") VPLC系列機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)快速入門
VPLC系列機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)快速入門
今天,正運(yùn)動(dòng)技術(shù)為大家分享一下《VPLC系列機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)快速入門(一)》。
近年來隨著科學(xué)技術(shù)的進(jìn)步,作為21世紀(jì)三大尖端技術(shù)之一的人工智能得到飛速發(fā)展。而視覺技術(shù)作為人工智能領(lǐng)域的一個(gè)分支,也隨之發(fā)展,各行各業(yè)也漸漸開始進(jìn)行技術(shù)變革。一些傳統(tǒng)的需要人工檢測的行業(yè),開始逐漸采用自動(dòng)化的智能檢測方式。比如,使用相機(jī)代替人眼去觀察檢測的對象;采用程序算法來模擬人的意識進(jìn)行判斷,針對圖像信息進(jìn)行分析推理,得到圖像處理結(jié)果。
正運(yùn)動(dòng)技術(shù)將攜帶自主研發(fā)的一款VPLC視覺運(yùn)動(dòng)控制器全力支持機(jī)器視覺自動(dòng)化檢測行業(yè)的發(fā)展,為各行各業(yè)的專業(yè)人士提供機(jī)器視覺+運(yùn)動(dòng)控制的解決方案。
相機(jī)拍攝圖像時(shí),圖像發(fā)射的光通過鏡頭在CCD 上成像,光到達(dá) CCD 的某個(gè)像素時(shí),將根據(jù)光的強(qiáng)度產(chǎn)生相應(yīng)的電荷將該電荷的大小讀取為電信號,即可獲得各像素上光的強(qiáng)度(即像素濃度值,也可以叫灰度值)。
| 對比分析 | 人工檢測 | 機(jī)器視覺檢測 |
| 環(huán)境 | 接觸性測量,會(huì)對工件造成接觸性損傷;無法應(yīng)對惡劣危險(xiǎn)環(huán)境。 | 非接觸性測量,無需與工件進(jìn)行接觸,能夠適應(yīng)惡劣危險(xiǎn)生產(chǎn)環(huán)境。 |
| 效率 | 檢測人員很容易出現(xiàn)疲勞而導(dǎo)致檢測效率降低。 | 一般情況下機(jī)器視覺的效率可比人工檢測的速度快5-20倍。 |
| 觀測精度 | 能發(fā)現(xiàn)最小瑕疵0.3mm。 | 檢測精度可達(dá)到千分之一英寸。 |
| 成本 | 長期投入,用人成本逐年上升,工人招聘和管理越來越難。 | 器件價(jià)格逐年降低,投入成本逐漸減少,前期投入大,長期發(fā)展成本低。 |
| 信息集成 | 人工檢測在面對不同的檢測內(nèi)容時(shí),只能通過多工位合作協(xié)調(diào)完成,而不同員工檢測標(biāo)準(zhǔn)不一,極容易出現(xiàn)誤檢的情況。 | 機(jī)器視覺可以通過多工位測量方式,一次性完成待檢產(chǎn)品的輪廓、尺寸、外觀缺陷、產(chǎn)品高度等多技術(shù)參數(shù)的測量。 |
| 客觀性 | 情緒帶來的主觀性,檢測結(jié)果會(huì)隨檢測人員心情的好壞產(chǎn)生變化。 | 機(jī)器沒有喜怒哀樂。 |
| 感光范圍 | 只可看見在400nm-750nm范圍的可見光。 | 能感應(yīng)從紫外到紅外的較寬光譜范圍,另外有X光等特殊攝像機(jī)。 |
| 數(shù)字化 | 需要人工手動(dòng)一一添加測量數(shù)據(jù)。 | 機(jī)器視覺工作過程中產(chǎn)生的所有測量數(shù)據(jù),均可獨(dú)立拷貝或以網(wǎng)絡(luò)連接方式拷出,便于生產(chǎn)過程統(tǒng)計(jì)和分析。 |
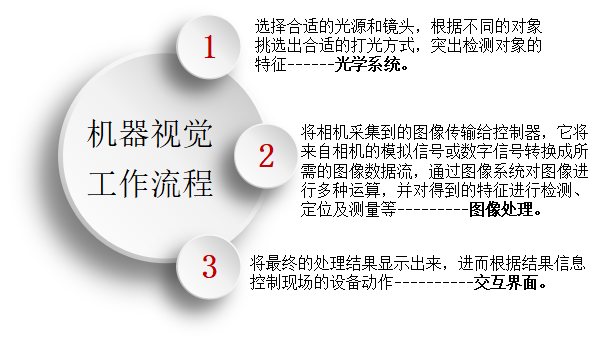
機(jī)器視覺的工作原理是使用光學(xué)系統(tǒng)和圖像處理設(shè)備來模擬人類視覺功能,從采集到的目標(biāo)圖像中提取信息并進(jìn)行處理,獲取所需的檢測對象信息,并加以分析和判斷,將最終結(jié)果告知給硬件設(shè)備進(jìn)行機(jī)器設(shè)備,以指引機(jī)器設(shè)備的下一步動(dòng)作。
