") 基于FPGA的DDS IP實(shí)現(xiàn)線性調(diào)頻信號(hào)的設(shè)計(jì)方案
基于FPGA的DDS IP實(shí)現(xiàn)線性調(diào)頻信號(hào)的設(shè)計(jì)方案
利用DDS IP實(shí)現(xiàn)線性調(diào)頻信號(hào)1 DDS技術(shù)簡(jiǎn)介隨著電子技術(shù)的不斷發(fā)展,傳統(tǒng)的頻率合成技術(shù)逐漸不能滿足人們對(duì)于頻率轉(zhuǎn)換速度、頻率分辨率等方面的追求,直接數(shù)字頻率合成技術(shù)應(yīng)運(yùn)而生。
直接數(shù)字頻率合成技術(shù)(DDS) 是把一系列數(shù)據(jù)量形式的信號(hào)通過(guò)D/A轉(zhuǎn)換器轉(zhuǎn)換成模擬量形式的信號(hào)合成技術(shù)。DDS具有很多優(yōu)點(diǎn),比如:頻率轉(zhuǎn)換快、頻率分辨率高、相位連續(xù)、低功耗、低成本與控制方便。
DDS技術(shù)滿足了人們對(duì)于速度穩(wěn)定性的需求,但是在一些控制較為復(fù)雜的系統(tǒng)中,DDS專用芯片不能很好的貼合要求。利用現(xiàn)場(chǎng)可編程門陣列(FPGA)實(shí)現(xiàn)DDS具有很大的靈活性,基本能滿足現(xiàn)在通信系統(tǒng)的使用要求。
2 DDS IP使用說(shuō)明
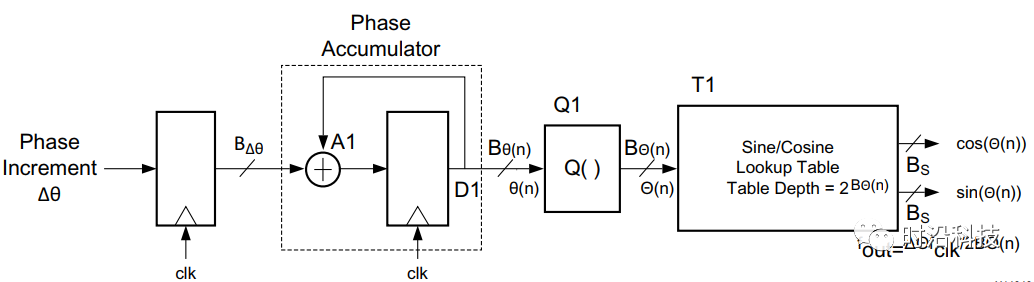
基于FPGA的DDS設(shè)計(jì)方案
3 線性調(diào)頻信號(hào)
3.1 理論介紹
3.1.1 基本概念
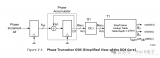
線性調(diào)頻(LFM)信號(hào)是瞬時(shí)頻率隨時(shí)間成線性變化的信號(hào)。線性調(diào)頻信號(hào)也稱為鳥(niǎo)聲(Chirp)信號(hào),因?yàn)槠漕l譜帶寬落于可聽(tīng)范圍,聽(tīng)著像鳥(niǎo)聲,所以又稱Chirp擴(kuò)展頻譜(CSS)技術(shù)。
3.1.2 表達(dá)公式
本文重點(diǎn)研究Xlinx DDS IP實(shí)現(xiàn)線性調(diào)頻信號(hào),主要關(guān)心線性調(diào)頻信號(hào)的相位變化情況,如若想要了解線性調(diào)頻信號(hào)其他方面信息,請(qǐng)參考其他相關(guān)文章。
線性調(diào)頻信號(hào)表達(dá)式:
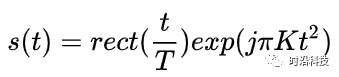
線性調(diào)頻信號(hào)數(shù)學(xué)公式
其中,t是時(shí)間,單位為秒(s);T是脈沖持續(xù)時(shí)間(周期);K是線性調(diào)頻斜率,單位是Hz/s.
