") 基于5G網絡的遠程控制協(xié)作機器人解決方案
基于5G網絡的遠程控制協(xié)作機器人解決方案
隨著老齡化等因素引起全球人力成本的持續(xù)上漲和勞動力短缺的問題,機器人代替?zhèn)鹘y(tǒng)人力已經成為不可改變的趨勢 [1] 。當前工業(yè)機器人已經大量使用于制造業(yè),尤其是在制造車間,工業(yè)機器人可以將一些重復性的人工勞動代替下來,節(jié)省人力。隨著技術的進步,各種機器人產品被研發(fā)出來,使得機器人產品開始擴展到其它行業(yè),并激發(fā)了巨大的市場空間。當前全球機器人市場飛速增長,2018年11月更新的IDC《全球機器人及無人機支出指南》 [2] 顯示,中國機器人和無人機及相關服務的支出額持續(xù)高速增長,到2022年將達到805.2億美元(約合5560億元人民幣),2018~2022年復合年增長率(CAGR)達到27%。中國是全球最大的機器人市場,預計到2022年將占全球總量的38%以上。
在一些傳統(tǒng)的危險行業(yè),比如地下管道遠程維修、山體滑坡遠程搶險、消防救人、排雷防爆等等,這些行業(yè)的操作環(huán)境惡劣,對人體危害大,這類工作可以使用機器人來執(zhí)行一些人類無法處理的任務。但是在一些高危行業(yè)中,每次遇到的情況復雜,不能完全復用原來的處理方法,無法使用統(tǒng)一智能化算法控制機器人獨立完成,需要遠程人為控制。
通過在機器人安裝攝像機等高清影像采集設備,將遠程場景的視覺傳輸給控制者,控制者實時監(jiān)控回傳過來的視覺圖像,佩戴傳感器并針對場景做出相應的操作行為,機器人通過“學習”控制者的動作并同步執(zhí)行,實現復雜行為的操作。即新動作不需要對機器人進行復雜的編程,而是機器人通過學習遠端人類動作即可完成既定動作,完成對應的危險性工作任務,保障人身安全。
在以上場景中,遠程控制機器人的實現有三個關鍵技術。一是高速數據傳輸速率:為了使得控制者能夠全面清晰實時地了解現場的情況,機器人佩戴高清攝像頭進行視頻數據采集,高清視頻的傳輸需要大帶寬保障視頻內容上行傳輸的流暢性與實時性;控制者佩戴的高清VR眼鏡或者MR眼鏡也需要大帶寬保障視頻內容下行傳輸的流暢性與實時性。二是低時延:人類控制操作者與受控機器人之間交互行為指令的實時下發(fā),這需要網絡具有低時延以保障控制者的行為可以通過傳感器,實時控制機器人。三是機器人與控制者之間通信網絡的快速便利部署,機器人和控制者之間如果使用有線網絡,雖然網絡時延和帶寬可以得到某種程度上的保證,但有線使得機器人的活動范圍受到限制,而且在機器人和控制者之間快速的部署網絡無法便捷實現。