一個(gè)完整的機(jī)器視覺系統(tǒng)由多個(gè)模塊組成,一般包括光學(xué)系統(tǒng)(光源、鏡頭、相機(jī))、圖像處理系統(tǒng), 交互界面等。
對于機(jī)器視覺項(xiàng)目來說,檢測實(shí)現(xiàn)的前提就是圖像輸入,而圖像輸入離不開工業(yè)相機(jī)。相機(jī)是一種將光信號轉(zhuǎn)化為數(shù)字信號或模擬信號的工具,是采集圖像的重要設(shè)備,是機(jī)器視覺系統(tǒng)中的核心部件。
相機(jī)廣泛應(yīng)用于各個(gè)領(lǐng)域,尤其是用于生產(chǎn)監(jiān)控、測量任務(wù)和質(zhì)量控制等。工業(yè)數(shù)字相機(jī)通常比常規(guī)的標(biāo)準(zhǔn)數(shù)字相機(jī)更加堅(jiān)固耐用。工業(yè)生產(chǎn)的環(huán)境決定了工業(yè)相機(jī)必須能夠應(yīng)對各種復(fù)雜多變的外部影響,如應(yīng)用于高溫、高濕、粉塵等惡劣環(huán)境。
1.分辨率
分辨率代表鏡頭記錄物體細(xì)節(jié)的能力,以每毫米能夠分辨黑白對線的數(shù)量為計(jì)量單位,“線對/毫米(lp/mm)”,分辨率越高的成像越清晰。我們常說的顯示分辨率是屏幕圖像的精密度,指圖形所能顯示像素有多少。分辨率高帶來的圖像數(shù)據(jù)量就大,一般分辨率大的相機(jī),幀率一般都不會(huì)太高,常見相機(jī)像素分辨率如下:
640x480=307200(30萬)
1280×1024=1310720(130萬)
1600×1200=1920000(200萬)
2560×1920=4915200(500萬)
3672×2754=10112688(1000萬)
2.像素深度(Pixel Depth)
即每像素?cái)?shù)據(jù)的位數(shù),一般常用的是8Bit,一幅彩色圖像的每個(gè)像素用R,G,B三個(gè)分量表示,若每個(gè)分量用8位,那么一個(gè)像素共用24位表示,就說像素的深度為24,每個(gè)像素可以是224種顏色中的一種。在這個(gè)意義上,往往把像素深度說成是圖像深度。表示一個(gè)像素的位數(shù)越多,它能表達(dá)的顏色數(shù)目就越多,而它的像素深度就越深。
3. 最大幀率(Frame Rate)/行頻(Line Rate)
相機(jī)采集傳輸圖像的速率,對于面陣相機(jī)一般為每秒采集的幀數(shù)(Frames/Sec.),對于線陣相機(jī)為每秒采集的行數(shù)(Lines/Sec.)。
4. 曝光方式(Exposure)和快門速度(Shutter)
對于線陣相機(jī)都是逐行曝光的方式,可以選擇固定行頻和外觸發(fā)同步的采集方式,曝光時(shí)間可以與行周期一致,也可以設(shè)定一個(gè)固定的時(shí)間;面陣相機(jī)有幀曝光、場曝光和滾動(dòng)行曝光等幾種常見方式,數(shù)字相機(jī)一般都提供外觸發(fā)采圖的功能。快門速度一般可到10微秒,高速相機(jī)還可以更快。
5. 光譜響應(yīng)特性(Spectral Range)
是指該像元傳感器對不同光波的敏感特性,一般響應(yīng)范圍是350nm-1000nm,一些相機(jī)在靶面前加了一個(gè)濾鏡,濾除紅外光線,如果系統(tǒng)需要對紅外感光時(shí)可去掉該濾鏡。
6.接口類型
有Camera Link接口,以太網(wǎng)接口,1394接口、USB接口等。
| 工業(yè)相機(jī) | 常見民用相機(jī) | |
| 英文名 | Industrialcamera | Digitalstillimagecameras |
