") 一文知道步進驅(qū)動器的結(jié)構(gòu)及工作原理
一文知道步進驅(qū)動器的結(jié)構(gòu)及工作原理
1、步進電機控制系統(tǒng):大家看一下面這個圖,如圖1:
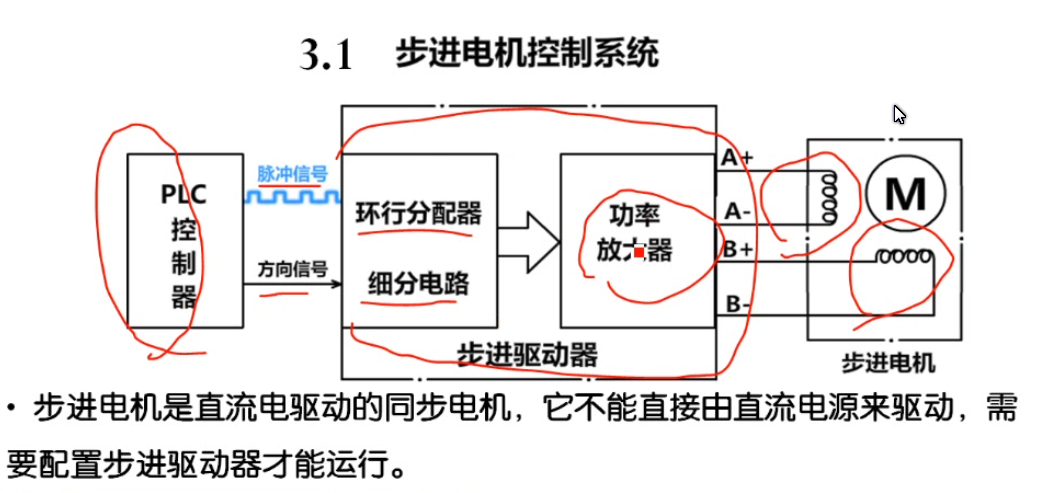
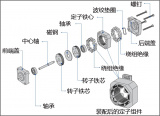
左邊PLC控制器它給我們的步進驅(qū)動器提供一個脈沖信號、脈沖的數(shù)量、脈沖的頻率、方向信號,進入步進驅(qū)動器之后 ,它經(jīng)過環(huán)形分配器和細分電路處理,再經(jīng)過功率放大器把信號放大,我在給大家介紹PLC的時候就講過,PLC它輸出的脈沖信號是比較小的,它必須要經(jīng)過步進驅(qū)動器放大脈沖信號之后才能驅(qū)動步進電機轉(zhuǎn)動。這個步進電機它是不能直接接直流電原來驅(qū)動它的,如24V、48V,這樣是不行的,下面呢給大家看一下這個拆開的實物,如圖2:
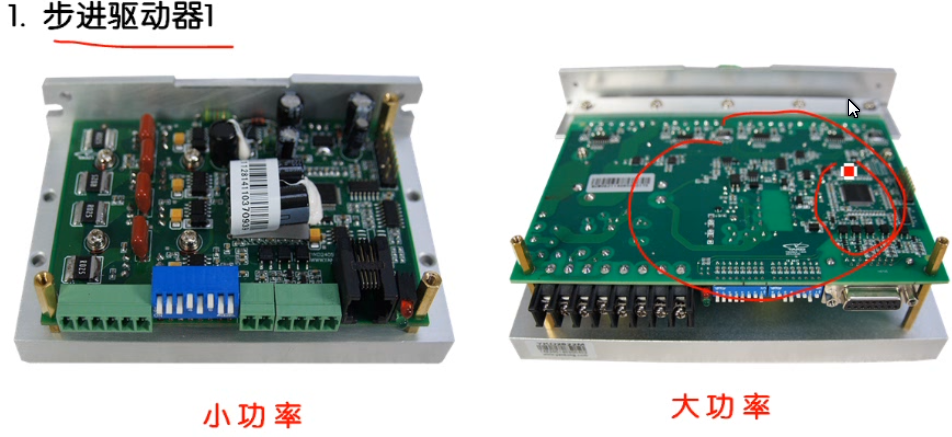
內(nèi)部電路板,左邊是小功率的,右邊呢是大功率的,也是智能化的,它帶有CPU,因為它要帶編碼器執(zhí)行閉環(huán)控制,接這個編碼器的脈沖信號,我們再看一下它的外觀,我之所以要這樣給大家講,是因為現(xiàn)在市面上好多的設(shè)備外觀比較相似,容易混淆,所以我們必須要把它搞清楚,如圖3:
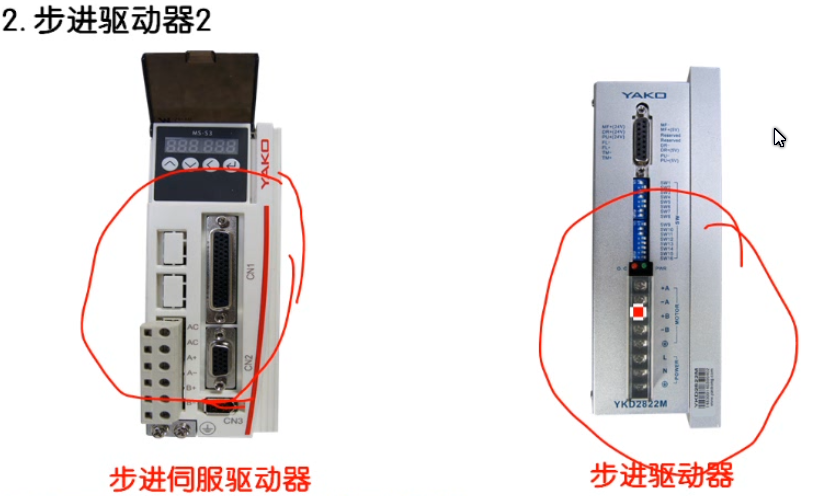
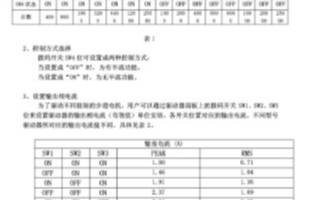
