 異步FIFO用格雷碼的原因有哪些
異步FIFO用格雷碼的原因有哪些
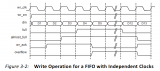
異步FIFO通過比較讀寫地址進行滿空判斷,但是讀寫地址屬于不同的時鐘域,所以在比較之前需要先將讀寫地址進行同步處理,將寫地址同步到讀時鐘域再和讀地址比較進行FIFO空狀態判斷(同步后的寫地址一定是小于或者等于當前的寫地址,所以此時判斷FIFO為空不一定是真空,這樣更保守)。
將讀地址同步到寫時鐘域再和寫地址比較進行FIFO滿狀態判斷(同步后的讀地址一定是小于或者等于當前的讀地址,所以此時判斷FIFO為滿不一定是真空,這樣更保守),這樣可以保證FIFO的特性:FIFO空之后不能繼續讀取,FIFO滿之后不能繼續寫入。
大多數情形下,異步FIFO兩端的時鐘不是同頻的,或者讀快寫慢,或者讀慢寫快,這時候進行地址同步的時候,可能會有地址遺漏,以讀慢寫快為例,進行滿標志判斷的時候需要將讀地址同步到寫時鐘域,因為讀慢寫快,所以不會有讀地址遺漏,同步后的讀地址滯后當前讀地址,所以可能滿標志會提前產生。
進行空標志判斷的時候需要將寫地址同步到讀地址,因為讀慢寫快,所以當讀時鐘同步寫地址的時候,必然會漏掉一部分寫地址(寫時鐘快,寫地址隨寫時鐘翻轉,直到滿標志出現為止),那到底讀時鐘會同步到哪個寫地址?
不必在意是哪一個,我們關注的是漏掉的地址會不會對FIFO的空標志產生影響。比如寫地址從0寫到10,期間讀時鐘域只同步到了2,5,7這三個寫地址,漏掉了其他地址。同步到7地址時,真實的寫地址可能已經寫到10地址,相當于“在讀時鐘域還沒來得及覺察的情況下,寫時鐘域可能偷偷寫了數據到FIFO去”,這樣在比較讀寫地址的時候不會產生FIFO“空”讀操作。漏掉的地址也沒有對FIFO的邏輯操作產生影響。
我們可以對異步FIFO的地址采用binary編碼,這樣并不影響異步FIFO的功能,前提是讀寫地址同步時能夠保持正確。這種情況在功能仿真時完全正確,問題只有到時序仿真時才會遇到。毛刺可以說是異步電路的殺手,一個毛刺被觸發器采樣后會被放大,然后傳播,導致電路功能出錯。
binary編碼的地址總線在跳變時極易產生毛刺,因為binary編碼是多位跳變,在實現電路時不可能做到所有的地址總線等長,address bus skew必然存在,而且寫地址和讀地址分屬不同時鐘域,讀寫時鐘完全異步,這樣地址總線在進行同步過程中出錯不可避免,比如寫地址在從0111到1000轉換時4條地址線同時跳變,這樣讀時鐘在進行寫地址同步后得到的寫地址可能是0000-1111的某個值,這個完全不能確定,所以用這個同步后的寫地址進行FIFO空判斷的時候難免出錯。
這個時候gray碼體現了價值,一次只有一位數據發生變化,這樣在進行地址同步的時候,只有兩種情況:1.地址同步正確;2.地址同步出錯,但是只有1位出錯;
第一種正確的情況不需要分析,我們關注第二種,假設寫地址從000-》001,讀時鐘域同步出錯,寫地址為000-》000,也就是地址沒有跳變,但是用這個錯誤的寫地址去做空判斷不會出錯,最多是讓空標志在FIFO不是真正空的時候產生,而不會出現空讀的情形。
所以gray碼保證的是同步后的讀寫地址即使在出錯的情形下依然能夠保證FIFO功能的正確性,當然同步后的讀寫地址出錯總是存在的(因為時鐘異步,采樣點不確定)。
這里需要注意gray碼只是在相鄰兩次跳變之間才會出現只有1位數據不一致的情形,超過兩個周期則不一定,所有地址總線bus skew一定不能超過一個周期,否則可能出現gray碼多位數據跳變的情況,這個時候gray碼就失去了作用,因為這時候同步后的地址已經不能保證只有1位跳變了。
另外需要將地址總線打兩拍,這是為了避免亞穩態傳播,理論上將打兩拍不能消除亞穩態現象,因為時鐘異步,亞穩態不可避免,但是可以極大降低亞穩態傳播的概率,低頻情況下甚至STA不需要分析這里的異步時序,因為寄存器都可以在一拍內將亞穩態消除,恢復到正常0/1態。而在高頻情況下則不一定,尤其在28nm工藝以下,需要檢查兩級觸發器的延遲,保證延遲低,這樣可以提高Tr,提高系統MTBF。
編輯:jq
-
異步FIFO
+關注
關注
0文章
20瀏覽量
8409
原文標題:異步FIFO為什么用格雷碼
文章出處:【微信號:gh_9d70b445f494,微信公眾號:FPGA設計論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
FIFO Generator的Xilinx官方手冊
什么是工業用掃碼設備,工業掃碼器有什么優勢

總線異步通信有幾種聯絡類型

異步永磁電機無法達到同步轉速的原因
同步FIFO和異步FIFO區別介紹
DMA產生FIFO error interrupt錯誤的原因?
關于同步FIFO和異步FIFO的基礎知識總結
FIFO漫談之異步FIFO空滿信號的產生位置

?車用傳感器頻繁損壞的原因及解決方案


cy7c68013a slave fifo寫數據出現異常的原因有哪些?如何解決?
車用傳感器頻繁損壞的原因及解決方案





 工商網監
工商網監
評論