| 組成部分 | 光學(xué)成像系統(tǒng)、圖像傳感器及外圍電路、相機(jī)核心圖像采集處理系統(tǒng)、圖像緩存及輸出系統(tǒng)等。 | 光學(xué)鏡頭系統(tǒng)、電子快門系統(tǒng)、電子測光及操作裝置、光電傳感器(CCD或CMOS)、模/數(shù)轉(zhuǎn)換器、圖像處理單元(DSP)、圖像存儲器、液晶顯示屏及輸出控制單元(連接端口)等。 |
| 掃描方式 | 逐行掃描。 | 隔行掃描,甚至是隔三行掃描。 |
| 拍攝速度 | 快(每秒可拍攝十幅到幾百幅圖像)。 | 慢(每秒只能拍攝2-3幅圖像)。 |
| 輸出圖像質(zhì)量 | 圖像質(zhì)量高,輸出的圖像是裸數(shù)據(jù),器光譜范圍較寬,較適用于進(jìn)行高質(zhì)量的圖像處理算法。 | 圖像質(zhì)量較差,因經(jīng)過了MPEG壓縮,輸出圖像的光譜范圍只適用于人眼視覺。 |
| 數(shù)字處理方式 | 邊拍攝邊把圖像傳送到其他設(shè)備用于后期處理,可長時(shí)間工作(幾天甚至幾個(gè)月)。 | 拍攝后由DSP對數(shù)字圖像信號進(jìn)行優(yōu)化處理(白平衡、彩色平衡、伽馬校正與邊緣校正等),并經(jīng)過壓縮后存儲于相機(jī)內(nèi)部。 |
| 控制方式 | 通常由計(jì)算機(jī)來控制其拍照、錄像、調(diào)整參數(shù)等功能。 | 由人工控制其拍照、錄像、調(diào)整參數(shù)等功能。 |
| 用途 | 通常用于機(jī)器視覺(如機(jī)器人)、工業(yè)檢測、公共安全、交通監(jiān)控等。 | 通常用于家庭或攝影記者等。 |
| 數(shù)據(jù)接口 | GigE、Camera Link、USB3.0、1394等接口。 | 1394、USB2.0等接口。 |
| 外觀結(jié)構(gòu) | 相機(jī)結(jié)構(gòu)緊湊、結(jié)實(shí)并且不易損壞,能在較為惡劣的環(huán)境中使用。 | 較為精致,便于攜帶。 |
正運(yùn)動(dòng)技術(shù)的VPLC516E是一款內(nèi)嵌開放式Linux系統(tǒng)的視覺運(yùn)動(dòng)控制器,是國內(nèi)首款嵌入式運(yùn)動(dòng)控制+機(jī)器視覺于一身的一體機(jī)。
ZDevelop是正運(yùn)動(dòng)技術(shù)自主開發(fā)的調(diào)試軟件,通過它用戶能夠很容易的對控制器進(jìn)行配置快速開發(fā)應(yīng)用程序以及對運(yùn)動(dòng)控制器正在運(yùn)行的程序進(jìn)行實(shí)時(shí)調(diào)試,ZDevelop軟件可通過使用串口或網(wǎng)口連接控制器,程序下載到控制器時(shí)可選ROM掉電保存下載或RAM掉電不保存下載方式,掉電保存的程序可以直接脫機(jī)運(yùn)行。
支持四種編程方式,分別為Zvision、ZBasic、ZPLC梯形圖、ZHMI組態(tài)界面,使用ZDevelop軟件編寫的程序可以下載到正運(yùn)動(dòng)控制器里,也可以在PC平臺仿真運(yùn)行。
ZVision Basic是正運(yùn)動(dòng)技術(shù)自主開發(fā)的視覺編程語言,通過視覺指令在ZDevelop軟件中進(jìn)行視覺程序的開發(fā),編寫完項(xiàng)目程序后可直接下載入VPLC控制器進(jìn)行操作。
ZVision Basic語言具有標(biāo)準(zhǔn)的命名規(guī)則,簡單易懂,能夠用簡短的視覺指令就能完成視覺功能的實(shí)現(xiàn),目前支持視覺定位,視覺測量,數(shù)據(jù)碼識別,Blob塊狀物檢測,缺陷檢測等多種視覺算子。
下面介紹一個(gè)簡單的圖像處理的例子。首先在ZDevelop中利用圖像采集接口,使用網(wǎng)口相機(jī)實(shí)時(shí)拍攝圖像。采集到圖像后對圖像進(jìn)行簡單的閾值分割處理,將有物體的區(qū)域標(biāo)記出來,進(jìn)行對圖像中的區(qū)域統(tǒng)計(jì)零件數(shù)量
(1)首先在ZDevelop新建hmi界面,創(chuàng)建一個(gè)圖片元件窗口,設(shè)置相關(guān)的鎖存通道編號。
(2)采集圖像,如果需要連續(xù)地采集圖像,要建立圖像采集循環(huán)在循環(huán)中使用。
