") 一文帶你看懂3D視覺
一文帶你看懂3D視覺
從手機解鎖、支付消費到工廠的生產應用,3D 視覺已經深入到生活的方方面面。那到底什么是3D 視覺。它在仙工智能視覺 AI 解決方案中又扮演著什么角色?
今天零化身科普小達人一文帶你看懂 3D 視覺!
3D視覺與2D視覺的技術差異
3D 視覺與 2D視覺技術的最大區(qū)別在于處理的數(shù)據(jù)類型不同。在 3D 視覺領域,被處理的對象通常是依靠 3D 傳感器采集到的三維點云數(shù)據(jù),而 2D 視覺技術主要被用于處理平面圖像里的信息。這決定了 3D 視覺不僅能夠感知場景中物體的有無,還能夠準確的感知到物體離我們距離遠近、尺寸大小和位置朝向。
搭配上 RoboView Server 算法平臺,AMR 就可以擁有像人眼一樣能夠真實感知物體的三維尺寸信息的視覺,更好地實現(xiàn)2D視覺無法實現(xiàn)或者不好實現(xiàn)的功能。
02
RoboView 如何
通過 3D 視覺實現(xiàn)這些功能
雖然 3D 成像技術在不斷發(fā)展,但目前依然沒有具備抗環(huán)境光干擾能力強、成像距離遠、測距精度高、分辨高和成本低等優(yōu)點于一身的 3D 傳感器。
因此,目前 3D 視覺的應用還是依據(jù)具體的使用場景和預算來選擇相機,然后根據(jù)相機成像結果來定制性的進行算法開發(fā)。這種成本高、周期久的應用模式嚴重限制了 3D 視覺在實際場景中的使用。
本著以標準化產品支撐非標應用的思維,RoboView 的3D 視覺模塊對過往3D視覺非標項目進行總結性分析,六大基本操作流程,就像生產線上的六道基本工序一樣對 3D 視覺數(shù)據(jù)進行分解、處理和分析,最終得到我們想要的信息。
01
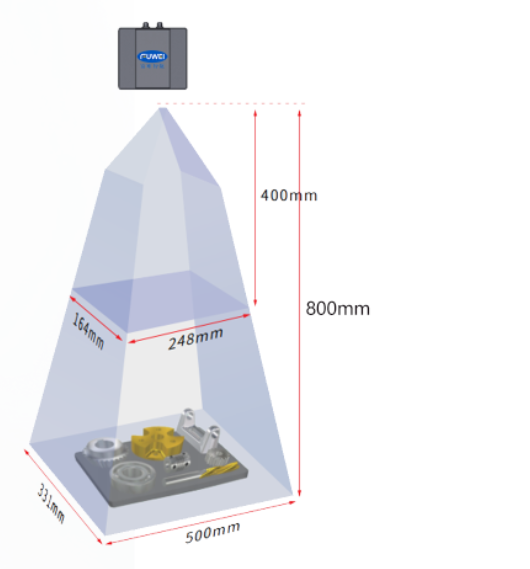
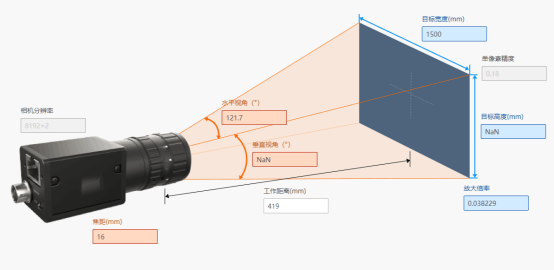
第一步-數(shù)據(jù)采集
3D 數(shù)據(jù)采集流程主要工作是獲取場景的 3D 信息,該流程對外面對的是不同品牌和型號的 3D 傳感器接口,對內是輸出同一格式的 3D 視覺數(shù)據(jù)。實現(xiàn)了對外整合和對內的統(tǒng)一。
02
第二步-數(shù)據(jù)標定
數(shù)據(jù)標定主要工作是建立3D 傳感器與真實場景之間的聯(lián)系,將3D傳感器看到的事物與真實場景中存在的事物建立一一對應關系。完成數(shù)據(jù)標定過程,我們就可以將3D視覺數(shù)據(jù)分析出來的結果反饋到到真實場景中。
03
第三步-數(shù)據(jù)濾波
數(shù)據(jù)濾波過程相當于對采集到的3D信息進行一次初略的清洗,去除與后續(xù)分析對象無關的信息,可以方便我們更加聚焦在需要處理的對象上。
04
第四步-場景分割
場景分割是對3D數(shù)據(jù)進行降維處理,將濾波后的3D視覺數(shù)據(jù)根據(jù)其結構特征及紋理差異分割成平面、連續(xù)曲面等一系列簡單結構的3D視覺數(shù)據(jù)。通過將場景內的3D視覺數(shù)據(jù)分割成一塊塊簡單結構特征,可以有效的避免兩個不同對象干擾后期的目標識別結果。
