") 機(jī)器人避障問題如何解決
機(jī)器人避障問題如何解決
如今,機(jī)器人已被廣泛應(yīng)用于餐廳、酒店、銀行等各大服務(wù)場所,在人員復(fù)雜的場景中,對于機(jī)器人如何自由穿梭于人群是個很大的挑戰(zhàn),這需要涉及到機(jī)器人的自主定位導(dǎo)航技術(shù),自主定位導(dǎo)航技術(shù)是機(jī)器人實(shí)現(xiàn)自主行走的重要標(biāo)志,而避障又是實(shí)現(xiàn)自主定位導(dǎo)航的基本,它是指機(jī)器人在行走時,通過傳感器感知到在其路線規(guī)劃上存在的靜態(tài)或動態(tài)障礙物,按照相應(yīng)算法進(jìn)行路徑實(shí)時更新,最終繞開障礙物到達(dá)目標(biāo)點(diǎn)。那機(jī)器人避障問題又該如何解決呢?
目前,在解決機(jī)器人避障問題中,市面上大多會采用到激光雷達(dá)傳感器,激光雷達(dá)是機(jī)器人避障的重要傳感器,它扮演著機(jī)器人“眼睛”的角色,可以實(shí)時感知周圍環(huán)境信息,包括障礙物的尺寸、形狀、位置、姿態(tài)等。
當(dāng)然,如果僅靠激光雷達(dá)是無法達(dá)到理想中的效果,為此,思嵐科技在幾年前就推出了扮演機(jī)器人“小腦”角色的Slamware Core,一個控制機(jī)器人運(yùn)動的核心中樞。對機(jī)器人來說,小腦可以繪制環(huán)境地圖來指導(dǎo)自身行動,而如何在環(huán)境中找到一條從起點(diǎn)到終點(diǎn),同時避開障礙物的最優(yōu)路徑顯得更為困難。
思嵐科技的模塊化自主定位導(dǎo)航SLAMWARE內(nèi)置基于激光雷達(dá)的同步定位與建圖 (SLAM) 及配套的路徑規(guī)劃功能。同時,它也是思嵐科技推出的服務(wù)機(jī)器人自主行走的全套解決方案之一。
相較于開源ROS機(jī)器人操作系統(tǒng),SLAMWARE內(nèi)置的SLAM算法構(gòu)建出的地圖更加精確,即使受到外界干擾也可以保持較高的定位精度。同時,SLAMWARE采用D*算法(即動態(tài)啟發(fā)式路徑搜索算法),機(jī)器人不預(yù)先錄入地圖,便可在陌生環(huán)境中行動自如,躲避動態(tài)障礙物。
通常來說,如果想讓機(jī)器人勝任較為復(fù)雜場景的避障任務(wù),除了激光雷達(dá)與SLAM算法外,還需要結(jié)合其他傳感器作為補(bǔ)充。需涉及到超聲波、深度攝像頭、防跌落、防碰撞等多種傳感器。但在實(shí)際應(yīng)用中,傳感器也并非越多越好,不合理的傳感器組合不但會增加使用成本,還有可能導(dǎo)致各傳感器之間產(chǎn)生互相干擾的情況。每種傳感器的誤差和噪音模型都存在區(qū)別,比如超聲波傳感器的測距精度和檢出障礙物的方位精度遠(yuǎn)遠(yuǎn)低于激光雷達(dá)。
對不同傳感器進(jìn)行融合,提取出更加符合現(xiàn)實(shí)情況的檢測數(shù)據(jù),產(chǎn)品形態(tài)、與使用環(huán)境的適用性、及成本問題是不得不考慮的。
產(chǎn)品形態(tài):傳感器的選擇本身也會受造型、運(yùn)動特性等影響,比如一些防人的教育機(jī)器人,本身外形就小巧可愛,如果將一個體積較大的雷達(dá)放置其中,顯然整體的美觀度便會受影響的。
與使用環(huán)境的適用性:每種傳感器都有其不同的特性,就激光雷達(dá)而言,假如將一個只有10米探測距離的激光雷達(dá)應(yīng)用于工作環(huán)境遠(yuǎn)遠(yuǎn)大于10米的大場景中顯然是不合適的。同樣,如果機(jī)器人需要在黑暗環(huán)境中工作,只配備了只能接受可見光的視覺傳感器也是不合適的。
成本:成本問題是制約定位導(dǎo)航技術(shù)普及的核心因素,當(dāng)選用的傳感器可以很好的滿足上述指標(biāo)后,成本便是決定其能否最終被選用的標(biāo)準(zhǔn)。歷史上,由于激光雷達(dá)成本高昂,導(dǎo)致無法最終在實(shí)際產(chǎn)品中應(yīng)用。近年來,國內(nèi)低成本激光雷達(dá)的興起,打破了我國長期被國外壟斷的現(xiàn)象。
機(jī)器人避障是實(shí)現(xiàn)機(jī)器人自主行走的根本,解決機(jī)器人避障問題除了利用激光雷達(dá)作為核心傳感器配合相應(yīng)算法,還應(yīng)做好多傳感器的融合,否則很難達(dá)到理想的避障效果。
審核編輯 黃昊宇
-
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3374瀏覽量
92889 -
機(jī)器人避障
+關(guān)注
關(guān)注
0文章
11瀏覽量
7262
發(fā)布評論請先 登錄
相關(guān)推薦
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
艾邁斯歐司朗Belago紅外LED,助力Supernode打造避障掃地機(jī)器人

