") 基于模糊控制器的液壓系統(tǒng)模糊控制的性能及應(yīng)用研究
基于模糊控制器的液壓系統(tǒng)模糊控制的性能及應(yīng)用研究
作者:鄭春歧,高風(fēng)陽,張國忠
1、液壓系統(tǒng)控制的基本內(nèi)容
液壓系統(tǒng)是挖掘機(jī)實(shí)現(xiàn)各種運(yùn)動(dòng)和進(jìn)行自動(dòng)控制的基礎(chǔ)。從某種意義上來講,液壓系統(tǒng)的性能決定著挖掘機(jī)的質(zhì)量與工作效率。現(xiàn)代挖掘機(jī)能夠根據(jù)工作環(huán)境和作業(yè)條件,自動(dòng)實(shí)現(xiàn)分功率的變量與全功率變量,以保證任何情況下發(fā)動(dòng)機(jī)均不超載,使發(fā)動(dòng)機(jī)運(yùn)行平穩(wěn)且功率得到充分利用;還應(yīng)設(shè)置減速系統(tǒng)(AutoSlow)和負(fù)控制系統(tǒng)(Negative Control),以便當(dāng)其工作裝置不動(dòng)作時(shí),使發(fā)動(dòng)機(jī)油門自動(dòng)減小,并使液壓泵排量減至最小以節(jié)省能量。根據(jù)挖掘機(jī)工況變化大而快這一特點(diǎn),為有效利用以動(dòng)機(jī)功率,且保證安全,正常作業(yè),現(xiàn)代挖掘機(jī)控制系統(tǒng)應(yīng)具有下列功能:
(1)速度傳感 檢查發(fā)動(dòng)機(jī)轉(zhuǎn)速是否在輸出范圍內(nèi),并控制液壓泵驅(qū)動(dòng)扭矩使二者匹配及防止發(fā)動(dòng)機(jī)熄火。
(2)負(fù)荷傳感 調(diào)節(jié)液壓泵排量,江中實(shí)際工作時(shí)每個(gè)執(zhí)行元件對流量的需求,節(jié)省能量并獲得精確操縱機(jī)器的效果。
(3)流量分配控制 為實(shí)現(xiàn)工作裝置的聯(lián)合動(dòng)作,需對每執(zhí)行元件(如斗桿液壓缸、鏟斗液壓缸等)提供不同的壓力和流量。當(dāng)液壓系統(tǒng)只有一臺主泵時(shí),通過流量分配控制使各執(zhí)行元件同時(shí)動(dòng)作,滿足不同作業(yè)的要求。
(4)工作制式選擇 滿足不同工作方式的需要求,負(fù)括挖掘作業(yè)、挖溝、平整和精細(xì)動(dòng)作制式。
(5)行走馬達(dá)控制 設(shè)置高速、中速、低速行走自動(dòng)選擇系統(tǒng),實(shí)現(xiàn)機(jī)器行走隨外載荷變化自動(dòng)無級調(diào)速,使行走速度與操縱手柄原位置相對應(yīng)。
(6)回轉(zhuǎn)停車制動(dòng)控制 當(dāng)機(jī)器停止時(shí),回轉(zhuǎn)停車制動(dòng)器用以防止上部結(jié)構(gòu)因重力而回轉(zhuǎn)。作業(yè)時(shí),回轉(zhuǎn)停車制動(dòng)應(yīng)在操縱手柄復(fù)位幾秒鐘后才能起作用,防止上部結(jié)構(gòu)回轉(zhuǎn)運(yùn)動(dòng)的慢性力引起零部件的損壞。
