") 8.3安全機器人---抱閘測試解析
8.3安全機器人---抱閘測試解析
每個機器人軸都有一個集成在電動機中的保持制動器。制動測試檢查低速和當(dāng)前溫度下的每個制動器的制動扭矩是否足夠高。是否超過某個最小值。各個軸的最小值存儲在機床數(shù)據(jù)中。(制動測試不能確定制動扭矩的絕對值。)
如果制動測試處于活動狀態(tài),則以下事件要求進(jìn)行制動測試:
1.外部輸入$ BRAKETEST_REQ_EX,例如 B.來自PLC(外部請求)
2.機器人控制從冷啟動開始(內(nèi)部要求)
3.制動測試周期時間已到期(內(nèi)部請求)
循環(huán)時間為46小時。當(dāng)驅(qū)動器控制了總共46個小時后,它就失效了。然后,機器人控制器請求進(jìn)行制動測試并輸出以下消息:需要進(jìn)行制動測試。機器人可以再移動2個小時。然后它停止,并且機器人控制器發(fā)出以下確認(rèn)消息:未遵守制動測試請求的測試周期。確認(rèn)后,機器人可以再移動2個小時。
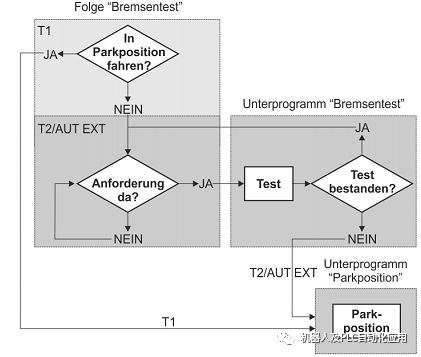
必須為制動測試創(chuàng)建以下程序。
1.遵循“剎車測試”
2.“制動測試”子程序
3.“停車位置”子程序
進(jìn)行制動測試的前提條件是機器人處于工作溫度下。正常運行約1小時后就是這種情況。可以通過以下方式啟動制動測試:
自動控制
為此,在應(yīng)用程序中包括“制動測試”序列,以便循環(huán)調(diào)用它。如果要求進(jìn)行制動測試,程序?qū)⒆R別出該信息并開始進(jìn)行制動測試。
手動控制
為此,請手動啟動“制動測試”序列。如果要求進(jìn)行制動測試,程序?qū)⒆R別出該信息并開始進(jìn)行制動測試。
制動測試的程序順序取決于運行模式:
1.如果在操作模式T1中啟動了“制動測試”序列,則可以直接行駛到停車位置。
2.無法在T1模式下啟動制動測試。如果要進(jìn)行制動測試而不是行駛至停車位置,請切換至運行模式T2。
制動測試一個接一個地檢查所有制動器。
1.機器人加速到定義的速度。(速度不會受到用戶的影響。)
2.當(dāng)機器人達(dá)到速度時,將應(yīng)用制動,并且該制動過程的結(jié)果將顯示在消息窗口中。
3.如果已識別出制動器故障,則可以重復(fù)進(jìn)行制動器測試,或者將機器人移至停車位置。
-
驅(qū)動器
+關(guān)注
關(guān)注
53文章
8272瀏覽量
147075 -
機器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208443
原文標(biāo)題:8.3安全機器人---抱閘測試解析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
《具身智能機器人系統(tǒng)》第10-13章閱讀心得之具身智能機器人計算挑戰(zhàn)
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
安全光柵在工業(yè)機器人上的應(yīng)用

開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
安防巡檢機器人:守護(hù)安全的智能衛(wèi)士

ROS讓機器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
Al大模型機器人
abb機器人安全區(qū)域需要系統(tǒng)有哪個選項
機器人舵機:關(guān)鍵要素解析與選擇指南






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論