") 1D~4D雷達(dá)是如何區(qū)分出物體的?
1D~4D雷達(dá)是如何區(qū)分出物體的?
1D-RADAR
連續(xù)波(CW)雷達(dá)廣泛應(yīng)用于許多運(yùn)動(dòng)檢測(cè)應(yīng)用中。它通過比較發(fā)送和接收信號(hào)的頻率差,來測(cè)量目標(biāo)的速度。然而,CW雷達(dá)無法測(cè)量目標(biāo)的距離,因?yàn)樗鼰o法區(qū)分頻率變化是由于目標(biāo)的速度變化還是距離變化。
頻移鍵控(FSK)雷達(dá)也能根據(jù)速度分離對(duì)象,但它還具有測(cè)量距離的優(yōu)點(diǎn)。FSK雷達(dá)通過改變發(fā)送信號(hào)的頻率,然后比較接收信號(hào)和發(fā)送信號(hào)的頻率差,來同時(shí)測(cè)量目標(biāo)的速度和距離。因此,F(xiàn)SK雷達(dá)在需要同時(shí)測(cè)量速度和距離的應(yīng)用中,比如交通監(jiān)控和無人駕駛,具有明顯的優(yōu)勢(shì)。
1D雷達(dá)可提供物體的信息:速度
如果兩個(gè)物體的速度相同,雷達(dá)是無法將它們進(jìn)行區(qū)分和定位的。上半部分我們可以看到兩個(gè)并行移動(dòng)的紅色人形,這表示他們的速度是相同的。在這種情況下,雷達(dá)無法區(qū)分這兩個(gè)物體,因此將它們檢測(cè)為一個(gè)物體,就好像這兩個(gè)人位于所有出現(xiàn)陰影的紅色人形的位置一樣。
下半部分可以看到一個(gè)黑色的人形,他的速度比上面的紅色人形快。在這種情況下,雷達(dá)能夠區(qū)分"紅色"物體和"黑色"物體,并且如果黑色人形位于所有出現(xiàn)陰影的黑色人形的位置,雷達(dá)也能做到相同的區(qū)分。
2D-RADAR (FSK)
如果兩個(gè)物體的速度和距離都相同,在一維環(huán)境中(沒有角度信息),雷達(dá)是無法將它們進(jìn)行區(qū)分和定位的。在上部我們可以看到兩個(gè)并行的紅色人形,他們離雷達(dá)的距離相同,且移動(dòng)速度也一致。在這種情況下,雷達(dá)無法區(qū)分這兩個(gè)物體,從而將它們檢測(cè)為一個(gè)物體,就好像這兩個(gè)人位于所有出現(xiàn)陰影的紅色人形的位置一樣。
2D雷達(dá)可提供物體的信息:速度和距離
在下半部分我們可以看到一個(gè)黑色的人形,他的速度不同于上面的紅色人形,并且離雷達(dá)更近(距離不同)。在這種情況下,雷達(dá)能夠區(qū)分"紅色"物體和"黑色"物體,并且如果黑色人形位于所有出現(xiàn)陰影的黑色人形的位置,雷達(dá)也能做到相同的區(qū)分。
調(diào)頻連續(xù)波(FMCW)雷達(dá)在僅測(cè)量速度不足夠的情況下使用。如果雷達(dá)設(shè)備只有一個(gè)發(fā)送通道和一個(gè)接收通道,那么可以測(cè)量到物體的距離,但無法測(cè)量角位移。
3D雷達(dá)(FMCW MIMO)
3D雷達(dá)可提供物體的信息:速度、距離和角度
3D雷達(dá)擁有多個(gè)發(fā)射和接收天線。每個(gè)發(fā)射的信號(hào)都可以由任何天線接收。多個(gè)天線的特殊排列提高了空間分辨率,減少了對(duì)干擾的敏感性。具有相同速度、距離和角位置的物體可以被分離(具有在二維環(huán)境中定位物體的可能性)。
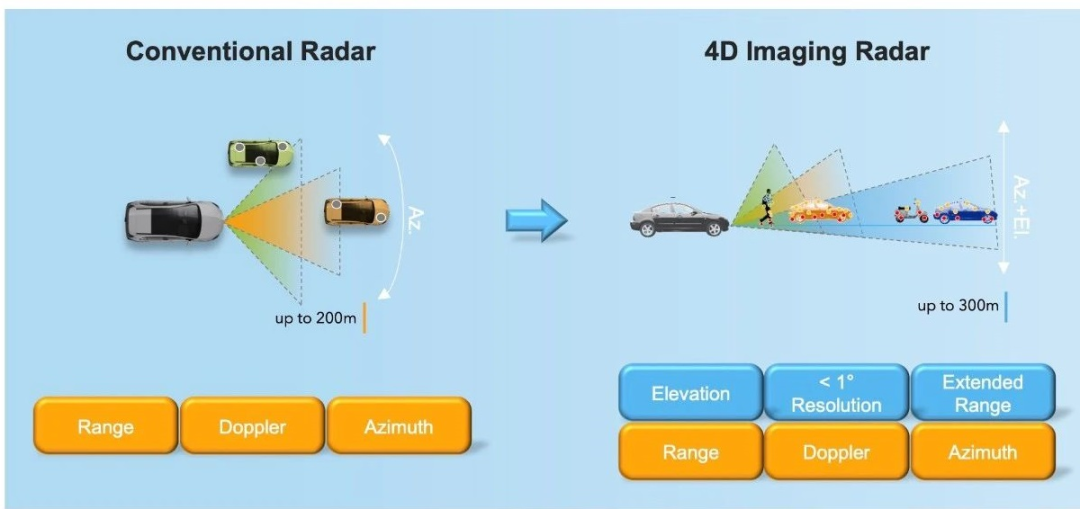
4D雷達(dá)(FMCW MIMO)
與3D雷達(dá)相比,4D雷達(dá)還具有在高程上偏移的多個(gè)天線,因此可以在仰角中分離檢測(cè)。這使得可以在3D環(huán)境中進(jìn)行定位。
4D雷達(dá)可提供物體的信息:速度、距離和角度(方位和俯仰)
通過速度、距離和角度(水平和垂直)來分離物體。具有相同速度、距離和角位置的物體可以被分離(具備在三維環(huán)境中定位物體的可能性)。
審核編輯:湯梓紅
-
天線
+關(guān)注
關(guān)注
68文章
3212瀏覽量
141141 -
FSK
+關(guān)注
關(guān)注
14文章
114瀏覽量
58476 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
2966瀏覽量
118011 -
接收信號(hào)
+關(guān)注
關(guān)注
0文章
20瀏覽量
7348
原文標(biāo)題:1D~4D雷達(dá)是如何區(qū)分出物體的?
文章出處:【微信號(hào):雷達(dá)通信電子戰(zhàn),微信公眾號(hào):雷達(dá)通信電子戰(zhàn)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
4D成像雷達(dá)專欄 | 4D高分辨毫米波雷達(dá)概述

