") 淺談傳感器中3種常用算法處理(含實(shí)現(xiàn)代碼)
淺談傳感器中3種常用算法處理(含實(shí)現(xiàn)代碼)
在傳感器使用中,我們常常需要對(duì)傳感器數(shù)據(jù)進(jìn)行各種整理,讓?xiě)?yīng)用獲得更好的效果,以下介紹幾種常用的簡(jiǎn)單處理方法:
1.加權(quán)平滑:平滑和均衡傳感器數(shù)據(jù),減小偶然數(shù)據(jù)突變的影響;
2.抽取突變:去除靜態(tài)和緩慢變化的數(shù)據(jù)背景,強(qiáng)調(diào)瞬間變化;
3.簡(jiǎn)單移動(dòng)平均線(xiàn):保留數(shù)據(jù)流最近的K個(gè)數(shù)據(jù),取平均值;
加權(quán)平滑,使用算法如下:
(新值) = (舊值)*(1 - a) + X * a其中a為設(shè)置的權(quán)值,X為最新數(shù)據(jù),程序?qū)崿F(xiàn)如下:
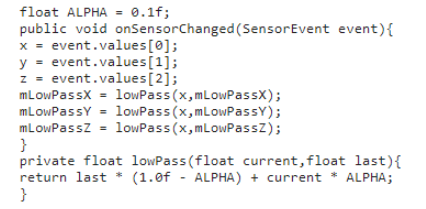
抽取突變采用上面加權(quán)平滑的逆算法
實(shí)現(xiàn)代碼如下:

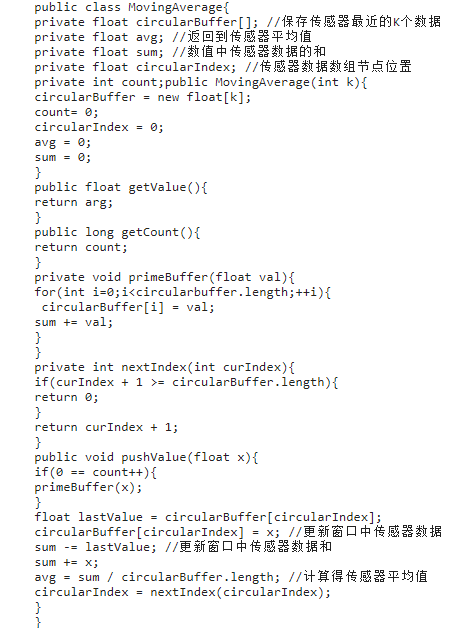
簡(jiǎn)單移動(dòng)平均線(xiàn)
保留傳感器數(shù)據(jù)流中最近的K個(gè)數(shù)據(jù),返回它們的平均值。k表示平均“窗口”的大小;
實(shí)現(xiàn)代碼如下:
編輯:jq
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀(guān)點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
傳感器
+關(guān)注
關(guān)注
2553文章
51395瀏覽量
756609 -
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7139瀏覽量
89581 -
廣義逆算法
+關(guān)注
關(guān)注
0文章
2瀏覽量
839
原文標(biāo)題:傳感器3種常用算法處理(實(shí)現(xiàn)代碼)
文章出處:【微信號(hào):WW_CGQJS,微信公眾號(hào):傳感器技術(shù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
溫度傳感器常用規(guī)格參數(shù)
溫度傳感器是一種用于測(cè)量和記錄溫度的設(shè)備,其廣泛應(yīng)用于各種行業(yè)和領(lǐng)域,如工業(yè)、醫(yī)療、消費(fèi)電子等。為了滿(mǎn)足不同應(yīng)用的需求,溫度傳感器具有多種規(guī)格和參數(shù)。以下是一些溫度傳感器
盤(pán)點(diǎn)環(huán)境電器中常用的傳感器
隨著科技的飛速發(fā)展,傳感器技術(shù)已經(jīng)成為現(xiàn)代環(huán)境電器不可或缺的核心部件。它們能夠精確測(cè)量和感知環(huán)境中的各種物理量,如溫度、濕度、壓力、光強(qiáng)、聲音以及氣體濃度等,并將這些物理量轉(zhuǎn)換為電信號(hào),以便進(jìn)行數(shù)字化
工業(yè)自動(dòng)化中常用的傳感器類(lèi)型
工業(yè)自動(dòng)化是現(xiàn)代制造業(yè)的關(guān)鍵組成部分,它依賴(lài)于各種傳感器來(lái)監(jiān)測(cè)和控制生產(chǎn)過(guò)程。以下是一些在工業(yè)自動(dòng)化中常用的傳感器類(lèi)型,以及它們的主要應(yīng)用和特點(diǎn): 1. 接近
淺談對(duì)霍爾傳感器的誤區(qū)解讀
“霍爾效應(yīng)傳感器通常用于汽車(chē)和工業(yè)系統(tǒng),用于接近檢測(cè)、線(xiàn)性位移檢測(cè)和旋轉(zhuǎn)編碼器等應(yīng)用。目前,現(xiàn)代應(yīng)用對(duì)系統(tǒng)性能的高要求,需要IC 制造商推出高靈敏度精度、集成更多功能、擴(kuò)展可用的
霍爾傳感器是怎么助力現(xiàn)代工業(yè)騰飛的?
霍爾傳感器作為一種能夠檢測(cè)磁場(chǎng)變化的傳感器,憑借其靈敏度高、體積小、功耗低等優(yōu)點(diǎn),在眾多領(lǐng)域得到了廣泛應(yīng)用。本文將深入探討霍爾傳感器的工作原理、類(lèi)型及其在
光纖傳感器在工業(yè)中的應(yīng)用
在現(xiàn)代工業(yè)自動(dòng)化和智能制造的浪潮中,傳感器技術(shù)扮演著至關(guān)重要的角色。光纖傳感器作為一種新型的傳感器
實(shí)現(xiàn)MCU與傳感器的通信方式
在現(xiàn)代電子系統(tǒng)中,微控制器單元(MCU)與傳感器的通信是實(shí)現(xiàn)智能控制和數(shù)據(jù)采集的基礎(chǔ)。隨著技術(shù)的發(fā)展,MCU與
閉環(huán)傳感器與開(kāi)環(huán)傳感器的區(qū)別
傳感器作為現(xiàn)代工業(yè)自動(dòng)化生產(chǎn)過(guò)程中不可或缺的組成部分,在工業(yè)生產(chǎn)和控制系統(tǒng)中扮演著至關(guān)重要的角色。它們的作用是將被測(cè)物理量(如溫度、壓力、振動(dòng)等)轉(zhuǎn)換為電信號(hào)或其他形式的信號(hào),以便于工
智能溫室常用傳感器匯總
智能大棚作為現(xiàn)代農(nóng)業(yè)的重要組成部分,通過(guò)集成物聯(lián)網(wǎng)、信息化和自動(dòng)化技術(shù),對(duì)農(nóng)作物生長(zhǎng)環(huán)境的精準(zhǔn)控制。在這一過(guò)程中,傳感器作為數(shù)據(jù)采集的關(guān)鍵設(shè)備,發(fā)揮著至關(guān)重要的作用。 常用
車(chē)載傳感器主要有哪些傳感器
車(chē)載傳感器是現(xiàn)代汽車(chē)中不可或缺的組成部分,它們?yōu)檐?chē)輛提供關(guān)鍵信息,以確保駕駛安全、提高燃油效率、增強(qiáng)駕駛體驗(yàn)和實(shí)現(xiàn)自動(dòng)駕駛功能。車(chē)載傳感器的
常用遙感傳感器中成像的傳感器是什么
常用遙感傳感器中成像的傳感器主要包括以下幾類(lèi): 一、光學(xué)成像傳感器 多波段掃描儀 :多波段掃描儀是一種
基于MSPM0 MCU實(shí)現(xiàn)采用無(wú)傳感器FOC算法的BLDC和PMSM控制
電子發(fā)燒友網(wǎng)站提供《基于MSPM0 MCU實(shí)現(xiàn)采用無(wú)傳感器FOC算法的BLDC和PMSM控制.pdf》資料免費(fèi)下載
發(fā)表于 09-02 10:21
?2次下載

霍爾傳感器的原理和應(yīng)用領(lǐng)域
霍爾傳感器,作為現(xiàn)代電子技術(shù)中不可或缺的一種傳感器,其基于霍爾效應(yīng)的原理,能夠實(shí)現(xiàn)對(duì)磁場(chǎng)、電流等
關(guān)于在智能手表中常用的傳感器盤(pán)點(diǎn)
傳感器對(duì)于我們生活中的改變還是有很多的,也實(shí)現(xiàn)了生活中的很多新功能,下面就一起來(lái)看看在智能手表中經(jīng)常用到的
傳感器分類(lèi)及20種常見(jiàn)傳感器
傳感器的分類(lèi): 常用傳感器的分類(lèi)? 1. 按被測(cè)物理量分類(lèi) 機(jī)械量: 長(zhǎng)度、厚度、位移、速度、加速度、轉(zhuǎn)數(shù)、質(zhì) 量,重量、力、壓力、力矩;聲: 溫度: 聲壓、噪聲;磁: 磁通、磁場(chǎng);亮度、色彩。溫度





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論