05
第五步-目標識別
目標識別就是確定目標物體在場景中的位置和姿態(tài),利用目標識別算法準確的識別場景中的貨物所在位置為后續(xù)數(shù)據(jù)評估提供基礎。識別出貨物的位置與姿態(tài)也可以用來引導機器人對貨物進行叉取轉運。
06
第六步-數(shù)據(jù)評估
準確識別出場景中的貨物后,數(shù)據(jù)評估流程就可以評估貨物的長、寬、高等尺寸信息,進而分析出貨物堆疊層高、貨物類型等深層次信息。
03
RoboView 3D 視覺提供功能
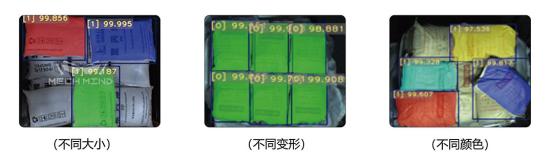
1、障礙物檢測
3D 視覺下,無懼陰影和視線遮擋等,有效減少誤警問題,大幅提升應急通道障礙物檢測功能的準確性。
2、庫位管理
帶有 3D 視覺的庫位管理,不僅可以準確管理庫位內貨物有無信息,更高級的貨物尺寸信息、堆疊層高和貨物擺放位姿等信息。這些深層次的信息為后續(xù)的高層級應用如目標檢測,AGV 調度等深層次的庫位管理功能提供了可能。
除此之外,仙工智能視覺 AI 解決方案-RoboView 為客戶提供覆蓋生產、安全、管理等環(huán)節(jié)下眾多應用的視覺 AI 解決方案。解決方案涵蓋前期調研、中期研發(fā)、落地和后期的產品維護和升級,助力客戶提高生產效率,加速完成智能化生產。
責任編輯:haq
-
機器視覺
+關注
關注
162文章
4405瀏覽量
120730 -
AI
+關注
關注
87文章
31513瀏覽量
270326 -
3D視覺
+關注
關注
4文章
435瀏覽量
27624
原文標題:超級干貨!RoboView 技術篇之 3D 視覺
文章出處:【微信號:GermanyBosch,微信公眾號:德國博世】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
適用于3D機器視覺的高度可擴展的TI DLP技術

居然還有這樣的10.1寸光場裸眼3D視覺訓練平板電腦?

裸眼3D筆記本電腦——先進的光場裸眼3D技術
3D視覺引導的多SKU紙箱拆解
蘇州吳中區(qū)多色PCB板元器件3D視覺檢測技術

英倫科技裸眼3D平板電腦:革新視覺體驗,重塑價格優(yōu)勢
英倫科技10.1寸裸眼3D平板電腦——革新您的視覺體驗
除了令人驚嘆的裸眼3D顯示技術,英倫科技裸眼3D視覺訓練一體機還具備哪些特點?
3D視覺引導方案解決工廠產線上下料難題
銀牛微電子:集3D視覺感知、AI及SLAM為一體的3D空間計算芯

奧比中光攜多款3D相機深度參與國內3D視覺最高規(guī)格會議

解決方案|基于3D視覺技術的鋁合金板件刷油烘干自動化上下料
3C薄片自動化上料,3D視覺技術如何賦能?

Cognex發(fā)布了In-Sight? L38 3D視覺系統(tǒng),為3D檢測設立新標準
工業(yè)自動化,3D視覺在五金件上下料中的應用






 工商網監(jiān)
工商網監(jiān)
評論