") 雙目標(biāo)定是什么?為什么要進(jìn)行雙目標(biāo)定?
雙目標(biāo)定是什么?為什么要進(jìn)行雙目標(biāo)定?
1 前言
雙目相機(jī)標(biāo)定,從廣義上講,其實(shí)它包含兩個(gè)部分內(nèi)容:
兩臺(tái)相機(jī)各自誤差的標(biāo)定(單目標(biāo)定)
兩臺(tái)相機(jī)之間相互位置的標(biāo)定(狹義,雙目標(biāo)定)
在這里我們所說的雙目標(biāo)定是狹義的,講解理論的時(shí)候僅指兩臺(tái)相機(jī)之間相互位置的標(biāo)定,在代碼實(shí)踐的時(shí)候,我們才說完整的雙目標(biāo)定。 首先來思考一個(gè)問題:為什么要進(jìn)行雙目標(biāo)定?
這是因?yàn)樵谠S多三維重建算法中,我們都要知道兩臺(tái)相機(jī)之間的相對(duì)位置關(guān)系,這樣才能進(jìn)行距離計(jì)算。
基線:兩個(gè)光心的連線稱為基線;
極平面:物點(diǎn)(空間點(diǎn)M)與兩個(gè)光心的連線構(gòu)成的平面稱為極平面;
極線:極平面與成像平面的交線
極點(diǎn):極線的一端,基線與像平面的交點(diǎn)
像點(diǎn):極線的一端,光心與物點(diǎn)連線與像平面的交點(diǎn);
可以看出:
校正前,相機(jī)的光心不是相互平行的
校正后,極點(diǎn)在無窮遠(yuǎn)處,兩個(gè)相機(jī)的光軸平行,像點(diǎn)在左右圖像上的高度一致
標(biāo)定+校正后圖片: 圖1 立體校正后左右相機(jī)圖像發(fā)生一定扭曲這樣的好處是:比如后續(xù)的立體匹配時(shí),只需在同一行上搜索左右像平面的匹配點(diǎn)即可,能使效率大大提高。
注:可以看出來,最重要的,我們要知道右相機(jī)相對(duì)于左相機(jī)的位姿關(guān)系,那我們才可以做校正!
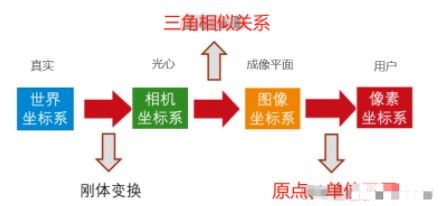
2 單目理論回顧
先來回顧下單目標(biāo)定理論,理想的單目相機(jī)模型可以簡(jiǎn)化為:
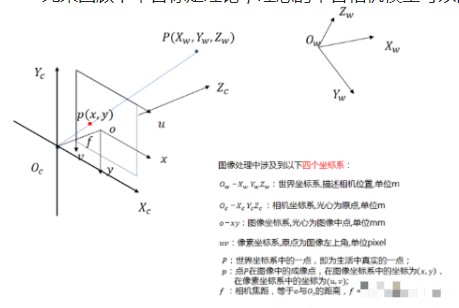
而四大坐標(biāo)系,包括世界坐標(biāo)系、相機(jī)坐標(biāo)系、圖像坐標(biāo)系、像素坐標(biāo)系,它們之間的轉(zhuǎn)換關(guān)系如下:
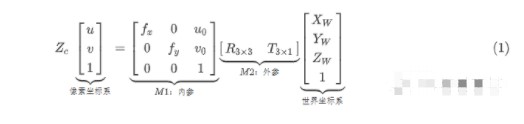