如果使用Wi-Fi或者4G無線蜂窩網絡,由于Wi-Fi網絡的抗干擾性差,以及4G網絡的傳輸速率和時延的限制,現有無線網絡帶寬和時延無法穩(wěn)定地滿足一些高速率低時延場景。這些技術瓶頸使得遠程控制協(xié)作機器人在產業(yè)實際應用中遇到重重困難,至今還無法規(guī)模發(fā)展和部署。而5G網絡具有的大帶寬,低時延特性,正可以解決這些技術瓶頸,5G正為遠程控制協(xié)作機器人的產業(yè)發(fā)展帶來新的機遇。
1 5G網絡對于URLLC的支持
URLLC是5G網絡的三大特性之一。5G URLLC被業(yè)界廣泛認為可以應用于工業(yè)控制、工廠自動化、智能電網、設備、車聯網通訊、遠程手術等場景 [3-4] 。對于某個特定的業(yè)務,減少端到端的網絡傳輸時延主要因素有以下幾點構成:
(1)提高傳輸調度效率。根據3GPP的定義,在5G的無線空口設計中 [5] 引入了很多新技術以提高空口調度效率。比如采用更短的調度時間單位,采用更大的子載波間隔,更短的OFDM符號,引入了“迷你時隙(mini-slot)”傳輸機制等來實現低時延。
(2)減小中間傳輸節(jié)點數量,優(yōu)化網絡架構設計。從端到端業(yè)務角度,IP數據報文每經過一個邏輯節(jié)點或路由器的處理就會增加相應的傳輸時延及處理時延。盡量減少中間傳輸節(jié)點數量,使得服務器下沉到網絡邊緣,減少了數據傳輸路徑,有利于減少中間傳輸節(jié)點,有利于時延的縮短。5G新技術邊緣計算就是為了解決這一問題。
(3)優(yōu)化網絡傳輸協(xié)議。常用的TCP協(xié)議由于技術復雜性,當發(fā)生丟包或抖動時引入高時延,而UDP協(xié)議雖然高效但在可靠性方面存在不足,需要基于業(yè)務對時延的需求進行平衡考量以及進一步優(yōu)化。
2 遠程控制協(xié)作機器人解決方案
圖1是遠程控制機器人的系統(tǒng)組成圖:
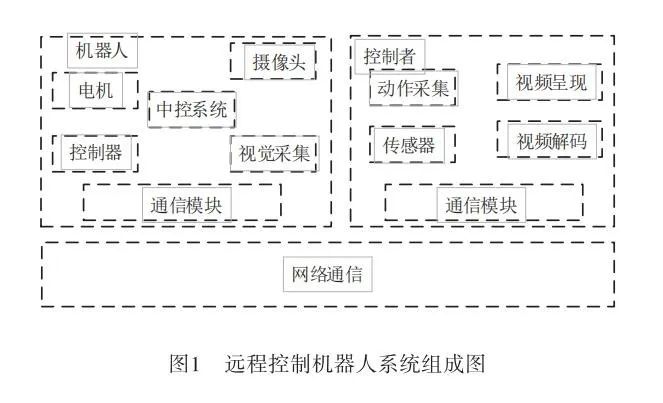
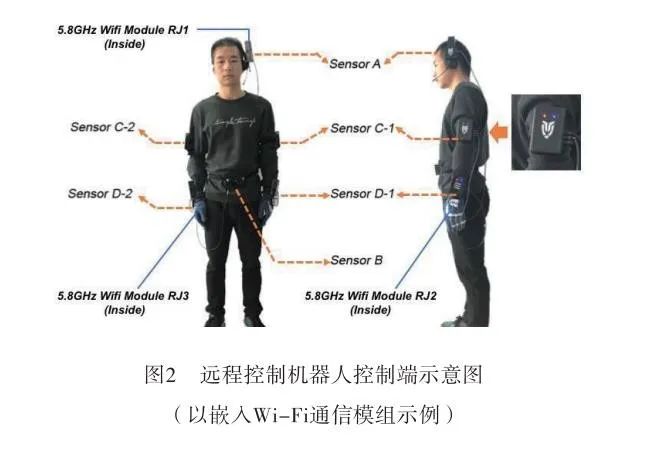
控制端操作者佩戴的傳感器由A、B、C、D這幾個傳感器組成,A、C、D傳感器實時計算和B的相對位置,每30?ms分別發(fā)送一次100?Byte左右的控制信息,控制者佩戴的傳感器和機器人分別安裝了通信模組,控制信息通過通信模組,通過網絡將控制信息傳輸給機器人身上的通信模組。機器人端的通信模組每隔30?ms可以接收到控制信息,并把控制信息傳到機器人各個關節(jié)電機,使機器人動作和操作者動作一致,控制者隨意做出手臂動作,穿戴的手臂傳感器把對應動作通過網絡已建立的鏈路傳送到機器人手臂控制器,機器人控制器根據接收到的傳感命令,控制手臂做出和控制者相同的動作。其對應關系如圖2所示:
3 不同網絡的性能對比測試
3.1 測試方案說明
為了驗證遠程控制協(xié)作機器人在不同網絡下的流暢度和性能對比,采用路邦ME2仿生機器人一代和路邦ME2仿生機器人可穿戴傳感器,通過在實驗室構造多種業(yè)務場景和多種網絡場景,對不同場景下的業(yè)務性能進行測試驗證和對比。遠程控制機器人對網絡需求主要是圖像傳輸系統(tǒng)和遠程控制指令傳輸兩個方面。由于當前版本的遠程控制機器人產品還沒有集成高清攝像設備,在本測試中,采用在機器人側進行數據灌包方式,模擬機器人實時采集和傳輸高清視頻內容。中國移動5G聯合創(chuàng)新中心發(fā)布的《5G云端機器人》 [6] 白皮書中提到機器人圖像傳輸系統(tǒng)對網絡需求,圖像傳輸系統(tǒng)需要的帶寬與圖像的分辨率和VR攝像頭路數有直接關系,單路25fps、1?080p分辨率需要4?Mb/s,當分辨率達到4k時,單路視頻的網絡帶寬需要至少16?Mb/s,目前高清VR至少需要2~3路攝像頭進行畫面拼接才能帶給用戶高浸入感的用戶感受。在本測試中,分別取20??Mb/s和80??Mb/s上行灌包,以模擬機器人實時采集和上傳高清和超高清視頻。
業(yè)務場景1:操作者與機器人之間僅指令交互;
業(yè)務場景2:操作者與機器人之間指令交互+20??Mb/s上行灌包;
業(yè)務場景3:操作者與機器人之間指令交互+80?Mb/s上行灌包。
這些場景分別在5G網絡和Wi-Fi網絡下進行測試,控制者隨意做出手臂動作,穿戴的手臂傳感器把對應動作通過5G網絡建立的鏈路傳送到機器人手臂控制器,機器人控制器根據接收到的傳感命令,控制手臂做出和控制者相同的動作。由于實驗室無線環(huán)境復雜,如果由路由器自動選擇信道,則會出現明顯的干擾,因此為了排除實驗室環(huán)境的干擾,Wi-Fi測試下分別采用固定信道和不固定信道的方式進行測試和對比。
網絡場景1:操作者與機器人之間通過Wi-Fi建立連接,不固定信道;
網絡場景2:操作者與機器人之間通過Wi-Fi建立連接,固定Wi-Fi信道;
網絡場景3:操作者與機器人之間通過5G網絡建立連接。
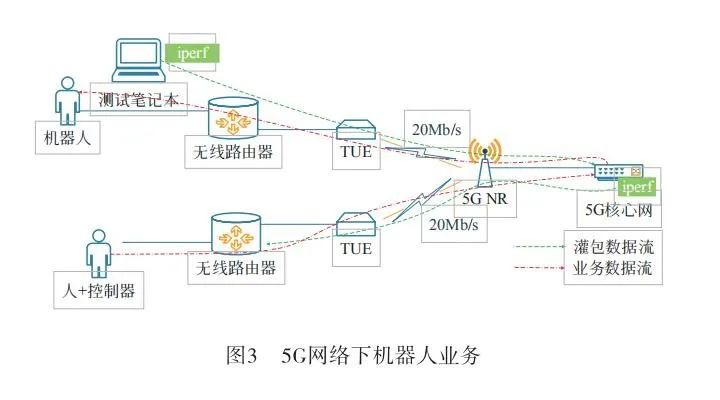
圖3為5G網絡下機器人業(yè)務示意圖:
3.2 性能評估與測試數據采集方法
