 一文匯總SIMO雷達的基礎基礎知識
一文匯總SIMO雷達的基礎基礎知識
雷達主要用于探測并定位目標,它通過發射特定種類的波形,對回波信號進行檢測,從而達到探測目標的目的。通過對雷達進行設計,能夠使其穿透一些極端條件,例如黑暗,薄霧,煙霧,雨水,降雪等,這些往往都是人的視線無法看到的。雷達還具有能夠測量目標距離和速度等參數的優點。
雷達在軍事、民用和科技等領域均有廣泛運用,例如用于大氣監測,地表探測,跟蹤和導航,天氣監測,地球觀測等。
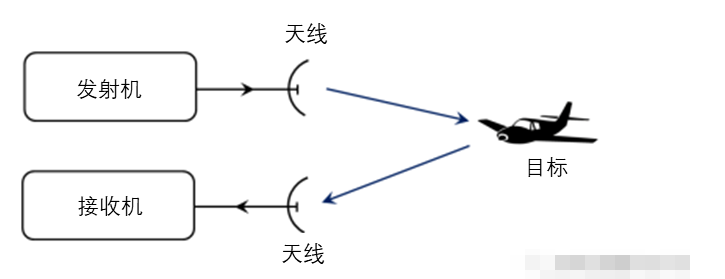
圖1 基本雷達構成的框圖
圖1示出了一種基本的雷達構成:一個發射電磁波的發射天線,一根接收天線以及處理數據并發現目標的器件。發射信號的一部分被目標截獲并向所有方向再次輻射出去,接收天線將返回的電磁能量收集起來,發送給下一級的接收機,接收機對數據進行處理,從而發現目標,同時提取目標的相關參數。
盡管合適的電磁波調制方式有很多,大多數雷達還是采用了脈沖調制的信號來滿足對目標的探測與定位。
雷達信號包含的信息
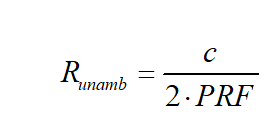
距離
如圖2所示,雷達與目標之間的距離用r表示,它可以通過電磁波在雷達與目標之間的雙重傳播延時經下式計算得出:
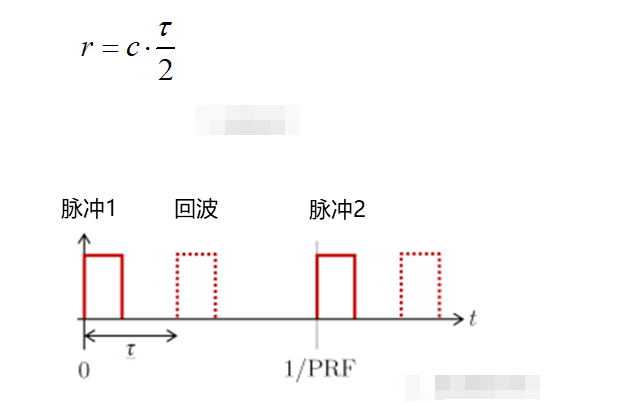
圖2 雷達脈沖傳播的示意圖
信號的傳播速度通常對應光速c。系統的最大不模糊距離受脈沖重復頻率的限制:
系統的距離分辨率,即兩個相鄰目標的最小可分辨距離,與信號帶寬成反比。
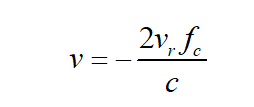
速度
由于多普勒效應的存在,目標相對于雷達的徑向速度 會使得接收到的信號產生一個相移,表現為接收信號的頻移:,其中為信號載頻。
方向(方位向或俯仰向)
通過使天線形成特定的方向圖,能夠在每一時刻都將發射功率集中在某個特定方向上。因此,雷達天線波束的指向給出了該角度上目標的信息。這個角度可以是方位向(雷達與目標連線在水平面上投影的角度)和/或俯仰向(雷達與目標連線與水平面之間的角度)。
極化
極化雷達具有估計接收信號極化方式(水平極化,垂直極化,圓極化等)的能力。這使得雷達系統提供了諸如確定和/或區分環境(植被,建筑等)中不同種類結構的可能性。實際上,取決于被照射物體的材料和幾何形狀,接收信號的極化會受到不同的影響。
SIMO單輸入多輸出雷達
SIMO雷達的發射天線通常是陣列天線,由若干個獨立的陣元組成,需要對這些陣元進行合適的排布,使其間距等于載波波長或等于載波波長的一半。通過對每個陣元的激勵信號的相對幅度和相位進行獨立地調控,當所有陣元同時發射時,就能夠獲得期望的輻射方向圖(例如筆型波束,寬波束)。這種天線被稱作相控陣天線。