最終,從理想的相機(jī)模型,從世界坐標(biāo)系到像素坐標(biāo)系的轉(zhuǎn)換關(guān)系:
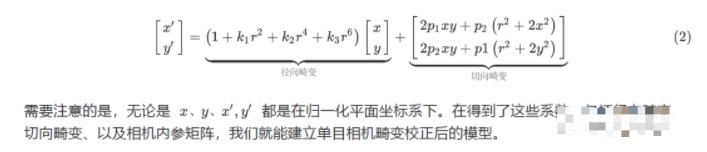
但由于制造原因,使得成像過程(從相機(jī)坐標(biāo)系到圖像坐標(biāo)系轉(zhuǎn)換過程中)存在著畸變,主要有兩類,徑向畸變和切向畸變,它們可以通過以下公式進(jìn)行修正:
3 雙目標(biāo)定公式推導(dǎo)
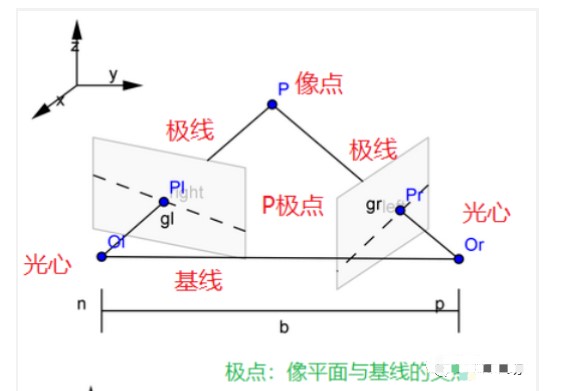
圖3 標(biāo)定模型 [2] 記:
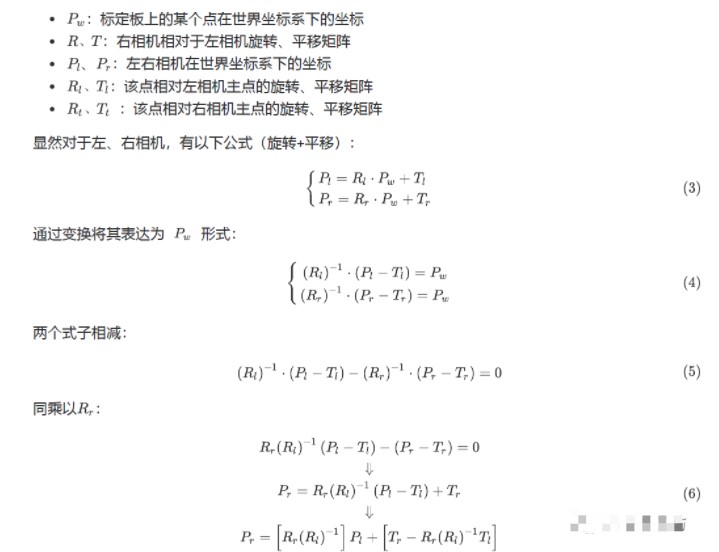
另外,右相機(jī)主點(diǎn)相對(duì)于左相機(jī)主點(diǎn),顯然還有: 
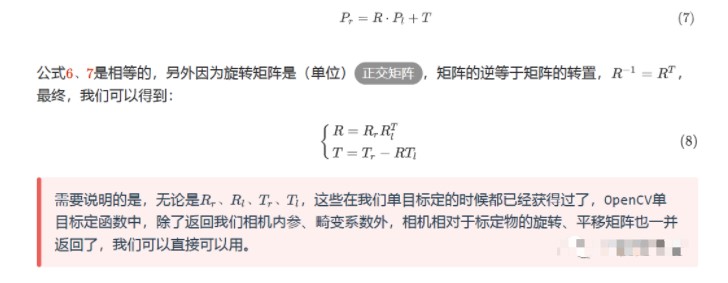
代入上式,因?yàn)榕臄z了多張圖片,利用最小二乘法,也可以是奇異值分解(數(shù)學(xué)的部分比較復(fù)雜,在這里忽略),總而言之,最小化誤差,即可得到我們最佳估計(jì)的 矩陣,有了這兩個(gè)矩陣,我們做個(gè)旋轉(zhuǎn)、平移就可以了。 注:雖然得到了旋轉(zhuǎn)、平移矩陣,也但是極線校正的方法有很多,這個(gè)我們之后講。
4 極線校正理論推導(dǎo)
雙目標(biāo)定后,我們得到了右相機(jī)相對(duì)于左相機(jī)的位姿關(guān)系,也就是R、T矩陣,下面一步即做極線校正。校正好處是之后做立體匹配搜索的時(shí)候,只需要在同高度附近進(jìn)行搜索,大幅提升效率。根據(jù)前文的推導(dǎo),在獲取了R、T矩陣后,我們就要進(jìn)行極線校正(立體校正),使兩部相機(jī)光軸平行,如下所示:
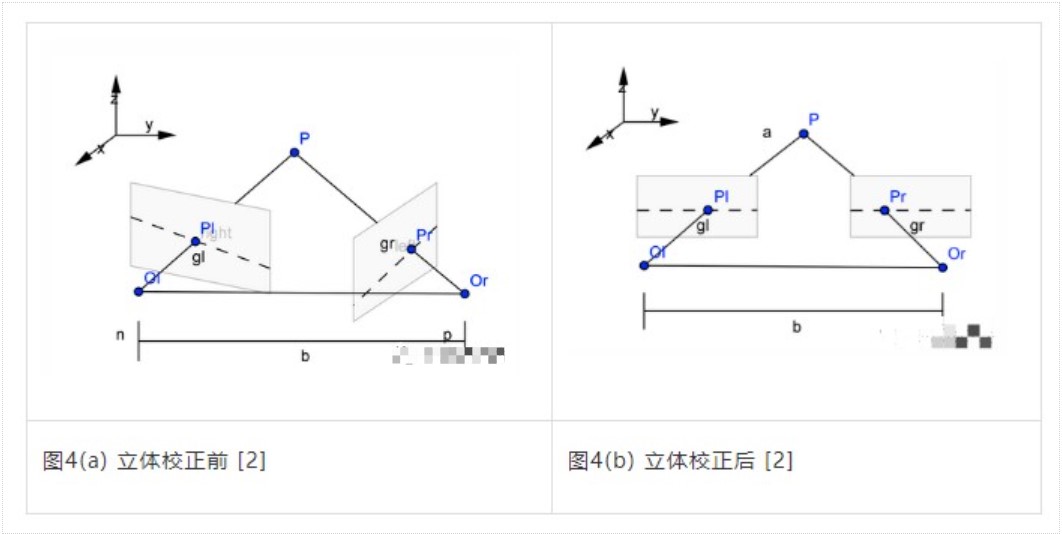
圖4(a) 立體校正前 [2]圖4(b) 立體校正后 [2]
但是平行的方法有很多,可以:
左相機(jī)不動(dòng),右相機(jī)動(dòng)。
也可以兩部相機(jī)旋轉(zhuǎn)到中間等等。
最常見的校正方法就是Bouguet極線校正方法。
Bouguet極線校正方法:左右相機(jī)成像平面各旋轉(zhuǎn)一半,使得左右圖像重投影造成的誤差最小,左右視圖的共同面積最大。
具體步驟(這塊理論推導(dǎo)可以去看論文,這里只給出結(jié)論,看不懂沒關(guān)系,不妨礙我們使用它):
