 Xilinx快速傅立葉變換接口及仿真測試實驗設計
Xilinx快速傅立葉變換接口及仿真測試實驗設計
1 xilinx FFT IP介紹
Xilinx快速傅立葉變換(FFT IP)內核實現了Cooley-Tukey FFT算法,這是一種計算有效的方法,用于計算離散傅立葉變換(DFT)。
1)正向和反向復數FFT,運行時間可配置。
2)變換大小N = 2m,m = 3 – 16
3)數據采樣精度bx = 8 – 34
4)相位系數精度bw = 8 – 34
5)算術類型:
- °無標度(全精度)定點
- °定標定點
- °浮點數
6)定點或浮點接口
7)蝴蝶后舍入或截斷
8)Block RAM或分布式RAM,用于數據和相位因子存儲
9)可選的運行時可配置轉換點大小
10)可擴展的定點核心的運行時可配置擴展時間表
11)位/數字反轉或自然輸出順序
12)用于數字通信系統的可選循環前綴插入
13)四種架構在內核大小和轉換時間之間進行權衡
14)位精確的C模型和用于系統建模的MEX功能可供下載
15)有四種運算架構可供選擇
2 FFT IP接口介紹
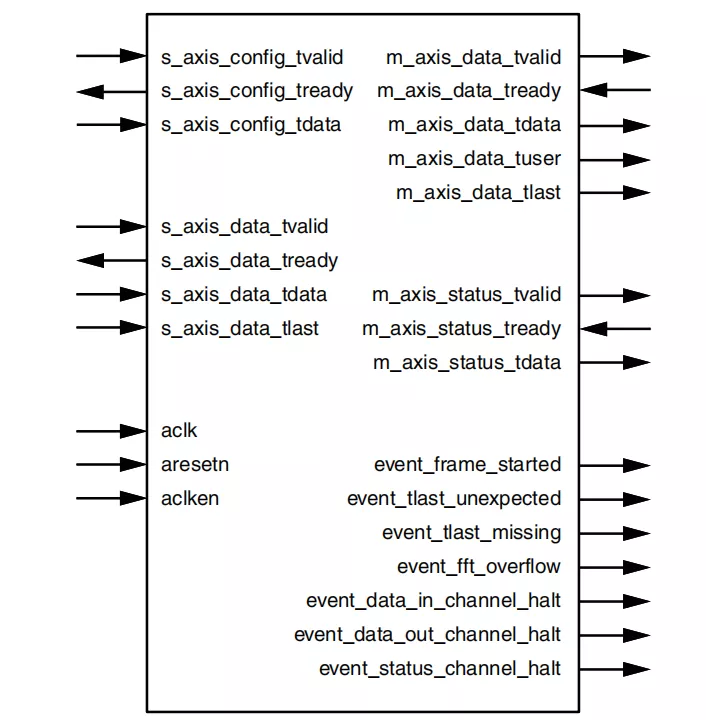
圖1 xilinx FFT IP
1)AXI4-Stream 介紹
AXI4-Stream接口帶來了標準化,并增強了Xilinx IP LogiCORE解決方案的互操作性。除了諸如aclk,acclken和aresetn之類的常規控制信號以及事件信號之外,到內核的所有輸入和輸出都通過AXI4-Stream通道進行傳輸。通道始終由TVALID和TDATA以及必填字段和可選字段(如TREADY,TUSER和TLAST)組成。TVALID和TREADY一起執行握手以傳輸消息,其中有效負載為TDATA,TUSER和TLAST。內核對包含在TDATA字段中的操作數進行運算,并將結果輸出到輸出通道的TDATA字段中。
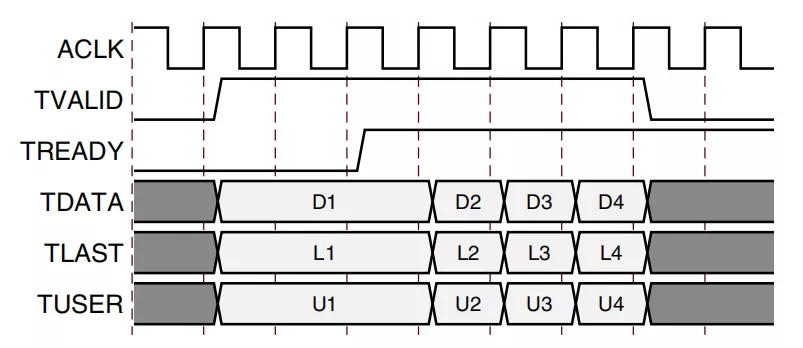
圖2 AXI4-Stream時序圖
