") 一種基于仿生復(fù)眼的高密度陣列曲面三維觸覺(jué)傳感器
一種基于仿生復(fù)眼的高密度陣列曲面三維觸覺(jué)傳感器
如果機(jī)械手擁有人手一樣靈敏的觸覺(jué)系統(tǒng),那么機(jī)械手將義肢、精細(xì)操作以及電子皮膚方面有更重要應(yīng)用。但是,人的指尖觸覺(jué)感受器的密度非常高,達(dá)到140個(gè)/cm2,而現(xiàn)有觸覺(jué)傳感器的密度很低。為了提高三維觸覺(jué)傳感器的密度,天津大學(xué)精密儀器與光電子工程學(xué)院的宋樂(lè)、朱歡、鄭葉龍、趙美蓉、房豐洲,以及馬來(lái)亞大學(xué)的池德閣等人受到昆蟲(chóng)復(fù)眼啟發(fā),研制了一種基于仿生復(fù)眼的高密度陣列曲面三維觸覺(jué)傳感器,其密度可達(dá)42個(gè)/cm2。該觸覺(jué)傳感器可以檢測(cè)法向力和剪切力,該傳感器將為手術(shù)機(jī)器人的力測(cè)量提供技術(shù)依據(jù)。
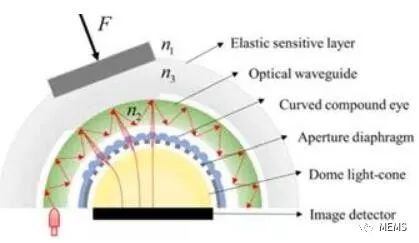
圖1 仿生復(fù)眼
為了解決上述問(wèn)題,本文在仿生復(fù)眼的啟發(fā)下,提出了一種基于光能分布法的復(fù)眼陣列式曲面光波導(dǎo)觸覺(jué)傳感器,該系統(tǒng)空間分辨力高、畸變小。采用曲面復(fù)眼能夠保證各個(gè)方位角的接觸力信息被均勻接收,采用光錐可以將曲面圖像無(wú)損轉(zhuǎn)換為平面圖像。觸覺(jué)傳感器主要包括曲面彈性敏感層,復(fù)眼陣列、光纖光錐、圖像傳感器以及光纖光源。彈性敏感層將三維觸覺(jué)力轉(zhuǎn)換為光能信息,接觸產(chǎn)生的泄露光通過(guò)復(fù)眼、光纖光錐,最后在圖像傳感器上成像。根據(jù)圖像傳感器上的光能分布得到三維觸覺(jué)力的作用方向和大小,利用光闌可以減少相鄰子眼之間的耦合誤差。該觸覺(jué)傳感器中的彈性敏感層和曲面復(fù)眼以及光纖光錐同球心,有利于觸覺(jué)傳感器的集成化。
當(dāng)外界載荷施加在彈性敏感層上,彈性敏感層產(chǎn)生變形后與光波導(dǎo)外側(cè)產(chǎn)生接觸,由于接觸區(qū)域不滿足全內(nèi)反射條件,在光波導(dǎo)的內(nèi)側(cè)會(huì)產(chǎn)生泄露光,泄露光經(jīng)過(guò)復(fù)眼、光闌,最后用CCD接收。因?yàn)閺椥悦舾袑拥牟牧鲜枪枘z,所以本文提出的三維觸覺(jué)力測(cè)量系統(tǒng)具有較高的靈活性,可通過(guò)更換不同硬度的彈性敏感層來(lái)適應(yīng)不同的力值測(cè)量范圍,所采用的彈性敏感層的硬度為邵氏A40,以及將圖像的灰度值作為法向力測(cè)量的特征參量,圖像的形心位移作為剪切力測(cè)量的特征參量。
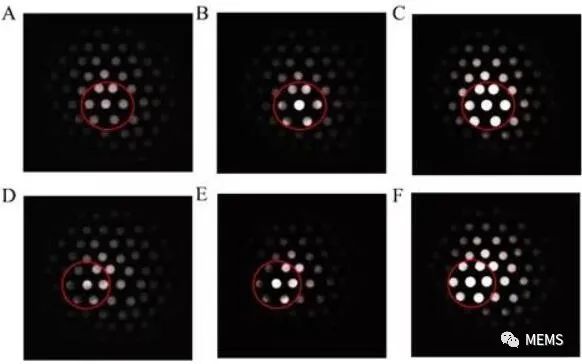
圖2 法向力和剪切力實(shí)驗(yàn)
對(duì)彈性敏感層不同位置處進(jìn)行法向力實(shí)驗(yàn),對(duì)標(biāo)定實(shí)驗(yàn)曲線進(jìn)行三次多項(xiàng)式擬合,可以得到彈性敏感層不同位置處的曲線的擬合系數(shù)分別是0.9999,0.9999,0.9999,0.9992,0.9997,這也說(shuō)明了彈性敏感層具有各向同性。在彈性敏感層的不同位置進(jìn)行剪切力實(shí)驗(yàn),其剪切力角度范圍為[-10° 10°]。以頂點(diǎn)處的剪切力實(shí)驗(yàn)為例,對(duì)標(biāo)定曲線進(jìn)行指數(shù)型擬合,剪切力的角度分別為-5°、5°時(shí)曲線的擬合系數(shù)均為1,角度為10°、10°時(shí)曲線的擬合系數(shù)均為0.9999。這也就說(shuō)明選用圖像灰度值和形心位移作為特征參量具有合理性和有效性。
