") KUKAC4-VASS機器人抓手設置
KUKAC4-VASS機器人抓手設置
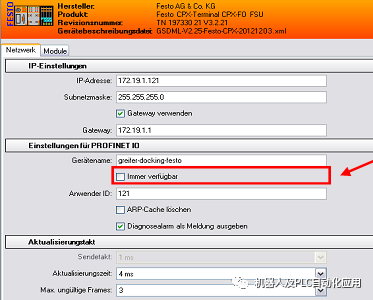
為了確保安全的PROFINET通信,必須根據(jù)下表配置PROFINET組件的更新時間。 請注意,所有設備都有自己的最短更新時間。 如果高于表中的規(guī)格,則必須為設備設置此最短更新時間。
抓手的更新時間是4S

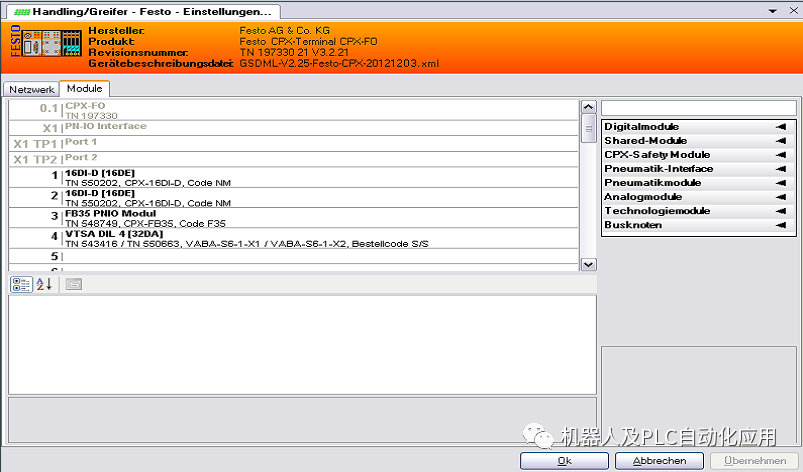
抓手使用SMC閥導:
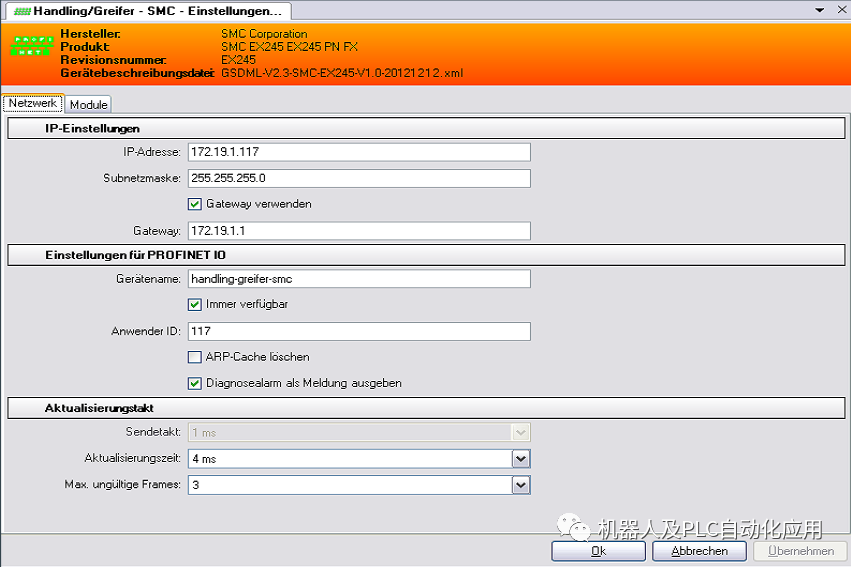