圖2顯示了在AXI4-Stream通道中的數據傳輸。TVALID由通道的源(主)端驅動,而TREADY由接收器(從屬)驅動。TVALID指示有效負載字段(TDATA,TUSER和TLAST)中的值有效。TREADY表示從機已準備好接收數據。當一個周期中的TVALID和TREADY均為TRUE時,將發生傳輸。主機和從機分別為下一次傳輸分別設置TVALID和TREADY。
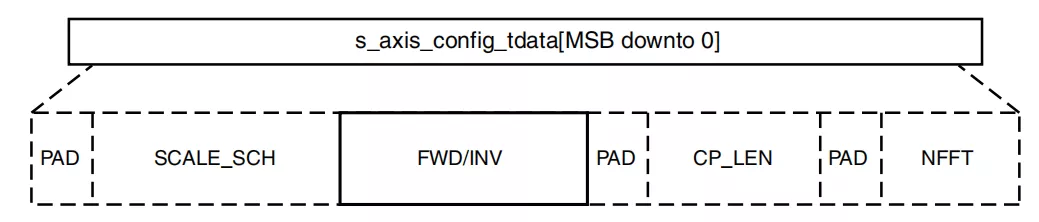
2)s_axis_config_tdata接口介紹
s_axis_config_tdata接口攜帶配置信息CP_LEN,FWD / INV,NFFT和SCALE_SCH。
NFFT(變換的點大小):NFFT可以是最大變換的大小或任何較小的點大小。例如,1024點FFT可以計算點大小1024、512、256等。NFFT的值為log2(點大小)。該字段僅在運行時可配置的轉換點大小時出現。
CP_LEN(循環前綴長度):從轉換結束起,在輸出整個轉換之前,最初作為循環前綴輸出的樣本數。CP_LEN可以是小于點大小的從零到一的任何數字。該字段僅在循環前綴插入時出現。
FWD_INV:指示是執行前向FFT變換還是逆向FFT變換(IFFT)。當FWD_INV = 1時,將計算前向變換。如果FWD_INV = 0,則計算逆變換。
SCALE_SCH伸縮時間表:對于突發I / O架構,伸縮時間表由每個階段的兩位指定,第一階段的伸縮由兩個LSB給出。縮放比例可以指定為3、2、1或0,代表要移位的位數。N = 1024,Radix-4 Burst I / O的示例縮放計劃是[1 0 2 3 2](從最后階段到第一階段排序)。對于N = 128,Radix-2 Burst I / O或Radix-2 Lite Burst I / O,一個可能的擴展時間表是[1 1 1 1 0 1 2](從最后階段到第一階段排序)。對于流水線I / O架構,從兩個LSB開始,每兩對Radix-2級用兩位指定擴展時間表。例如,N = 256的縮放時間表可以是[2 2 2 3]。當N不是4的冪時,最后一級的最大位增長為一位。例如,對于N = 512,[0 2 2 2 2]或[1 2 2 2 2]是有效的縮放時間表,但是[2 2 2 2 2]無效。對于此變換長度,SCALE_SCH的兩個MSB只能為00或01。此字段僅可用于縮放算法(非縮放,塊浮點或單精度浮點)。
