。相比于僅通過文字進行人機交互的傳統方法,現代機器人能夠融合視覺、聲音、定位等多模態輸入信息,為任務執行提供更加全面的感知
發表于 12-29 23:04
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
物理交互納入智能系統的核心要素。
第3章是探討機器人計算系統。這一章節詳細闡述了自主機器人的軟硬件架構。計算系統需要滿足機器人任務對算法的精
發表于 12-19 22:26
焊接機器人常見故障及排查
的跡象。 檢查緊固件: 確保所有緊固件都已正確擰緊,沒有松動。 檢查過載保護: 如果機器人有過載保護,檢查是否因為過載而停止工作。 2. 電氣故障 故障現象: 機器人無法啟動、電機不工
“0元購”智元靈犀X1機器人,軟硬件全套圖紙和代碼全公開!資料免費下載!
和開發指南分別上線GitHub和智元機器人官網,“一站式”開源軟硬件全套圖紙和代碼,大幅降低了機器人技術開發的門檻,推動了全球機器人技術的普
發表于 10-25 15:20
FMEA在工業機器人故障預防中的應用
在工業自動化領域,FMEA(Failure Mode and Effects Analysis)不僅是一種分析方法,更是提升產品可靠性和安全性的關鍵工具。通過對工業機器人可能發生的各種故障模式進行
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優勢:語言
發表于 07-05 08:52
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
、Zynq和攝像頭為硬件基礎,搭建了六自由度機器人視覺平臺。
(2)設計了基于 FPGA的視覺檢測方案。利用 西林提供的 HLS和CV庫對從攝像頭采集到的像素流進行實時處理,并設計了一套識別物塊坐標
發表于 05-29 16:17
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
區域,導致清潔不徹底;有些機器人在遇到特殊情況時可能無法做出正確的反應,甚至出現故障。此外,掃地機器人的價格也是影響客戶體驗的一個重要因素,雖然隨著技術的成熟和市場競爭的加劇,價格已經
發表于 05-05 15:03





 工商網監
工商網監
評論