(3)簡單處理圖像。獲取到圖像保存到GrabImg變量中,接下來根據(jù)圖像進(jìn)一步處理,接下來根據(jù)圖像進(jìn)一步處理,如二值化處理、膨脹、腐蝕、開閉運(yùn)算等處理,以獲取到清晰的圖像質(zhì)量為主。本例中相機(jī)使用的是黑白相機(jī),如果使用的是彩色相機(jī)則需要通過ZV_RGBTOGRAY將原始圖像改為單通道的灰度圖像,開始生成整個(gè)圖像的區(qū)域,對整個(gè)圖像的區(qū)域進(jìn)行二值處理,將區(qū)域中黑色部分提取出來存放到區(qū)域變量中。
(4)接著使用ZV_RECONNECT指令計(jì)算生成連通區(qū)域列表,通過ZV_REFILTER指令將列表中面積合適的區(qū)域提取出來,排除干擾的小雜點(diǎn),提取出每個(gè)區(qū)域并且進(jìn)行繪制ZV_REGION將區(qū)域繪制出來。
(5)零件數(shù)量獲取使用ZV_LISTCOUNT,將區(qū)域列表中的數(shù)量獲取到寄存器TABLE 數(shù)組TABLE(0)中。
原文標(biāo)題:VPLC系列機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)快速入門(一)
文章出處:【微信公眾號:工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
plc
+關(guān)注
關(guān)注
5016文章
13387瀏覽量
465374 -
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4405瀏覽量
120729
原文標(biāo)題:VPLC系列機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)快速入門(一)
文章出處:【微信號:gkongbbs,微信公眾號:工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
DELTA并聯(lián)機(jī)械手視覺方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎(jiǎng) #正運(yùn)動(dòng)技術(shù) #機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)
工業(yè)一體機(jī)在工業(yè)視覺設(shè)備中的應(yīng)用
高集成機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)VPLC712!


瑞迅科技瑞芯微RK3588系列工控一體機(jī),CPU強(qiáng)大,6TOPS算力的高性能神經(jīng)網(wǎng)絡(luò)處理器單元 #工控一體機(jī)
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料應(yīng)用

機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料的應(yīng)用#機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)
聚徽-工控一體機(jī)有什么創(chuàng)新
藍(lán)海華騰參股公司頂控科技發(fā)布運(yùn)動(dòng)控制一體機(jī)系列產(chǎn)品
機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)VPLC532E在汽車膠帶纏繞的開放式CNC應(yīng)用

VPLC系列機(jī)器視覺運(yùn)動(dòng)控制一體機(jī)在五軸聯(lián)動(dòng)點(diǎn)膠上的應(yīng)用
聚徽觸控-工控一體機(jī)和 PLC 一體機(jī)有什么不同






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論