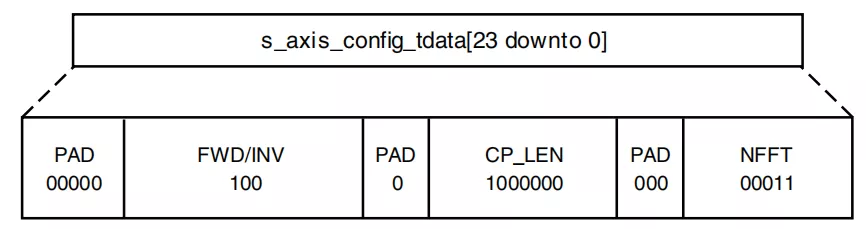
s_axis_config_tdata接口格式:
1.(可選)NFFT加填充
2.(可選)CP_LEN加填充
3.前轉/后轉
4.(可選)SCALE_SCH
舉例:
內核具有可配置的轉換大小,最大大小為128點,具有循環前綴插入和3個FFT通道。內核需要配置為執行8點變換,并在通道0和1上執行逆變換,并在通道2上執行前向變換。需要4點循環前綴。這些字段采用表中的值。
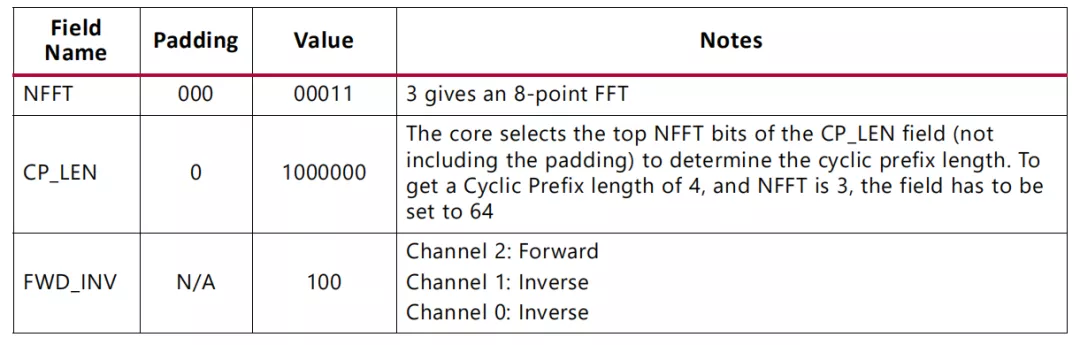
這給出了19位的向量長度。由于所有AXI通道必須與字節邊界對齊,因此需要5個填充位,從而s_axis_config_tdata的長度為24位。
3)相關標志信號

3 xilinx FFT IP的仿真測試
FFT的長度選擇8點,x輸入序列為x=[1,2,3,4,5,6,7,8];
Matlab驗證:
clear all close all clc x = [1,2,3,4,5,6,7,8]; y =fft(x,8); realy=real(y); imagy=imag(y);

Y的實部輸出為realy=[36,-4,-4,-4,-4,-4,-4,-4];
Y的虛部輸出為imagy=[0,9.6569,4,1.6569,0,-1.6569,-4,-9.6569];
FPGA仿真驗證:
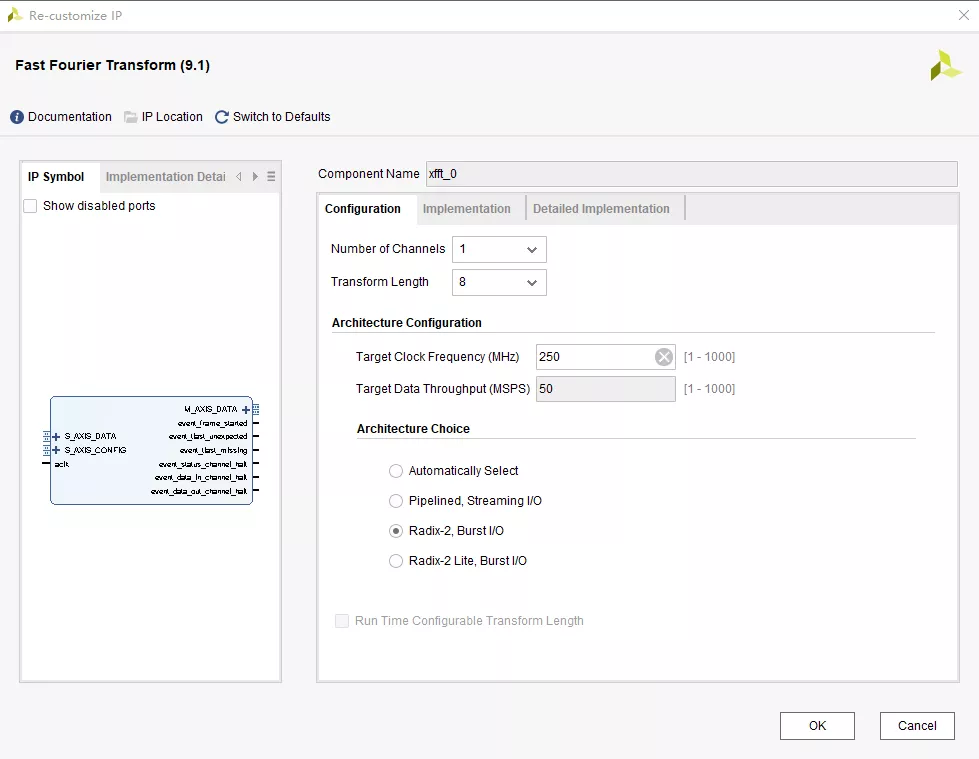
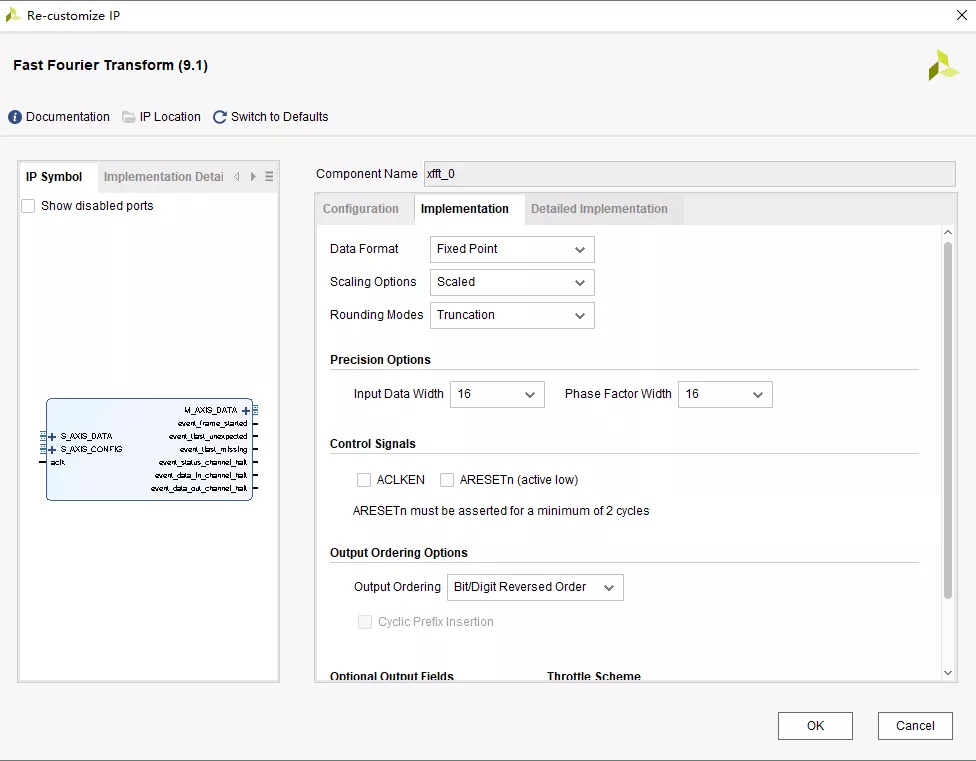
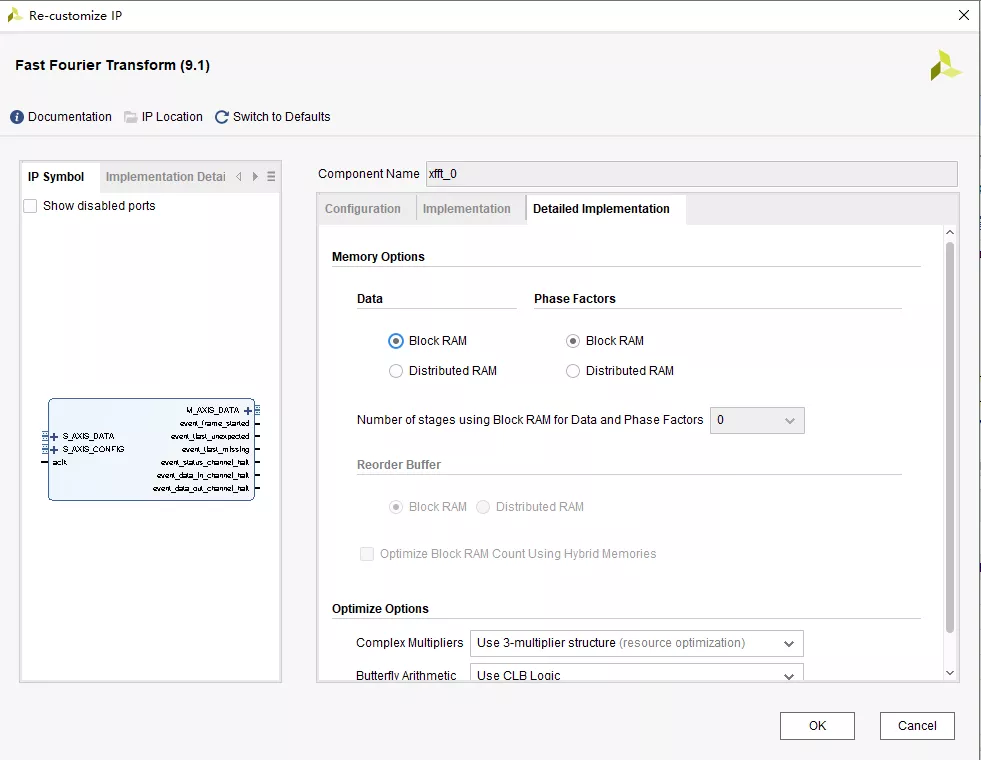
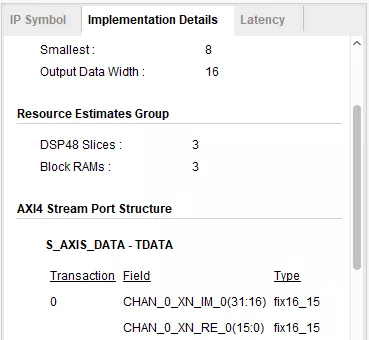
1)IP的設置