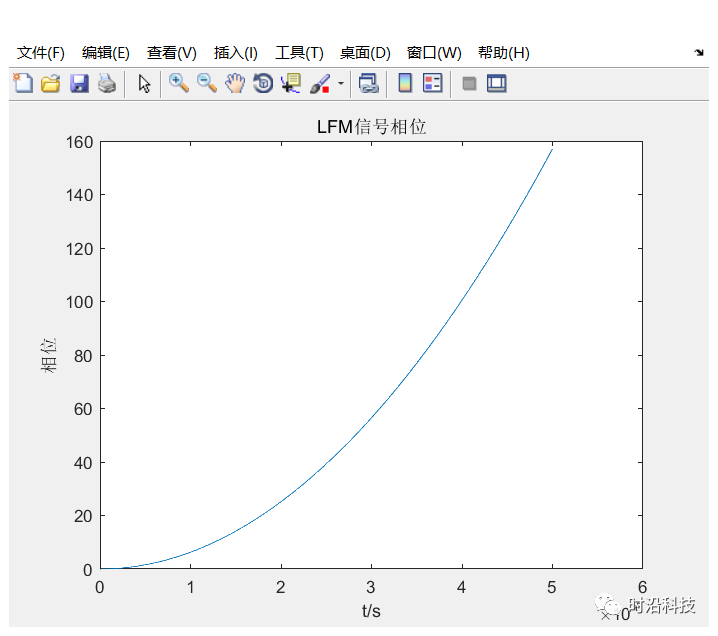
相位表達(dá)式:
φ(t)=πKt^2
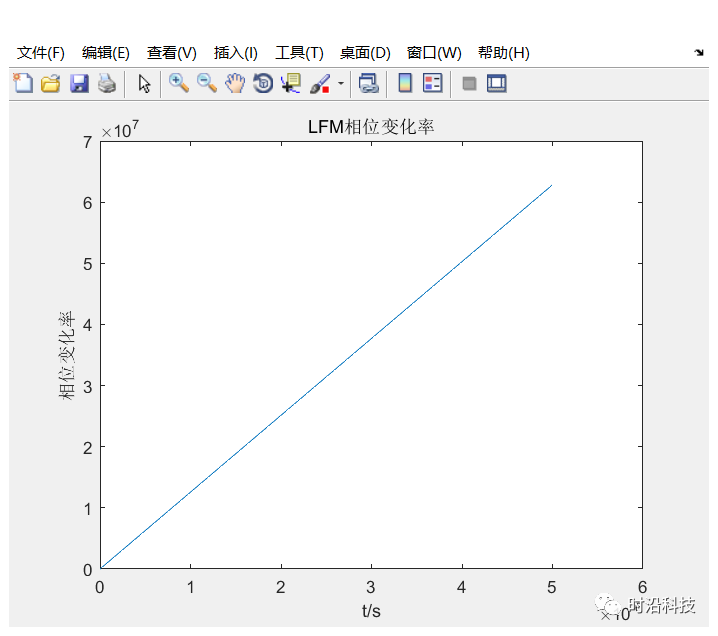
相位變化率:
?φ(t)=2πKt
3.1.3 應(yīng)用范圍
LFM技術(shù)在雷達(dá)、聲納技術(shù)中有廣泛應(yīng)用,例如,在雷達(dá)定位技術(shù)中,它可用來(lái)增大射頻脈沖寬度、加大通信距離、提高平均發(fā)射功率,同時(shí)又保持足夠的信號(hào)頻譜寬度,不降低雷達(dá)的距離分辨率。
3.2.1 matlab代碼
fs = 100e6; %采樣率
T = 5e-6; %脈沖寬度
B = 10e6; %信號(hào)帶寬
K = B/T;%調(diào)頻斜率
N = round(T*fs);%采樣點(diǎn)數(shù)
t = linspace(0,T,N);
y = exp(1j*pi*K*t.^2);%LFM信號(hào)
theta = pi*K*t.^2; %信號(hào)相位
dtheta = pi*K*t; %相位變化量figure;
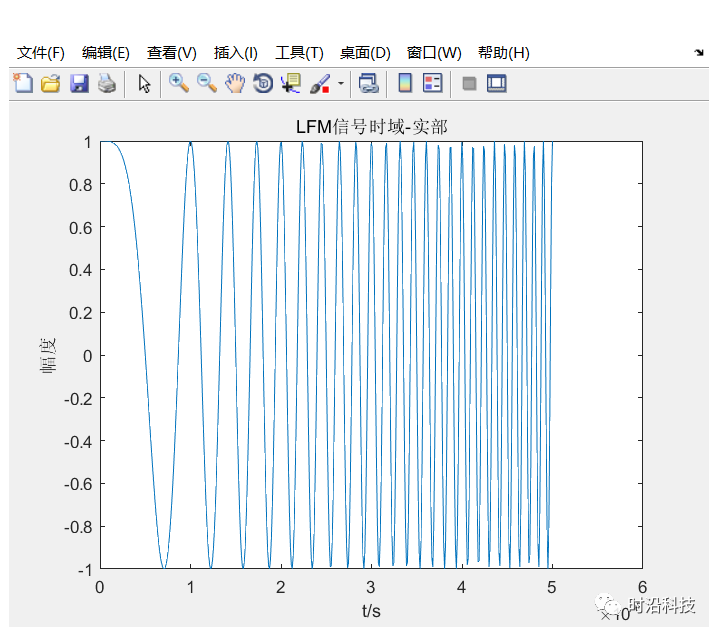
plot(t,real(y));
title(‘LFM信號(hào)時(shí)域-實(shí)部’);
xlabel(‘t/s’);
ylabel(‘幅度’);
figure;