使用NVIDIA Jetson打造機(jī)器人導(dǎo)盲犬
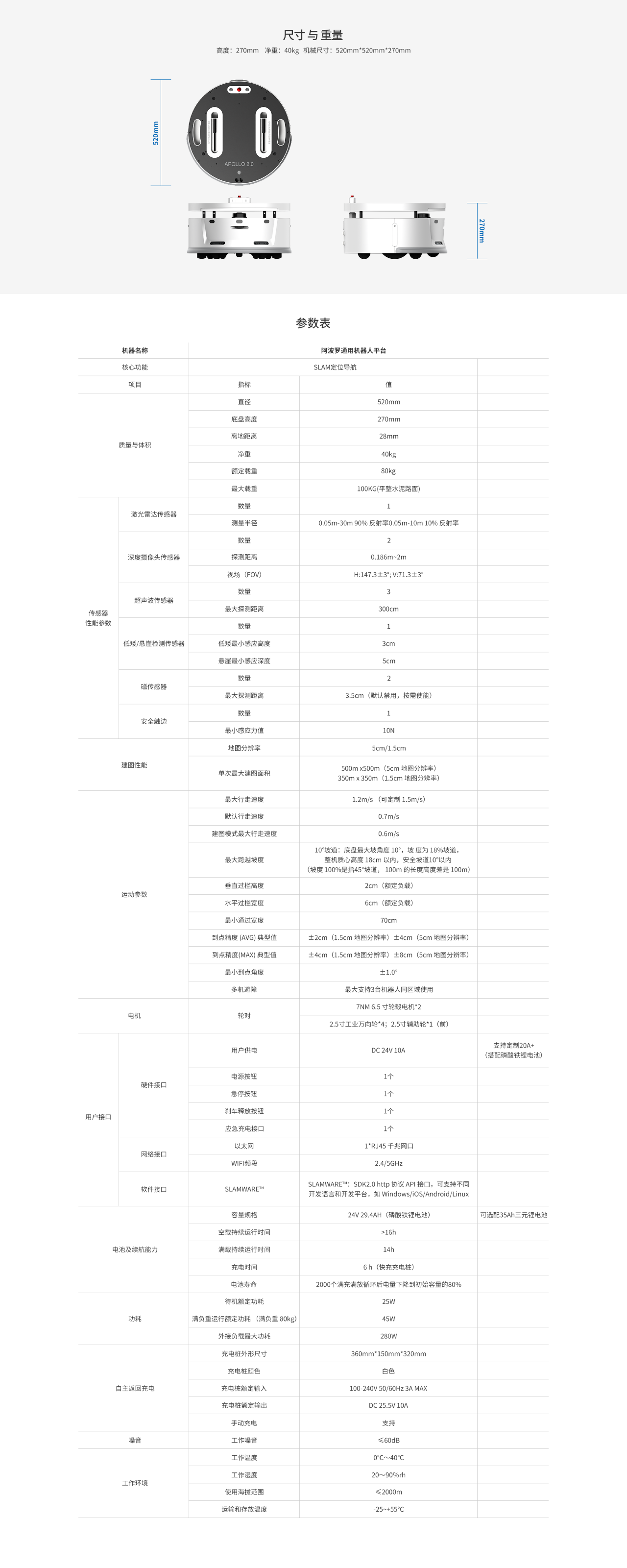
思嵐科技全場景機(jī)器人底盤Apollo2.0的特性
掃地機(jī)器人避障技術(shù)的發(fā)展史
安防巡檢機(jī)器人:守護(hù)安全的智能衛(wèi)士

Al大模型機(jī)器人
深圳北站智能化升級:巡檢機(jī)器人上崗,明治激光雷達(dá)“護(hù)航”避障






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論