") IMU中三軸加速計、陀螺儀和磁力計的工作原理
IMU中三軸加速計、陀螺儀和磁力計的工作原理
IMU:Inertial Measurement Unit,即慣性測量單元。它是由三軸加速計、三軸陀螺儀、三軸磁力計等多種傳感器組成的模塊。
IMU在無人駕駛汽車、無人機上面應用的比較多,包括手機等很多電子設備也有IMU傳感器的存在。
下面就來講講IMU中三軸加速計、三軸陀螺儀、三軸磁力計的工作原理。
1
三軸加速度計三軸加速度傳感器是基于加速度的基本原理去實現(xiàn)工作。
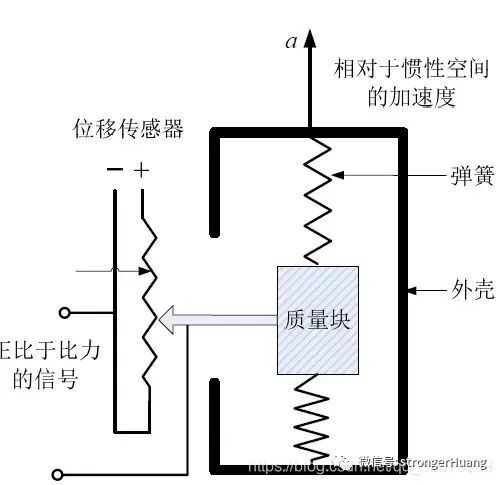
1.測量比力三軸加速度計是一種慣性傳感器,能夠測量物體的比力,即去掉重力后的整體加速度或者單位質(zhì)量上作用的非引力。當加速度計保持靜止時,加速度計能夠感知重力加速度,而整體加速度為零。在自由落體運動中,整體加速度就是重力加速度,但加速度計內(nèi)部處于失重狀態(tài),而此時三軸加速度計輸出為零。
2.測量角度
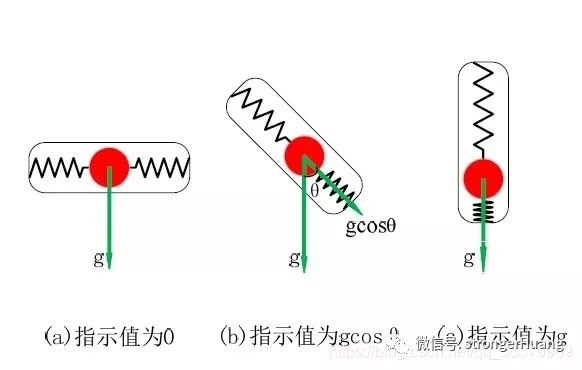
三軸加速度計的原理能夠用來測量角度。直觀地,如圖所示,彈簧壓縮量由加速度計與地面的角度決定。比力能夠通過彈簧壓縮長度來測量。因此在沒有外力作用的情況下,加速度計能夠精確地測量俯仰角和滾轉(zhuǎn)角,且沒有累積誤差。
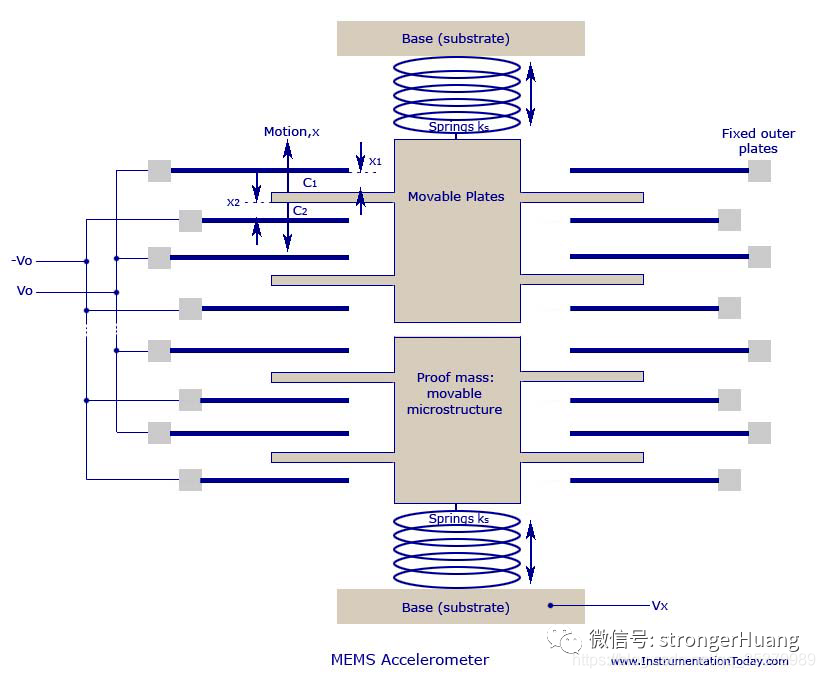
MEMS三軸加速度計是采用壓阻式、壓電式和電容式工作原理,產(chǎn)生的比力(壓力或者位移)分別正比于電阻、電壓和電容的變化。這些變化可以通過相應的放大和濾波電路進行采集。該傳感器的缺點是受振動影響較大。 介于其測量角度的工作原理三軸加速度計無法測量偏航角:
可測量俯仰角和橫滾角:
嵌入式專欄
2
三軸陀螺儀三軸陀螺儀是慣性導航系統(tǒng)的核心敏感器件,其測量精度直接影響慣導系統(tǒng)的姿態(tài)解算的準確性。 作用:用于測量單元中的角速度及對角速度積分后角度的計算 原理:理解三軸陀螺儀的原理首先要知道科里奧利力 科里奧利力科里奧利力(Coriolis force)有些地方也稱作哥里奧利力,簡稱為科氏力,是對旋轉(zhuǎn)體系中進行直線運動的質(zhì)點由于慣性相對于旋轉(zhuǎn)體系產(chǎn)生的直線運動的偏移的一種描述。科里奧利力來自于物體運動所具有的慣性。 ---來自百度百科 當一個質(zhì)點相對于慣性系做直線運動時,因為質(zhì)點自身慣性,它相對于旋轉(zhuǎn)體系,其軌跡是一條曲線。立足于旋轉(zhuǎn)體系,我們認為有一個力驅(qū)使質(zhì)點運動軌跡形成曲線。科氏力就是對這種偏移的一種描述,表示為:

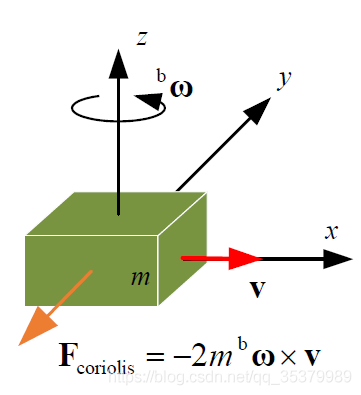
即本來直線的運動當放在一個旋轉(zhuǎn)體系中直線軌跡會發(fā)生偏移,而實際上并直線運動的問題并未受到力的作用,設立這樣一個虛擬的力稱為科里奧利力。
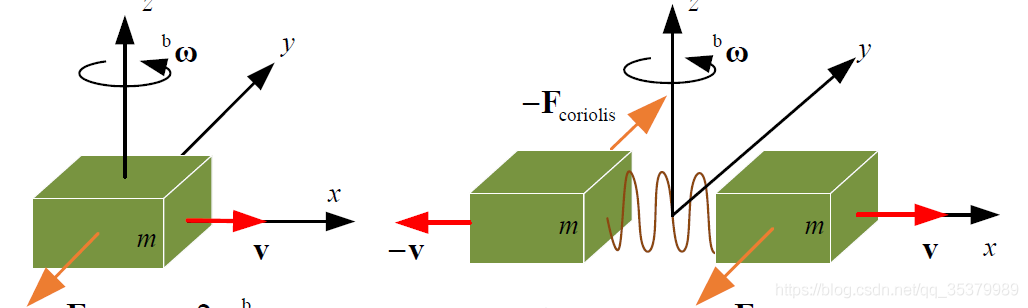
由此我們在陀螺儀中,選用兩塊物體,他們處于不斷的運動中,并令他們運動的相位相差-180度,即兩個質(zhì)量塊運動速度方向相反,而大小相同。它們產(chǎn)生的科氏力相反,從而壓迫兩塊對應的電容板移動,產(chǎn)生電容差分變化。電容的變化正比于旋轉(zhuǎn)角速度。由電容即可得到旋轉(zhuǎn)角度變化。
嵌入式專欄
3
三軸磁力計
磁力計能提供裝置在XYZ各軸所承受磁場的數(shù)據(jù),接著相關數(shù)據(jù)會匯入微控制器的運算法,以提供磁北極相關的航向角,利用這些信息可偵測地理方位。
磁力儀是采用三個互相垂直的磁阻傳感器,每個軸向上的傳感器檢測在該方向上的地磁場強度。
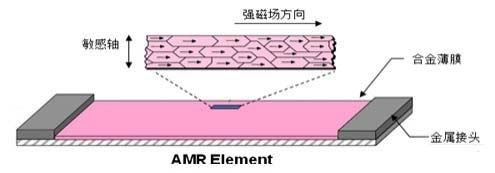
上圖為一種采用具有晶體結(jié)構的合金材料。它們對外界的磁場很敏感,磁場的強弱變化會導致磁阻傳感器電阻值發(fā)生變化。
另外三軸磁力計還可以采用洛倫茲力原理,電流流過磁場產(chǎn)生力,從而驅(qū)動電容等變化。
原文標題:IMU中加速度計、陀螺儀、磁力計的工作原理
文章出處:【微信公眾號:strongerHuang】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
責任編輯:haq
-
傳感器
+關注
關注
2553文章
51405瀏覽量
756621 -
加速計
+關注
關注
3文章
126瀏覽量
58462 -
無人駕駛
+關注
關注
98文章
4090瀏覽量
121012 -
IMU
+關注
關注
6文章
319瀏覽量
45901
原文標題:IMU中加速度計、陀螺儀、磁力計的工作原理
文章出處:【微信號:strongerHuang,微信公眾號:strongerHuang】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
海凌科發(fā)布HLK-AS2001十軸姿態(tài)傳感器模塊
ICM-42670-P中文數(shù)據(jù)手冊和開發(fā)套件:高性能 6 軸 Motion跟蹤? IMU
十軸姿態(tài)傳感器模塊 | 集成加速度計、陀螺儀、磁力計,自帶BLE5.0藍牙

多種傳感器集成,IMU助力無人機穩(wěn)定飛行
陀螺儀LSM6DSV16X與AI集成(11)----融合磁力計進行姿態(tài)解算

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領域選型介紹

磁力計LIS2MDL開發(fā)(4)----MotionMC 執(zhí)行磁力計校準
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(11)----磁力計校準
驅(qū)動LSM6DS3TR-C實現(xiàn)高效運動檢測與數(shù)據(jù)采集(10)----融合磁力計進行姿態(tài)解算

【核芯觀察】IMU慣性傳感器上下游產(chǎn)業(yè)梳理(三)
單片機一個IIC連接兩個MPU9250如何設置讀取磁力計的模式?
愛普生三軸加速度計傳感器HGPM01






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論