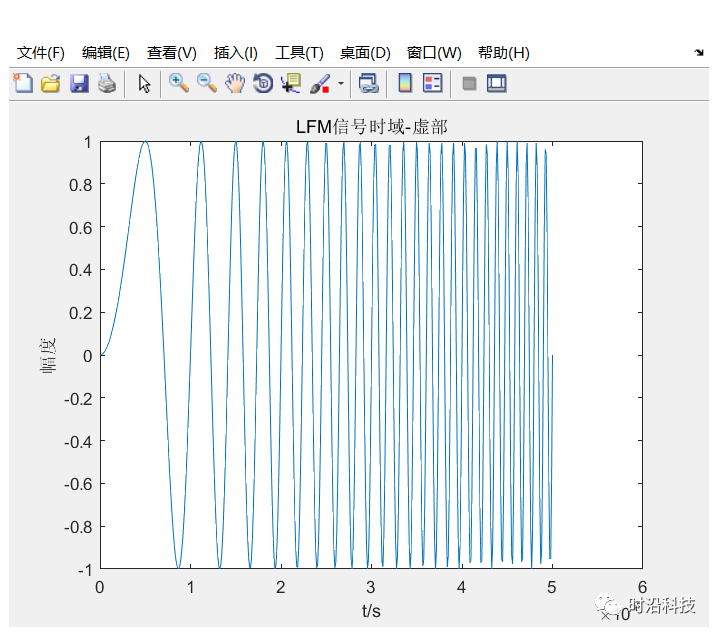
plot(t,imag(y));
title(‘LFM信號(hào)時(shí)域-虛部’);
xlabel(‘t/s’);
ylabel(‘幅度’);
figure;
plot(t,theta);
title(‘LFM信號(hào)相位’);
xlabel(‘t/s’);
ylabel(‘相位’);
figure;
plot(t,dtheta);
title(‘LFM相位變化率’);
xlabel(‘t/s’);
ylabel(‘相位變化率’);
3.2.2 仿真結(jié)果圖像
3.3 FPGA實(shí)現(xiàn)
3.3.1 參數(shù)計(jì)算
For example:
參數(shù)與上述matlab參數(shù)一致,采樣率fs:100MHz,脈沖寬度T:5us,信號(hào)帶寬B:10MHz,采樣點(diǎn)數(shù)N:500。Xlinx DDS IP設(shè)置如下,假定相位累加器設(shè)置為32位,輸出信號(hào)寬度設(shè)置為12位,可以根據(jù)自己的需求進(jìn)行設(shè)計(jì):
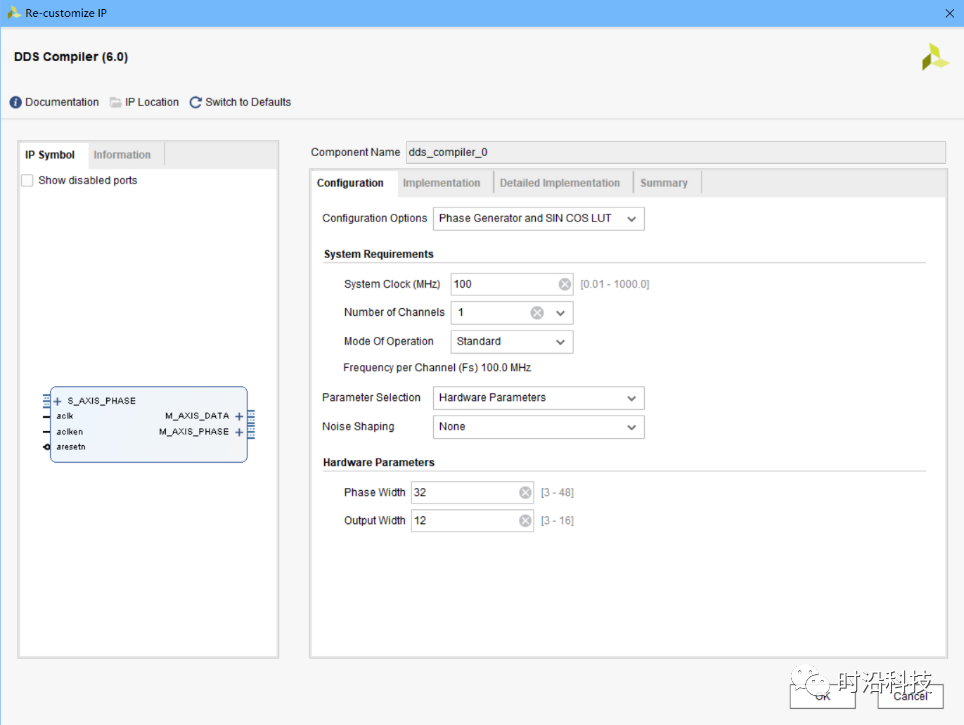
DDS IP配置界面1
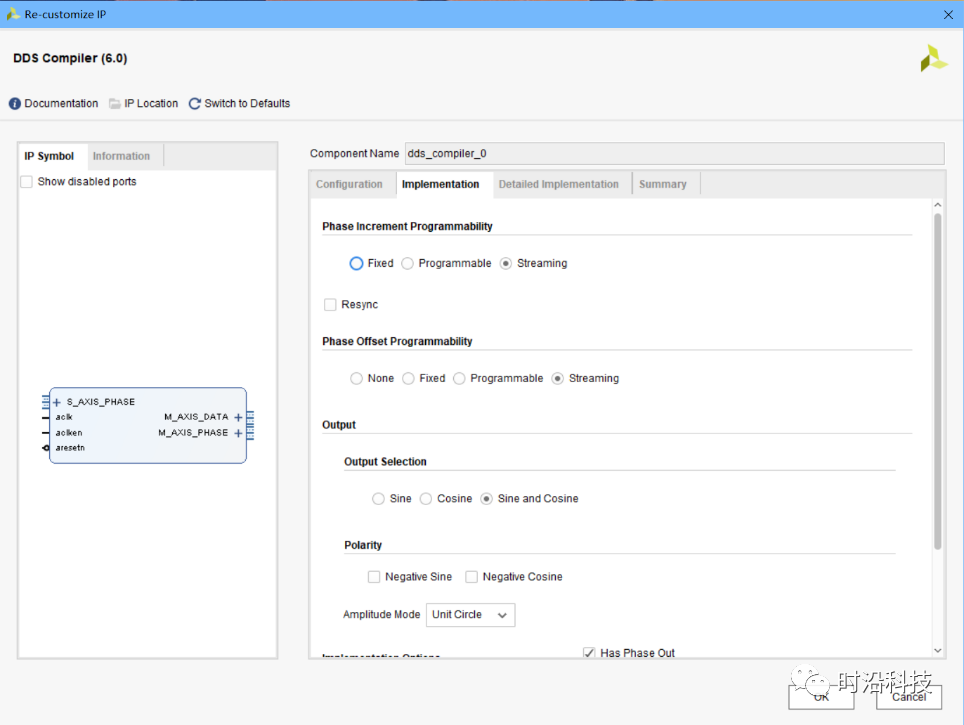