得到這兩個(gè)變換矩陣,左、右相機(jī)分別乘以這兩個(gè)矩陣即可完成變換,其中已經(jīng)包含了平移信息!
再計(jì)算重投影矩陣,其實(shí)現(xiàn)了像素坐標(biāo)系(左相機(jī))到世界坐標(biāo)系之間的轉(zhuǎn)換:
校正后,可以根據(jù)需要對(duì)圖像進(jìn)行裁剪,需重新選擇一個(gè)圖像中心,和圖像邊緣從而讓左、右疊加部分最大。
責(zé)任編輯:lq6
-
三維
+關(guān)注
關(guān)注
1文章
512瀏覽量
29041 -
雙目標(biāo)定
+關(guān)注
關(guān)注
0文章
2瀏覽量
1319
原文標(biāo)題:一文詳解雙目相機(jī)標(biāo)定理論
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
請(qǐng)問做反射式血氧飽和度測(cè)量時(shí)如何進(jìn)行標(biāo)定呢?
傳感器靜態(tài)標(biāo)定的主要步驟是什么
使用基于模型的標(biāo)定提高開發(fā)效率
使用ina219測(cè)電流時(shí),要進(jìn)行標(biāo)定嗎?
基于CW32的儀表精度測(cè)量實(shí)現(xiàn)(三):標(biāo)定與校準(zhǔn)
康謀技術(shù) | 自動(dòng)駕駛傳感器標(biāo)定技術(shù):從單一到聯(lián)合標(biāo)定

助力風(fēng)電行業(yè)!深視智能SR7400線激光以機(jī)器人手眼標(biāo)定實(shí)現(xiàn)風(fēng)力葉片切割引導(dǎo)

基于 FPGA 的目標(biāo)跟蹤電磁炮系統(tǒng)
溫壓補(bǔ)償,提高氣體流量計(jì)標(biāo)定精度的關(guān)鍵!

CW32數(shù)字電壓電流表軟件進(jìn)階教程-3.電壓電流標(biāo)定
STM32是否支持CCP協(xié)議,能否用INCA/CANaple通過CAN總線的CCP協(xié)議進(jìn)行標(biāo)定?
奧比中光正式發(fā)布全新Gemini 330系列雙目3D相機(jī)

以色列人工智能目標(biāo)定位系統(tǒng)實(shí)力如何
工業(yè)相機(jī)單目和雙目的區(qū)別

TSMaster如何同時(shí)記錄標(biāo)定變量和DBC信號(hào)至BLF文件






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論