操作者的行為通過穿戴的傳感器采集處理后,通過5G或者Wi-Fi網絡將傳感器產生的控制信息傳輸到機器人側,機器人根據指令做相應的動作。
端到端ping小包時延:由測試筆記本1設置包長64 Byte
ping對端的TUE(Test User Equipment),在測試筆記本1取10分鐘內ping時延的最大值、最小值、平均值(機器人的發(fā)包規(guī)律為每30 ms發(fā)送幾十到一百字節(jié)左右的數據,因此ping小包(64 Byte)時延可以作為近似評判控制信息發(fā)送的時延)。
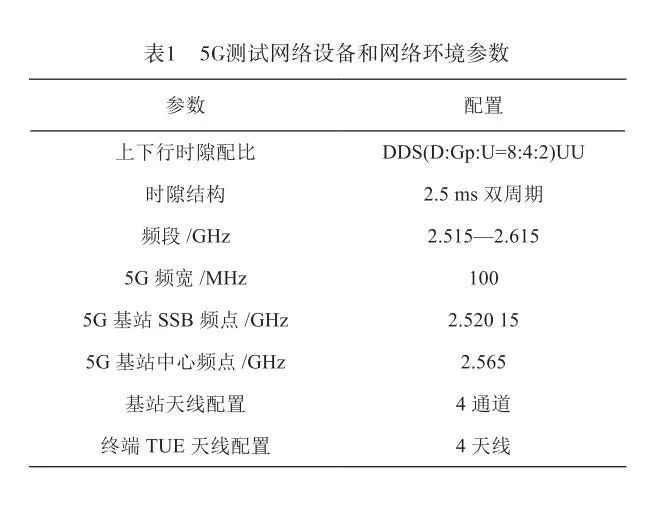
本測試中,5G NR基站(SA)和5G終端(Test User Equipment)信息如表1所示。
3.3 測試結果與分析
表2為不同網絡環(huán)境下不同業(yè)務的性能對比。
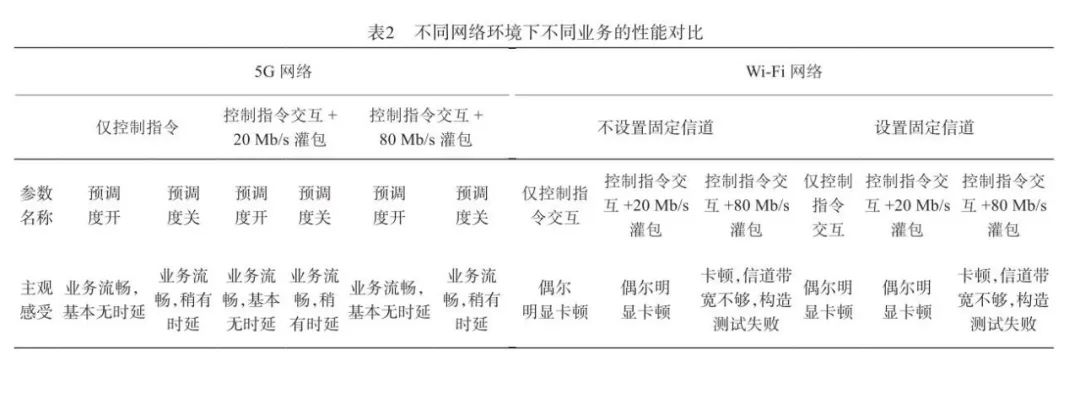
通過測試對比,可以有如下的觀察與結論:
(1)5G基站預調度開關對遠程控制機器人業(yè)務的時延有明顯影響。開啟后ping時延明顯變低,在預調度特性關閉的時候,ping小包時延超過100 ms,遠大于機器人發(fā)送數據的時間間隔,因此預調度關的場景下機器人會產生明顯時延。
結論1:打開預調度開關有利于時延敏感業(yè)務提升性能,但現網終端設備較多時,預調度可能會造成無線資源的浪費。現網部署時應全面考慮是否開啟基站預調度開關。
(2)通過灌包模擬遠程控制機器人采集4k或者8k視頻并上傳(20 Mb/s灌包或者80 Mb/s灌包),對機器人動作流暢度無明顯影響。
結論2:機器人使用高帶寬傳輸采集4k/8k高清80?Mb/s碼流視頻數據業(yè)務時,對遠程控制機器人操作并不影響機器人性能。
(3)Wi-Fi環(huán)境下易受到干擾。當不設置信道時,機器人收到信號干擾,導致機器人動作和控制者肉眼可見明顯動作不一致;而當設置固定信道時,由于Wi-Fi信道能力的限制,灌包只能達到40 Mb/s,無法滿足未來多路高清視頻的傳輸。
結論3:5G網絡無論時延還是帶寬穩(wěn)定性都能夠穩(wěn)定地支撐基于4k或者8k高清視頻采集的遠程控制機器人對網絡傳輸資源的要求。遠程控制機器人設備需要加快和5G模組結合的開發(fā),直接使用5G網絡提供的低時延、高可靠網絡進行通信,完成機器人遠程控制。
(4)此應用中,控制者的一個動作指令傳輸到機器人進行反應,端到端時延的環(huán)節(jié)分解如下:
1)每個傳感器計算自己與傳感器B的相對位置,處理時延T1;
2)每個傳感器將自己位置信息每30 ms為間隔,發(fā)給控制者身上的通信模組C,傳輸時延T2+30 ms;