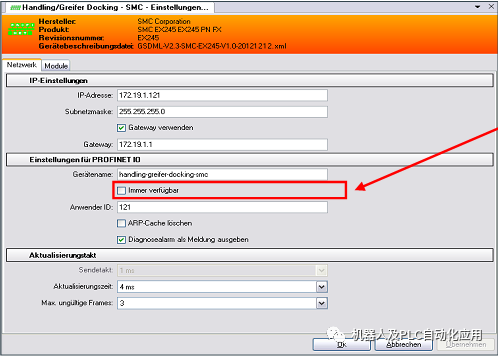
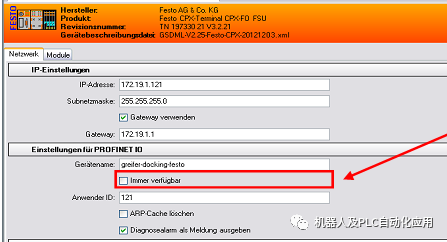
如果是快換抓手則不能勾選 “始終可用”。
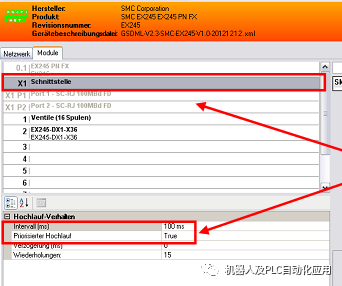
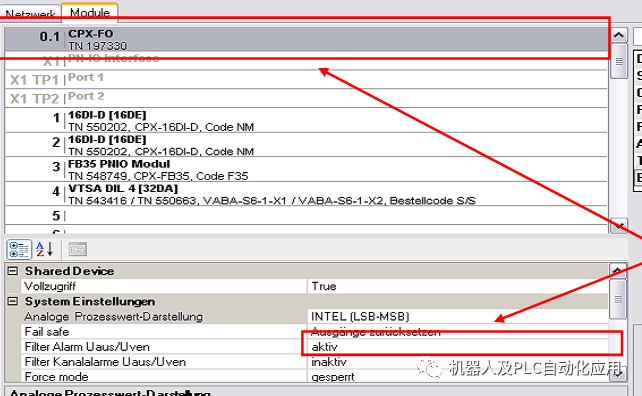
使用模塊的優(yōu)先啟動“ True”
抓手使用FESTO閥導:
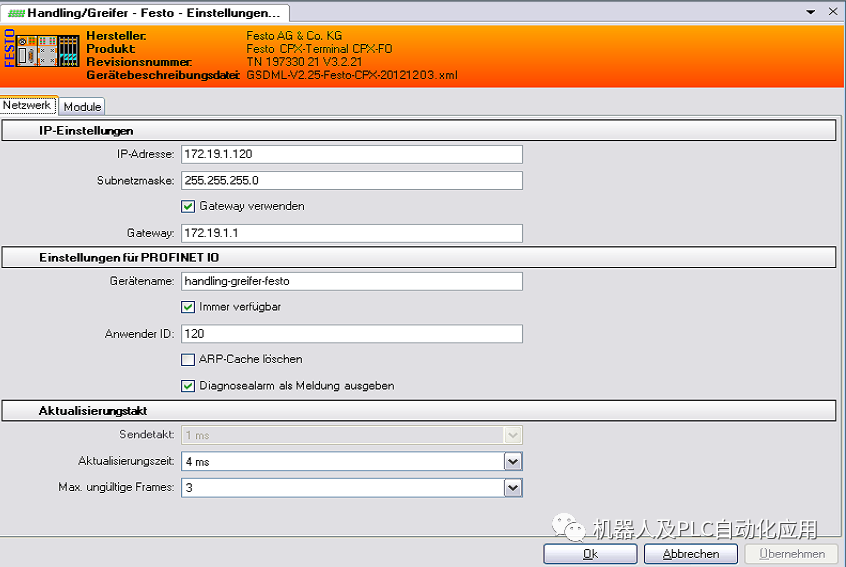
需要停用US2診斷
如果是快換抓手則不能勾選 “始終可用”。
使用模塊的優(yōu)先啟動“ True”
3. 鉗工能的設置
抓手
抓手
抓手
抓手

抓手
抓手

吸盤
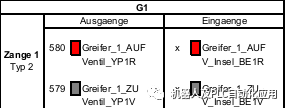
-抓手的關鍵輸入輸出點A577打開先導閥 E577先導閥打開,E578先導閥關閉-
范圍-E/A 577-704
16個字節(jié)-
617-628吸盤-
579開始是夾具
M1 = E579 & E580 + E15 BT1和BT2的檢測以及E15空運轉POT
M1 /M2 有件/沒件(自己設置)
M31 = E583 & !E584 & E585 & !E586 ~ 抓手 1 AUF 打開
M32 = !E583 & E584 & !E585 & E586 ~ 抓手1 ZU 關閉
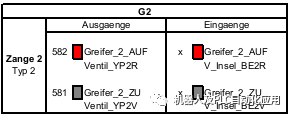
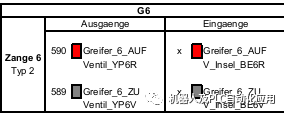
M33 = E587 & !E588 & E589 & !E590 ~抓手2 AUF 打開
M34 = !E587 & E588 & !E589 & E590 ~抓手2 ZU 關閉
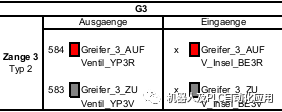
M35 = E591 & !E592 & E593 & !E594 ~抓手3 AUF 打開
M36 = !E591 & E592 & !E593 & E594 ~抓手3 ZU 關閉
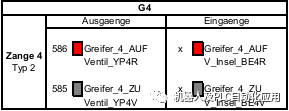
M37 = E595 & !E596 & E597 & !E598 ~抓手4 AUF 打開
M38 = !E595 & E596 & !E597 & E598 ~抓手4 ZU 關閉
M63,M64-M68 吸盤
F54 ?選擇無吹氣的吸入回路
F523 ?G KYP01E反饋可用控制空氣(常閉觸點)
F524 ?G KYP01E反饋控制空氣不可用(常開觸點)
;FOLDF523 = EIN -需要壓力檢測
F524 = AUS -不需要壓力檢測
責任編輯:lq
-
機器人
+關注
關注
211文章
28646瀏覽量
208439 -
通信
+關注
關注
18文章
6072瀏覽量
136433 -
Profinet
+關注
關注
6文章
1217瀏覽量
23582
原文標題:KUKAC4-VASS機器人抓手設置(全)
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎模塊
開源項目!能夠精確地行走、跳舞和執(zhí)行復雜動作的機器人—Tillu
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
焊接機器人拖拽軌跡怎么設置

焊接機器人示教模式怎么設置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論