從4D到4D數(shù)字成像,雷達(dá)數(shù)字化升級(jí)助力實(shí)現(xiàn)更好的智能駕駛

神奇的4D打印:物體可完成自我組裝
傲酷公司獨(dú)創(chuàng)的4D毫米波雷達(dá)性能媲美低線束激光雷達(dá)
基于Vayyar的4D MIMO片上雷達(dá)評(píng)估套件
剖析如何做好一款4D高分辨毫米波雷達(dá)

什么是4D毫米波雷達(dá)?
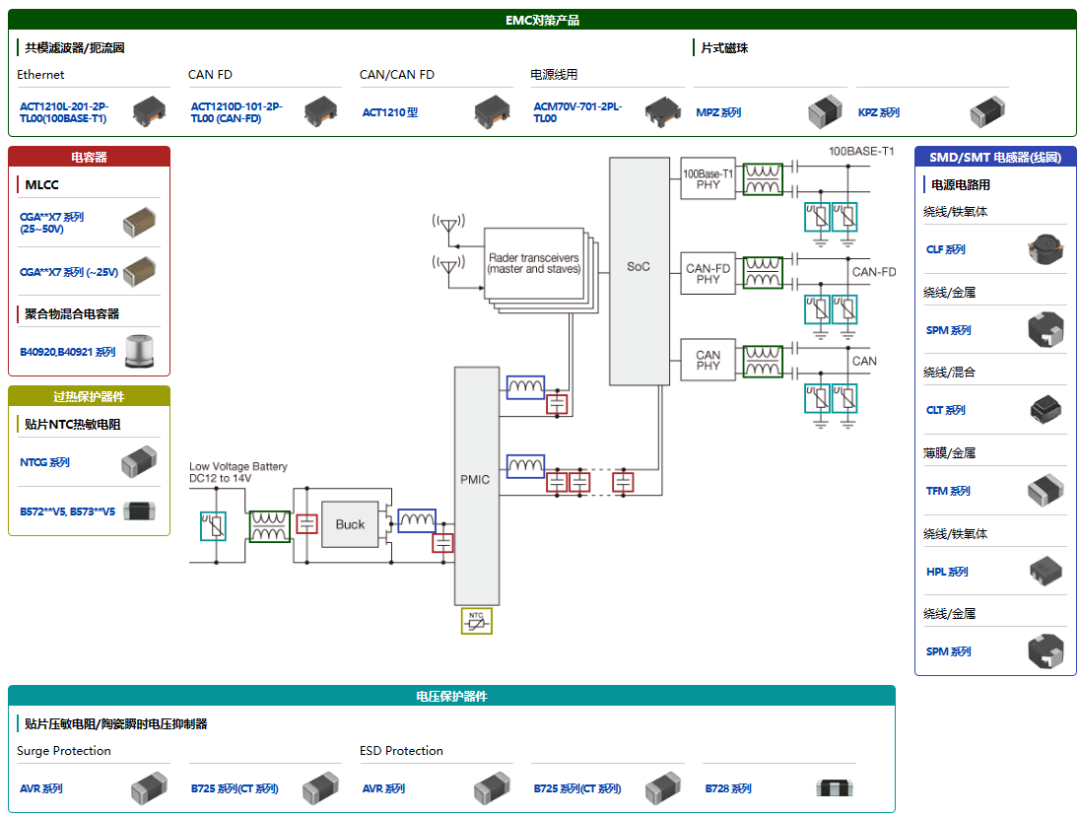
TDK | 4D雷達(dá)裝置與中央網(wǎng)關(guān)/車內(nèi)服務(wù)器
什么是4D毫米波雷達(dá)?4D毫米波雷達(dá)與傳統(tǒng)雷達(dá)有何區(qū)別?
什么是4D成像毫米波雷達(dá)?4D成像毫米波雷達(dá)作用解析
4D毫米波雷達(dá)市場(chǎng)技術(shù)盤點(diǎn)
國(guó)內(nèi)4D毫米波雷達(dá)廠商名錄
中央域控雷達(dá):4D雷達(dá)新時(shí)代

4D毫米波雷達(dá)的拆解報(bào)告分享





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論