3)通信模組C將控制信令通過5G網絡發(fā)送給機器人身上的通信模組R(Robot),耗時T3;
4)通信模組R將控制信息發(fā)送給機器人身上的各個關節(jié),耗時T4;
5)各個關節(jié)執(zhí)行指令,器械處理時延T5;
6)從以上整個端到端時延分析可知,網絡傳輸時延T3只是其中一部分,還有其他設備內部的傳輸和處理時延開銷。
結論4:在設備未經優(yōu)化的情況下,5G網絡只能解決一部分時延敏感度在秒級左右的應用,秒級以下的時延敏感度還需要對設備及工業(yè)傳輸協(xié)議進行進一步優(yōu)化。
4 結束語
隨著機器人技術的發(fā)展,遠程控制機器人未來可應用于危機處理及涉及危險操作的工業(yè),例如炸彈威脅、高壓電流、輻射、空氣污染、細菌、有害磁場等行業(yè)。5G提供的低時延高可靠網絡和Wi-Fi網絡相比可以使時延性能得到提升。然而,網絡傳輸時延只是端到端時延其中的一部分,還有其他設備內部的傳輸和處理時延開銷。在設備未經優(yōu)化的情況下,5G網絡只能解決一部分時延敏感度在秒級左右的應用,秒級以下的時延敏感度還需要對設備及工業(yè)傳輸協(xié)議進行進一步優(yōu)化。未來可以通過邊緣計算 [7] 以及切片網絡 [8] 等5G特性對端到端網絡時延性能進行進一步優(yōu)化。
編輯:hfy
-
WIFI
+關注
關注
81文章
5309瀏覽量
204803 -
仿生機器人
+關注
關注
1文章
70瀏覽量
15312 -
可穿戴傳感器
+關注
關注
2文章
99瀏覽量
12628
發(fā)布評論請先 登錄
相關推薦
MiR推出MC600移動協(xié)作機器人
協(xié)作機器人要實現0.03mm路徑精度有多難
優(yōu)傲機器人升級高負載協(xié)作機器人,助力客戶生產效率飛躍
協(xié)作機器人拽拖示教詳解
風管遠程控制系統(tǒng)應用方案
teamviewer內網遠程控制外網
機器人神經網絡控制原理是什么
Al大模型機器人
工業(yè)機器人數據采集遠程監(jiān)控平臺是什么
請問mx880 5G數據終端可以設置優(yōu)先5G網絡嗎?
基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
基于飛凌嵌入式RK3568J核心板的工業(yè)機器人控制器應用方案
工業(yè)4.0中的機器人向協(xié)作機器人演進
物通博聯遠程PLC通訊模塊通過5G網絡實現遠程控制PLC






 工商網監(jiān)
工商網監(jiān)
評論