(7)預(yù)熱 在液壓油溫低于某一界線時(shí),發(fā)動(dòng)機(jī)轉(zhuǎn)速自動(dòng)增高,液壓磁流量即隨之增加,液壓系統(tǒng)很快被加熱。
(8)突發(fā)增力 對主溢流閥施以背壓,使系統(tǒng)溢流額定壓力上升,短時(shí)間提高作業(yè)功率。
以上功率的實(shí)現(xiàn),多與對液壓系統(tǒng)的控制有關(guān)。
由于液壓系統(tǒng)的信息具有模糊性、不確定性和偶然性,分析和實(shí)踐表明,模糊控制非常適用這一類系統(tǒng)控制。
2、液壓系統(tǒng)模糊控制
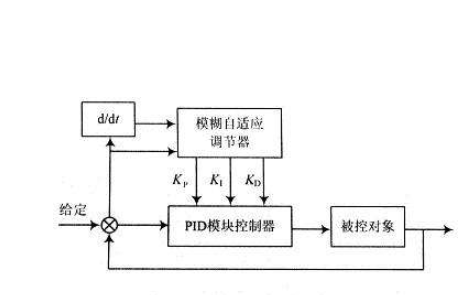
模糊控制系統(tǒng)的核心是模糊控制器,由模糊化、模糊推理、模糊判決(反模糊化)三部分組成,模糊控制工作原理見圖1,其中慮線部分表示模糊控制器;e、ec分別表示實(shí)測值與設(shè)定值的偏差及偏差變化率;E,EC為模糊化的偏差及偏差變化率;u表示模糊控制量,u*為標(biāo)度變換前的精確量;K1、K2、K3皆為標(biāo)度變換系數(shù);r、y分別為輸入量和輸出量。
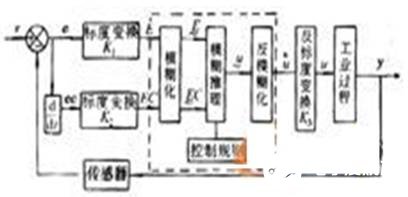
圖1 模糊控制工作原理
對于變負(fù)載工況的進(jìn)、回油旁路節(jié)流調(diào)速液壓系統(tǒng),采用均勻分布的隸屬度函數(shù)曲線;控制總表生成時(shí),首先將三個(gè)語言變量e、ec和u劃分為7擋,即用7個(gè)模糊子集;正大(PL),正中(PM)、正小(PS)、零(ZO)、負(fù)小(NS)、負(fù)中(NM)、負(fù)大(NL)表示。e、ec相應(yīng)于各模糊子集的取值,即為隸屬度。它不示某一確定量對模糊子集的隸屬程度。
控制規(guī)則確定了輸入量e和ec與輸出量u之間的某種關(guān)系,是由“IF.。..THEN.。.”的條件語句來描述的:
IF e is A AMD (or) ec is B,THEN u is C.
其中A、B、C代表模糊子集,經(jīng)離線推理,得到模糊總控制表,如表1所示。
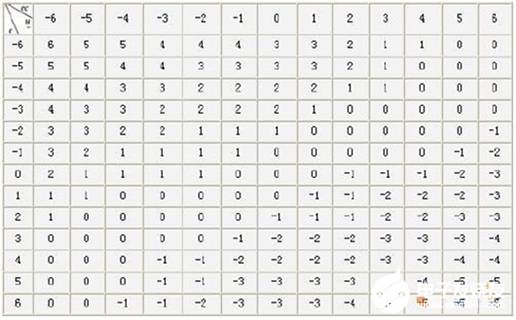
表1
3、控制系統(tǒng)方案設(shè)計(jì)及模糊控制的計(jì)算機(jī)仿真
由前所述,現(xiàn)化挖掘機(jī)控制系統(tǒng)至少應(yīng)包括8個(gè)主要部分,其中某些方面需要通過液壓閥、電液閥實(shí)現(xiàn),而大部功能需經(jīng)過由計(jì)算機(jī)、傳感器及控制執(zhí)行元件組成各個(gè)子控制系統(tǒng)來完成。由于液壓泵的的恒功率控制是液壓挖掘機(jī)的重要控制內(nèi)容,故本文以此為例著重探討模糊控制邏輯及方法在該領(lǐng)域的應(yīng)用問題。
根據(jù)國外挖掘機(jī)發(fā)展現(xiàn)狀,設(shè)計(jì)出發(fā)展現(xiàn)狀,設(shè)計(jì)出挖掘機(jī)液壓控制系統(tǒng)如圖2所示。
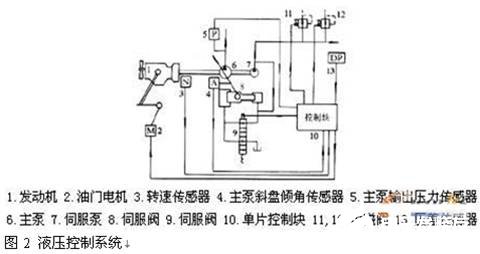