DDS IP配置界面2需要注意的是相位增量不是一個(gè)定值,而是隨時(shí)間呈線性變化的量。根據(jù)公式相位表達(dá)式φ(t)=πKt^2與相位變化率?φ(t)=2πKt,端口S_AXIS_PHASE的CHAN_0_POFF 與CHAN_0_PINC設(shè)置如下: 當(dāng)t = 0時(shí)φ(t) = πKt^2 = 0;?φ(t) = 2πKt = 0相位變化率?φ(t)每次增加的量為2πK?t:2πK?t = 2πBT/TNfs = 2πB/N由于DDS IP相位累加器位數(shù)Bθ(n)為32,且參數(shù)[0,2^32]對(duì)于相位弧度[0,1],那么相位增量?θ公式如下:?θ = 2πB/N*1/2π*2^Bθ(n)/fs = 858993.4592≈858993綜上,CHAN_0_POFF設(shè)置為0,CHAN_0_PINC從0開(kāi)始每次增加?θ。
3.3.2 仿真結(jié)果
部分代碼
//生成chirp信號(hào)
dds_compiler_0 suband_reference_waveform_inst (
.aclk (samp_clk),
.aclken (dds_aclken),
.aresetn (dds_aresetn),
.s_axis_phase_tvalid (s_axis_phase_tvalid),
.s_axis_phase_tdata (s_axis_phase_tdata),
.m_axis_data_tvalid (m_axis_data_tvalid),