這就是它的外觀了,第一個:步進伺服驅(qū)動器,這個步進伺服,就是說:它有反饋,步進電動機裝有編碼器,這個編碼器它的A相、B相就反饋到我們的伺服驅(qū)動器了,這樣就形成了閉環(huán)控制。第二個呢是不帶編碼器反饋的。2、步進驅(qū)動器的作用:我們說了步進電動機不能用直流電直接帶動,必須由驅(qū)動器來帶動它,步進驅(qū)動器接收到上位機的脈沖信號,由驅(qū)動器內(nèi)部的環(huán)形分配器按一定的順序去出發(fā)功能放大器的功率元件,來控制步進電機的繞組不斷的通斷直流電(就是A相線圈、B相線圈不斷的通斷電,也就是持續(xù)的交替通電),使我們的電動機轉(zhuǎn)動。下面我們再看一個圖,如圖4:
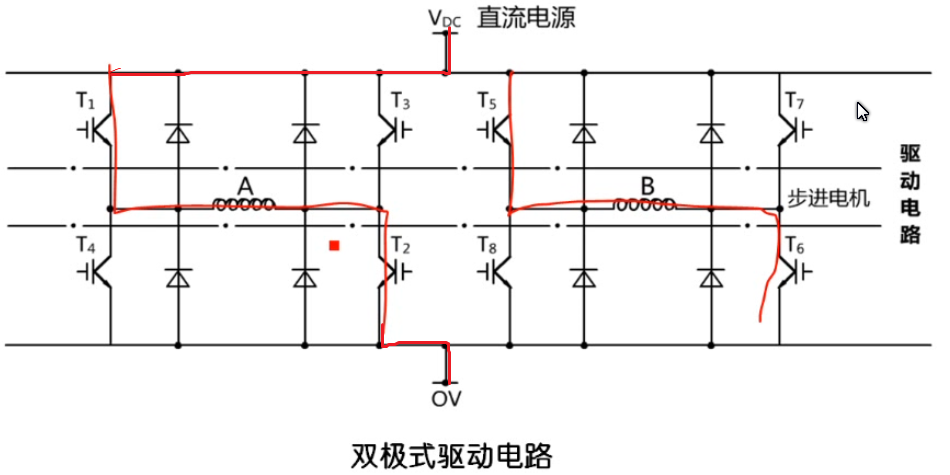
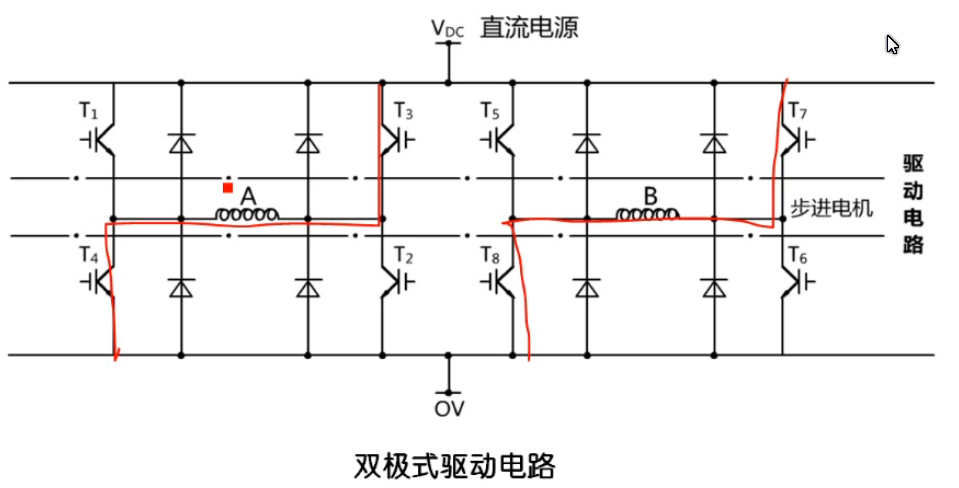
這個圖呢就是功率放大器的工作原理圖,這個伺服步進驅(qū)動器它給出來這個T1就導通,T2導通用這個IGBT,現(xiàn)在用這個IGBT的比較多了,直流電源DC正極流向T1再通過那個A線圈,流向T2一直流向0V,這是給的直流電,它馬上就產(chǎn)生磁場了,它就吸引這個轉(zhuǎn)子轉(zhuǎn)動一定的角度,那么給A線圈通完電后,我們下一步給B線圈通電,但是呢,有很多步進電機它是A線圈、B線圈同時通電,再有細分的情況下它給的電流呢,是不一樣的,比如A線圈的電流是4各單位,B線圈的電流是0各單位,如果我們把A線圈的電流減去3各單位,那么B線圈的電流就變成了一個單位,這樣呢就是它的細分,這樣就是說我同時給它供電,用這個步進驅(qū)動器來控制這個電流的大小,來達到步進的目的,就是給A線圈通完電之后又給B線圈通電,完了有反向通電,如下圖,圖5:
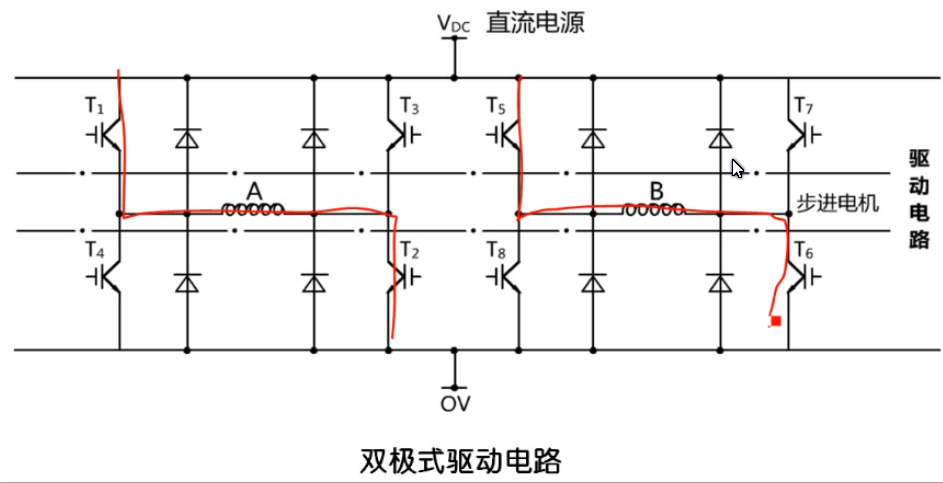
這就是反向通電,這個呢是在沒有細分的情況下才這麼做的,我們再看下面這個圖,如圖6:
它一旦有細分了,我給A線圈通電,通完電之后,也給B線圈通電,它們通電的比例不一樣,那么我們就達到細分的目的了,這些呢都是伺服驅(qū)動器它本身來完成的,不用管它,但你要由細分開關(guān)設(shè)置它的細分,設(shè)置完了,究竟是A線圈先通電、還是B線圈先通電,通電的比例多大你就不用管它了,它會自動形成,那大家只需要關(guān)心給它的脈沖的頻率和脈沖的個數(shù)多少,我們用PLC設(shè)置參數(shù)定位的時候要把這些參數(shù)設(shè)置了,后面的工作都是步進驅(qū)動器它自動完成的,但我們要知道它的這個原理。
責任編輯人:CC
-
驅(qū)動器
+關(guān)注
關(guān)注
53文章
8271瀏覽量
147058 -
步進驅(qū)動器
+關(guān)注
關(guān)注
7文章
81瀏覽量
58260
發(fā)布評論請先 登錄
相關(guān)推薦
步進電機驅(qū)動器的工作原理
步進電機細分驅(qū)動器的研究_張靖
步進電機及驅(qū)動器連接_步進電機驅(qū)動器接法_步進電機驅(qū)動器怎么調(diào)
步進驅(qū)動器說明書_步進電機驅(qū)動器怎么用_步進驅(qū)動器維修
步進驅(qū)動器工作原理_步進電機驅(qū)動器上撥碼開關(guān)怎樣設(shè)置
步進電機的基本結(jié)構(gòu)和工作原理
步進電機驅(qū)動器的概念、工作原理及主要類型

步進電機驅(qū)動器的工作原理、作用及種類
驅(qū)動器的工作原理
步進電機驅(qū)動器的分類和工作原理
為什么步進電機要加驅(qū)動器
步進驅(qū)動器工作原理知識你了解多少?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論