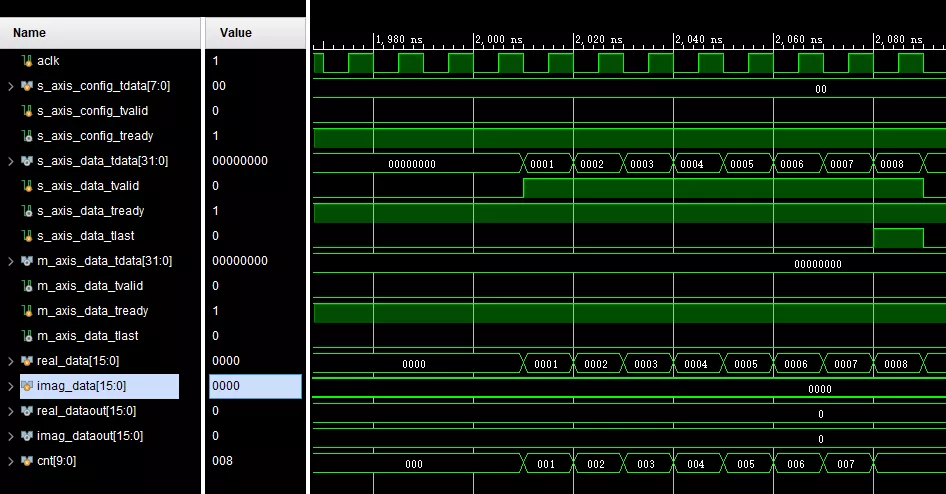
2)仿真頂層
`timescale 1ns / 1ps module tb_fft_top( ); reg aclk; reg [7 : 0] s_axis_config_tdata; reg s_axis_config_tvalid; wire s_axis_config_tready; wire [31 : 0] s_axis_data_tdata; reg s_axis_data_tvalid; wire s_axis_data_tready; reg s_axis_data_tlast; wire [31 : 0] m_axis_data_tdata; wire m_axis_data_tvalid; reg m_axis_data_tready; wire m_axis_data_tlast; reg [15:0] real_data; reg [15:0] imag_data; wire [15:0] real_dataout; wire [15:0] imag_dataout; reg [9:0] cnt; assign s_axis_data_tdata={real_data,imag_data}; assign real_dataout = m_axis_data_tdata[31:16]; assign imag_dataout = m_axis_data_tdata[15:0]; initial begin aclk = 0; s_axis_config_tdata=8'b0; s_axis_config_tvalid=1'b0; s_axis_data_tvalid=1'b0; s_axis_data_tlast=1'b0; real_data=16'd0; imag_data=16'd0; cnt = 0; m_axis_data_tready=1'b1; #1000; s_axis_config_tdata=8'b0000_0001; s_axis_config_tvalid=1'b1; #10; s_axis_config_tdata=8'b0000_0000; s_axis_config_tvalid=1'b0; #1000; repeat(8)begin