 基于CAN總線技術和GSM網絡實現車輛智能監控系統的設計
基于CAN總線技術和GSM網絡實現車輛智能監控系統的設計
引言
近年來,隨著我國經濟的高速發展及汽乍保有量和駕駛員總數的快速增長,道路交通事故數一直居高不下,道路交通狀況日趨復雜和惡化。群死群傷特大惡性道路交通事故時有發生,給人們的牛命安全和家庭幸福造成了極大的影響。因此,加強車輛管理就顯得尤為重要。而交通安全主要由兩方面來保證,一是車輛具有良好的車況,另一方面是駕駛員規范的操作。因此如何監控管理車輛和規范駕駛員操作是當前迫切需要解決的問題。
汽車行駛記錄儀,又稱“汽車黑匣子”,是對車輛行駛速度、時間、里程以及有關車輛行駛的其他狀態信息進行記錄、存儲并可通過接口實現數據輸出的數字式電子記錄裝置。然而行駛記錄儀不能實時地向監控中心傳回車輛的運行情況,屬于事后監督,因此在預防交通安全事故方面所起的作用有限。基于GPS/GSM的車輛監控系統能夠實時地獲得車輛的位置、速度等信息,為車輛的實時監控提供了一種有效途徑。但是GPS卻無法獲得諸如氣壓、水溫、轉速等重要車況信息,因此對車輛的監控缺乏全面性。
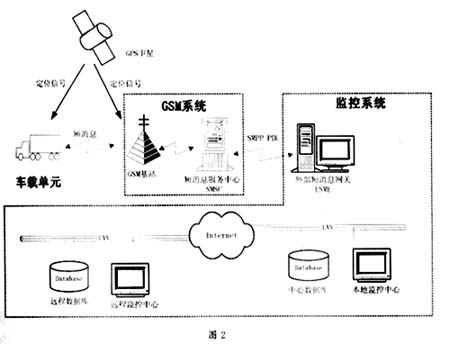
基于CAN/GSM的車輛監控管理系統,是為具有CAN總線的汽車開發的。該系統的車載監控設備首先從車輛的CAN接口上獲得詳細的車況信息,然后依托我國目前最成熟、應用最廣的GSM移動通信系統與監控中心進行通信,來實現對車輛全面、動態、實時的監控。使用CAN總線,不僅可獲得全面、詳細的車況信息,而且使系統具有很強的擴展性,例如,可以將GPS模塊作為CAN的一個智能節點掛接在總線上,這樣系統就具備了監控車輛位置的能力。
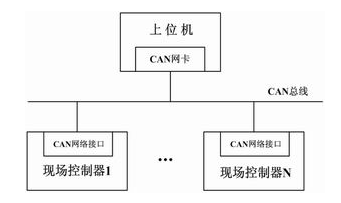
1 CAN總線技術
為了實現現代汽車中龐大的電子控制裝置之間的通信,減少不斷增加的信號線,因此在信息傳輸方面上必須采用總線的方式進行傳輸。 CAN(Controller Area Network)總線正是現今流行的一種較為先進的、性能出色的現場總線技術。它是80年代初德國Bosch公司為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議,是一種多主總線,通信接口集成了CAN協議物理層和數據鏈路層功能,可對通信數據進行幀處理。CAN通過對通信數捌塊進行編碼,保證了網絡內節點個數的動態性,并使不同的節點同時接收到相同的數據。數槲段長度最多為8個字節,保證了通信的實時性;而協議利用 CRC檢驗提供相應的錯誤處理功能,能夠保證數據通信的可靠性。由于CAN技術規范僅包括物理層和數據鏈路層說明,并未對應用層的功能和實現進行定義,因此,用戶既可以采用國際CAN總線用戶及制造商協會或其他一些組織制定的開放式高層協議,也可以住工程中靈活地實現自己的應用層。在十多年的應用過程中,CAN以其極高的可靠性、實時性和靈活性,在工業過程監控設備的互連方面獲得了廣泛的應用,得到了英特爾、摩托羅拉、菲利浦、西門子等百余家國際著名大公司的支持,被公認為是最有前途的現場總線之一。本系統利用CAN總線的以上特性,減少了車內的線束,解決了眾多節點之間的通信問題。
2 車輛監控管理系統設計
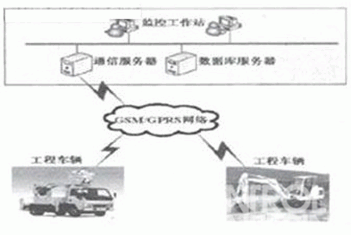
2.1 系統設計
本車輛智能監控系統是利用CAN總線技術采集車輛的各種信息,例如車輛每次的起動時間、行駛里程、行駛時間、最高車速以及每次最高車速的持續時間,儲存停車前20秒的車輛信息。然后利用現存的GSM網絡,將信息以短消息的形式傳送給監控中心,以實現對車輛的實時監控。
2.2 硬件設計