為了演示觸覺(jué)傳感器,以普通按鈕開(kāi)關(guān)為實(shí)驗(yàn)樣品。觸覺(jué)感應(yīng)裝置位于按鈕開(kāi)關(guān)的上側(cè),觸覺(jué)感應(yīng)裝置逐漸按下,然后抬起,同時(shí)測(cè)量其力值。當(dāng)壓縮位移為0.5mm、0.8mm和1.0mm時(shí),記錄力值。力值為0.5mm、0.8mm、1mm分別為1.23890±000286、1.6494±0.000981和2.0958±0.000168N。
圖3 機(jī)械手按開(kāi)關(guān)力值測(cè)量
這種新型仿生復(fù)眼高空間靈敏度觸覺(jué)傳感器,對(duì)于需要力值測(cè)量的小型機(jī)器人是很有用的,這也為義肢設(shè)計(jì)提供了一種新的方法。這一研究成果發(fā)表在國(guó)際期刊光學(xué)快報(bào)上:Le Song,Huan Zhu,Yelong Zheng,Meirong Zhao,Clarence Augustine TH Tee,and Fengzhou Fang, “Bionic Compound Eye-Inspired High Spatial and Sensitive Tactile Sensor,”IEEE TRANSACTIONS ON INSTRUMENTATION AND MEASUREMENT,70,7501708(2021)。本文第一作者為天津大學(xué)宋樂(lè)副教授,通訊作者為天津大學(xué)鄭葉龍副教授。該研究得到國(guó)家自然科學(xué)基金(52075384、51805367),天津市自然科學(xué)基金(18JCQNJC04800)的資助。
責(zé)任編輯:lq
-
圖像傳感器
+關(guān)注
關(guān)注
68文章
1918瀏覽量
129702 -
測(cè)量系統(tǒng)
+關(guān)注
關(guān)注
2文章
541瀏覽量
41536 -
觸覺(jué)傳感器
+關(guān)注
關(guān)注
4文章
86瀏覽量
9396
原文標(biāo)題:天津大學(xué):受仿生復(fù)眼啟發(fā)的高空間靈敏度觸覺(jué)傳感器
文章出處:【微信號(hào):MEMSensor,微信公眾號(hào):MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
揭秘高密度有機(jī)基板:分類(lèi)、特性與應(yīng)用全解析

高密度Interposer封裝設(shè)計(jì)的SI分析

一文看懂陶瓷穿孔三維互連(TCV)技術(shù)
我國(guó)科學(xué)家研制出具有仿生三維架構(gòu)的新型電子皮膚系統(tǒng)
混合鍵合+高密度硅通孔,可用于在CMOS圖像傳感器中嵌入人工智能
什么是高密度DDR芯片
什么是三維點(diǎn)云分割
mpo高密度光纖配線架解析
高密度光纖配線架怎么安裝
TIDA-010083-適用于機(jī)器視覺(jué)攝像機(jī)和視覺(jué)傳感器的高密度隔離式PoE 和 GigE PCB layout 設(shè)計(jì)

面向閉環(huán)腦機(jī)接口的柔性高密度微電極陣列綜述
觸覺(jué)傳感器新進(jìn)展:從傳感器制造到高級(jí)應(yīng)用
基于三維超球面的聲學(xué)復(fù)眼裝置,可用于全向?qū)拵盘?hào)增強(qiáng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論