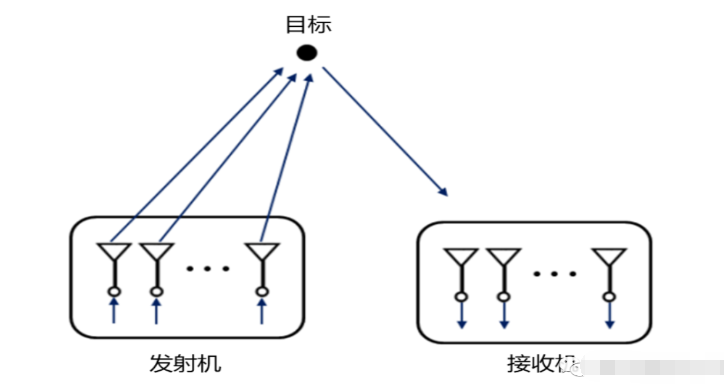
欲使陣列天線的波束對空間進行掃描,可以采用使整個陣列天線所在機械結構轉動的方式。然而,通過改變天線陣元之間激勵電流的相對相位的方式對波束指向進行操控,能夠更方便地使波束指向特定的方向。
傳統的相控陣雷達只能發射固定的波形,而只在幅度上做文章(放大或縮小其幅度)。由于只發射單一的波形——盡管有多個發射陣元——相控陣雷達也被稱作SIMO(單輸入多輸出)雷達。
在接收中采用陣列天線的情況下,天線的方向性可以通過數字波束形成(DBF)技術形成,這包括以數字方式形成多個同時聚焦的波束。
雷達探測
典型的用于探測傳統飛行器的雷達發射的信號通常具有幾微秒的脈沖寬度和幾百Hz的脈沖重復頻率。發射機產生調制后的射頻脈沖,經過傳輸線到達天線,由天線將脈沖信號輻射到空間中。
輻射能量的一部分經由目標反射回來,被雷達接收機捕獲。接收到的信號在前端進行預處理,典型的雷達前端由如下幾部分構成:低噪聲放大器和濾波器,下變頻器和模數轉換器(對模擬信號進行采樣和量化)。
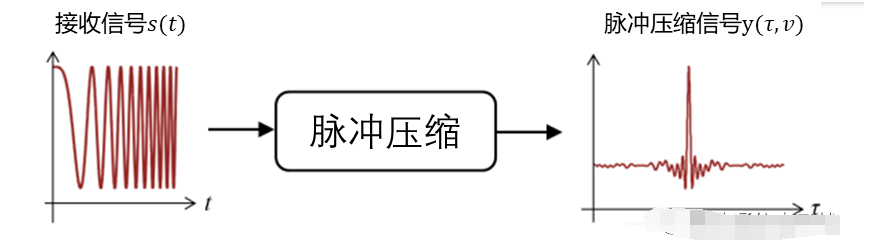
圖3 脈沖壓縮示意圖
為了從含有噪聲的回波信號中檢測出目標的存在,必須要對信號中目標的反射信號和噪聲進行區分,這就是信號處理中脈沖壓縮階段的目的,此階段采用匹配濾波器(MF)對發射脈沖進行匹配。如圖3所示,匹配濾波器的輸出是接收信號和發射信號的互相關函數,可以用下式表示:

目標的距離參數可以從脈沖的傳播延時(“快時間”)中直接估計,速度參數通常從脈沖間(“慢時間”)的相位變化進行估計。目標的方位信息通過天線的指向進行估計,其精度取決于天線的方向性的好壞。
需要注意的是,雷達前端的性能會受限于噪聲,因為雜波的電磁能量會大幅影響接收機檢測期望的回波信號的能力。這些雜波可能產生于接收機的內部,也可能疊加在期望的回波信號上,由接收天線一起接收到。
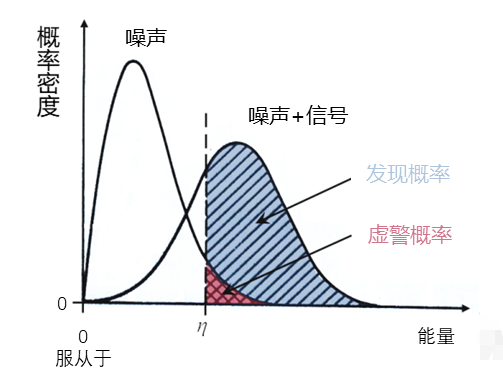
圖4 噪聲的概率密度函數、噪聲和信號混疊時的概率密度函數
為了判斷是否有目標存在,需要在匹配濾波器的輸出端設置一個檢測閾值,當脈沖壓縮后的能量超過了閾值,則認為有目標存在。閾值的設置需要在虛警概率(噪聲通過匹配濾波器后,輸出能量超過閾值的概率)和發現概率(目標存在時,匹配濾波器的輸出能量超過閾值的概率)之間做一個權衡。如圖4所示,較小的閾值選取能夠增加檢測概率并且降低虛警概率,反之亦然。
責任編輯人:CC
-
雷達
+關注
關注
50文章
2966瀏覽量
118022 -
SIMO
+關注
關注
0文章
10瀏覽量
4493
發布評論請先 登錄
相關推薦
電鍍的基礎知識匯總
一文匯總PMR的基礎知識







 工商網監
工商網監
評論