車載監控設備的主控芯片采用飛思卡爾(Freescale)公司為汽車電子應用而開發的16位單片機MC9S12HZ。該單片機與車載監控設備相關的主要資源有:32~256K的Flash、2~12K的RAM和1~2K的EEPROM;2個可兼容CAN2.0A、B速率可達lMb/s的CAN控制器;2 個全雙工異步串行通信接口;32×4段LCD驅動器。
由MC9S12HZ構成的車載監控設備硬件連接示意圖如圖2所示。與CAN總線的接口方面,我們采用恩智浦(NXP)公司的高速CAN收發器 TJAl050,為了提高電EMC和ESD性能,在電路中還加入了共模扼流圈L40和ESD保護二極管D39。
GSM模塊采用了兩門子的TC35i,該模塊通過40腳的ZIF(Zero Insertion Force)接口與外部控制器建立連接。監控系統僅使用了GSM網絡的SMS業務,因此主控芯片與TC35i僅需要其中的TXD和RXD兩個管腳就夠了,主控制器MC9S12HZ通過AT命令實現塒TC35i的控制。
單片機與TC35i之問通過串口進行通訊,TC35i支持的自動波特率范圍為1200~230400B/s。我們選用9600B/s的波特率。由 TC35i手冊可知,其串行接口需要CMOS電平,而MC9S12HZ是TTL電平,因此需要電平轉換電路,如圖2所示。監控中心由PC機與TC35i模塊組成,它們之間的電平轉換由電平轉換芯片MAX232完成。
2.3 軟件設計
在CAN總線上傳輸的車輛運行參數非常多,數據量很大,而GSM網絡的SMS業務傳輸速度有限,因此不可能將CAN總線上的所有信息都傳回監控中心。實際上也沒有必要監控所有的車輛運行參數,只要監控我們最關心的、與行車安全關系最緊密的一些參數就足夠了。
對于不同的參數,監控的形式是不同的,有些信息需要定時地進行監控,比如車輛位置信息,而有些信息只有在超出正常范圍時才需要發送,如車速或轉速信息等。此外,對于不同車型,需要監控的參數也是有區別的;或者對于同一個參數,在不同的情況下,其監控形式和監控范圍也會發生變化。因此要求車載監控設備可以動態地改變監控參數和監控形式。
為了實現對車輛的動態監控,在車載監控設備的控制器中建立了一個監控列表。列表中的每一項包含參數群編號PGN、監控參量在該PGN中的位置、監控的形式及監控時間間隔和監控參數范圍等。這個參數列表的項目可以根據監控中心發來的命令進行動態的增加或刪除,從而實現對車輛的動態監控。
車載監控設備的軟件主程序流程如圖3所示。串行通信的收發程序及CAN總線的監聽程序放在中斷程序中完成,當接收到相應命令或數據后,將數據放入緩沖區并設置相應的標志位,主程序通過查詢這些標志位來執行相應的動作。主程序首先讀取存儲在片內EEPROM中的默認臨控列表,并根據監控列表中的PGN,設置 MC9S12HZ的CAN ID報文標識符濾波及掩模寄存器。程序可根據命令動念地修改監控參數列表,并根據命令決定是否更改EEPROM中的默認臨控列表。當要監控的PGN有新數據時,要判斷該數據是否符合發送條件,這些條件包括定時間隔到、監控變量值是否超正常范圍等,如果符合發送條件,則將該PGN及其對應的數據添加到發送列表中。
3 結束語
本系統利用CAN總線技術來獲得車輛的各種詳細信息,并且應用GSM網絡與監控系統進行通信,不僅實現了對車輛監控參數的動態設置,還由于CAN總線技術的采用,使得通過增加CAN的智能節點來擴展監控對象變得很容易。這就大大提高了監控系統的靈活性和全面性。同時利用GSM短消息業務進行數據傳送,連接簡單,費用低廉,覆蓋范圍廣。
責任編輯:gt
-
CAN總線
+關注
關注
145文章
1955瀏覽量
131091 -
gps
+關注
關注
22文章
2903瀏覽量
166739 -
監控系統
+關注
關注
21文章
3940瀏覽量
176842
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論