.m_axis_data_tdata (m_axis_data_tdata),
.m_axis_phase_tvalid (m_axis_phase_tvalid),
.m_axis_phase_tdata (m_axis_phase_tdata)
);
wire signed [15:0] data_real = m_axis_data_tdata[15:0];
wire signed [15:0] data_imag = m_axis_data_tdata[31:16];
仿真波形
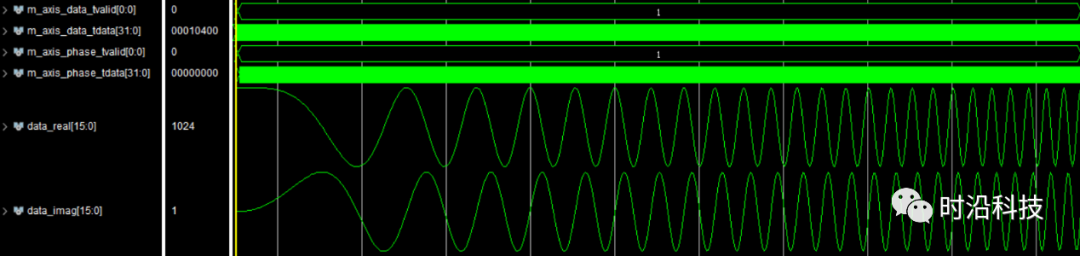
線性調(diào)頻信號(hào)FPGA仿真波形
文章出處:【微信公眾號(hào):FPGA之家】
責(zé)任編輯:gt
-
FPGA
+關(guān)注
關(guān)注
1630文章
21796瀏覽量
605977 -
轉(zhuǎn)換器
+關(guān)注
關(guān)注
27文章
8743瀏覽量
148031 -
DDS
+關(guān)注
關(guān)注
21文章
636瀏覽量
152931
原文標(biāo)題:利用DDS IP實(shí)現(xiàn)線性調(diào)頻信號(hào)(二)
文章出處:【微信號(hào):zhuyandz,微信公眾號(hào):FPGA之家】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