s_axis_data_tvalid=1'b1; real_data=real_data+16'd1; cnt=cnt+1; if(cnt==8) s_axis_data_tlast=1'b1; #10; end s_axis_data_tvalid=1'b0; s_axis_data_tlast=1'b0; real_data=16'd0; #1000; $stop; end always #(5) aclk= ~aclk; fft_top Ufft_top( .aclk(aclk), // input wire aclk .s_axis_config_tdata(s_axis_config_tdata), // input wire [7 : 0] s_axis_config_tdata .s_axis_config_tvalid(s_axis_config_tvalid), // input wire s_axis_config_tvalid .s_axis_config_tready(s_axis_config_tready), // output wire s_axis_config_tready .s_axis_data_tdata(s_axis_data_tdata), // input wire [31 : 0] s_axis_data_tdata .s_axis_data_tvalid(s_axis_data_tvalid), // input wire s_axis_data_tvalid .s_axis_data_tready(s_axis_data_tready), // output wire s_axis_data_tready .s_axis_data_tlast(s_axis_data_tlast), // input wire s_axis_data_tlast .m_axis_data_tdata(m_axis_data_tdata), // output wire [31 : 0] m_axis_data_tdata .m_axis_data_tvalid(m_axis_data_tvalid), // output wire m_axis_data_tvalid .m_axis_data_tready(m_axis_data_tready), // input wire m_axis_data_tready .m_axis_data_tlast(m_axis_data_tlast) // output wire m_axis_data_tlast ); endmodule
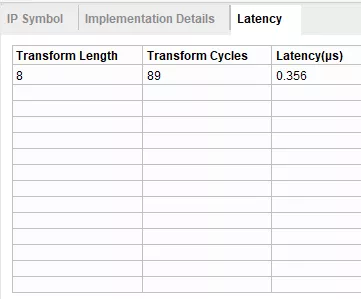
3)仿真結果
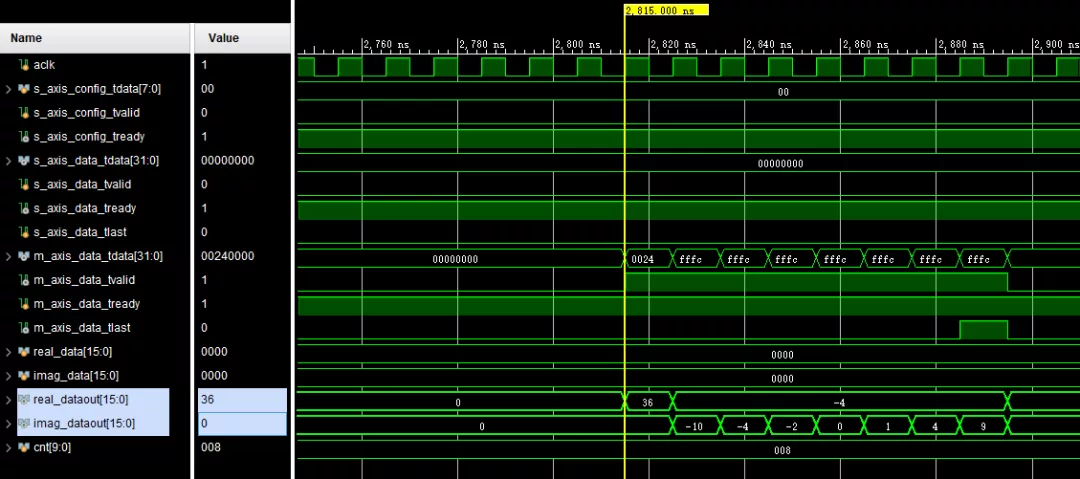
Vivado最終的仿真結果為
Real=[36,-4,-4,-4,-4,-4,-4,-4];
Imag=[0,-10,-4,-2,0,1,4,9];
與matlab的計算結果相比實部一樣,除虛部因為數據位的取舍問題以外,正數和負數部分順序相反。
編輯:hfy
-
Xilinx
+關注
關注
71文章
2171瀏覽量
122128 -
仿真
+關注
關注
50文章
4124瀏覽量
133987 -
快速傅立葉變換
+關注
關注
0文章
3瀏覽量
1472
發布評論請先 登錄
相關推薦
車聯網HIL仿真測試解決方案

智能座艙HIL仿真測試解決方案

智能駕駛HIL仿真測試解決方案

傅立葉變換在機器學習中的應用 常見傅立葉變換的誤區解析
傅立葉變換與時域信號的關系 傅立葉變換在音頻信號處理中的應用
傅立葉變換在圖像處理中的作用
傅立葉變換與拉普拉斯變換的區別
傅立葉變換的基本概念 傅立葉變換在信號處理中的應用
經典傅里葉變換與快速傅里葉變換的區別
EasyGo實時仿真丨PCS儲能變流器控制仿真應用
EasyGo實時仿真丨三相永磁同步電機開環實驗仿真應用
EasyGo實時仿真丨三相永磁同步電機開環實驗仿真應用






 工商網監
工商網監
評論