假定所髟液壓油為理想液體,且伺服系統(tǒng)中各元件密封良好,則可得到伺服活塞位移與伺服閥控制電流原線性關(guān)系。亦即得到了液壓泵流量與伺服閥控制電流的線性關(guān)系。由此,根據(jù)前述模糊控制策略和方法,對圖2所示系統(tǒng)進(jìn)行的計(jì)算機(jī)仿真結(jié)果示于圖3、圖4。其中設(shè)發(fā)動(dòng)機(jī)額定功率為94kw,如圖3中直線所示;設(shè)定液壓泵的正常工作壓力為 16MPa,變化范圍為16--5MPa及16--32MPa。圖中的曲線為液壓泵壓力在上述變化范圍內(nèi)變化時(shí),由模糊控制策略及方法得到的發(fā)動(dòng)機(jī)功率的變化規(guī)律。圖4中的曲線為伺服液壓缸控制電磁閥控制電流的變化規(guī)律。
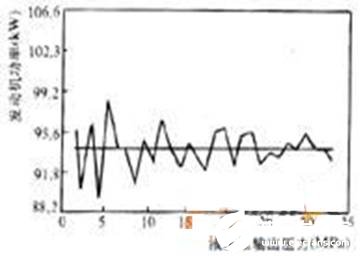
圖3 發(fā)動(dòng)機(jī)功率變化曲線
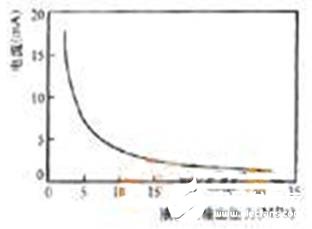
圖4 伺服控制電磁閥電流變化曲線
由圖3、圖4可以看出,當(dāng)外載荷變化使液壓泵輸出壓力在系統(tǒng)溢流閥調(diào)定壓力范圍內(nèi)變化時(shí),由模糊控制可得到接近發(fā)動(dòng)機(jī)額定功率的變化規(guī)律,且最大的差值不超過5%。而一般的工程機(jī)械用發(fā)動(dòng)機(jī)的扭矩儲備系數(shù)為1.06--1.14左右。因此,由模糊控制委動(dòng)機(jī)自身特性的結(jié)合,完全可以使發(fā)動(dòng)機(jī)穩(wěn)定正常的工作。
責(zé)任編輯:gt
-
發(fā)動(dòng)機(jī)
+關(guān)注
關(guān)注
33文章
2498瀏覽量
69724 -
控制器
+關(guān)注
關(guān)注
112文章
16448瀏覽量
179483 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6661瀏覽量
110891
發(fā)布評論請先 登錄
相關(guān)推薦
基于模糊控制的恒流源設(shè)計(jì)
基于模糊專家模型的神經(jīng)控制器及應(yīng)用研究
多維模糊控制器的設(shè)計(jì)與軟件編程
基于模糊PID控制的飛機(jī)液壓缸性能測試
倒立擺的模糊控制研究
模糊溫度控制器的設(shè)計(jì)與Matlab仿真

一種簡化PID模糊控制器的研究與設(shè)計(jì)

基于Matlab的網(wǎng)絡(luò)控制系統(tǒng)模糊控制算法應(yīng)用研究
模糊控制在自動(dòng)補(bǔ)償磨削系統(tǒng)中的應(yīng)用研究
基于模糊控制的磁引導(dǎo)AGV系統(tǒng)路徑校正的應(yīng)用研究
基于分層模糊系統(tǒng)的自適應(yīng)H∞控制器設(shè)計(jì)

模糊控制理論與系統(tǒng)原理PDF電子書免費(fèi)下載





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論