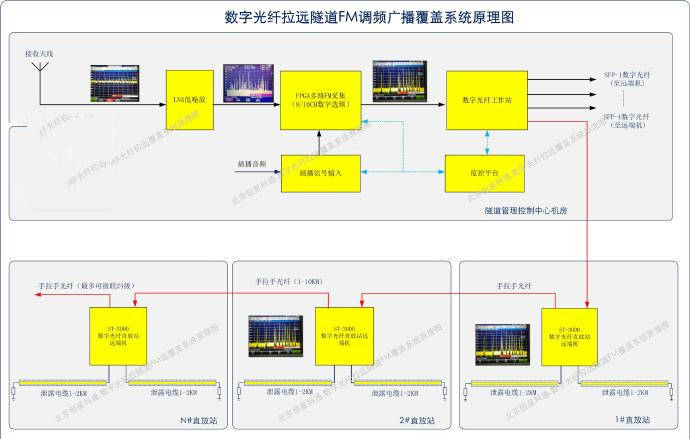
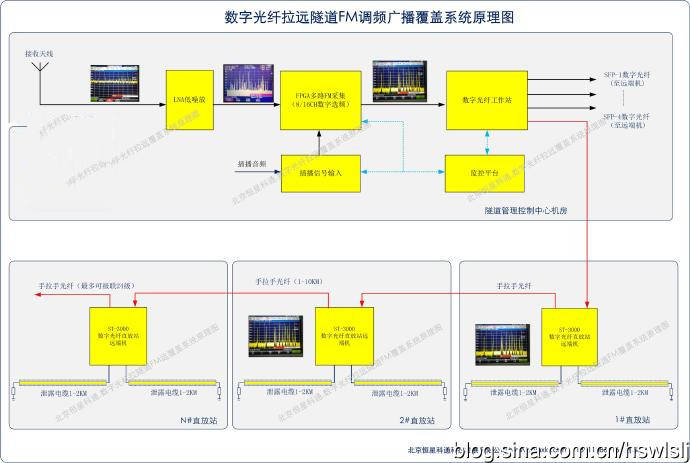
隧道FM廣播信號(hào)、隧道內(nèi)調(diào)頻廣播信號(hào)覆蓋方案選擇
調(diào)制在音頻信號(hào)處理中的應(yīng)用
隧道FM調(diào)頻廣播覆蓋方案
PWM與調(diào)頻的區(qū)別 基于PWM的電源管理方案
Xilinx DDS IP核的使用和參數(shù)配置
如何實(shí)現(xiàn)FPGA的IO輸出脈沖信號(hào)放大?
中科億海微SoM模組——中頻信號(hào)采集存儲(chǔ)卡

音頻信號(hào)通常包括哪些聲音信號(hào)
調(diào)頻收音機(jī)中頻信號(hào)頻率的選擇
調(diào)頻信號(hào)的分類和依據(jù)有哪些
低頻信號(hào)發(fā)生器如何調(diào)節(jié)電壓?

基于FPGA 的DDS正弦信號(hào)發(fā)生器的設(shè)計(jì)和實(shí)現(xiàn)
什么是調(diào)頻直放站,調(diào)頻直放站的功能和作用是什么

紅外耳機(jī)和調(diào)頻耳機(jī)一樣嗎 紅外耳機(jī)和調(diào)頻耳機(jī)的區(qū)別
調(diào)頻發(fā)射機(jī)電路圖分享






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論