") 無位置傳感器的電機控制方案與硬件設(shè)計
無位置傳感器的電機控制方案與硬件設(shè)計
一、前言。
電機控制一般使用閉環(huán)控制,這就必須使用傳感器,如:霍爾傳感器、編碼盤等。
但是有的應(yīng)用場合下,難以安裝霍爾傳感器、編碼盤,或者就算是安裝好,也很容易損壞。
霍爾傳感器、編碼盤都屬于位置傳感器。
那么,無位置傳感器,是否也能控制電機?
答案是可以的。
二、方案。
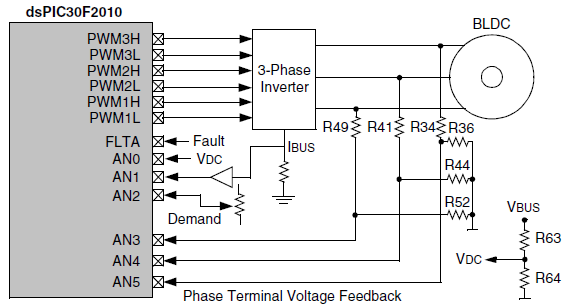
方案如下圖所示。其中,3Phase Inverter由6個MOS管和MOS管驅(qū)動組成。
VBUS測量電機的母線電壓,假設(shè)電機由直流50V供電,則測量直流50V;由交流220V供電,則測量直流310V。
IBUS測量電機總電流,可用于防過流、電流環(huán)控制。
Demand是給定的轉(zhuǎn)速,用滑動電位器模擬轉(zhuǎn)速的輸入。
AN3、AN4、AN5引腳,用于測量電機的三相電壓。
這樣一來,沒有了位置傳感器,大大簡化了設(shè)備的安裝步驟。但是,會產(chǎn)生另外的一些問題。
電機如何啟動?如何換相?如何調(diào)速?
三、硬件。
上邊和下邊MOS管均使用N溝道的6N60,可以耐600V高壓。
MOS管驅(qū)動使用L6388ED,其內(nèi)部邏輯可以防止高邊和低邊MOS管同時導通。有自舉電容讓高邊MOS導通。
在單片機初始化時,要給L6388ED的自舉電容充電一段時間,否則高邊MOS管可能不導通,或者不完全導通。
L6388ED內(nèi)部框圖如圖所示。LIN=1,HIN=0,則LVG導通,HVG不導通,Cboot充電。
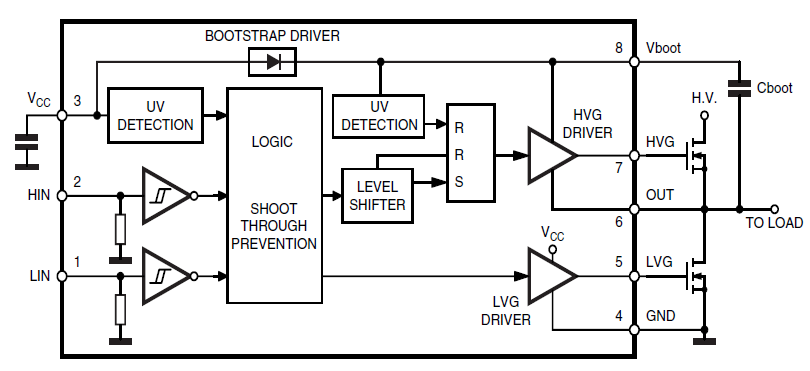
L6388ED自舉電容的容值可以由手冊上的公式計算得出,我這里控制低速電機,用的是10uF。
一旦自舉電容充完電手,MOS管可以在一段時間內(nèi)不需要充電,一般是電機每次啟動時充電。
建議使用15V給L6388ED供電,使用12V的話,可能讓MOS不導通或不完全導通,如下圖所示。
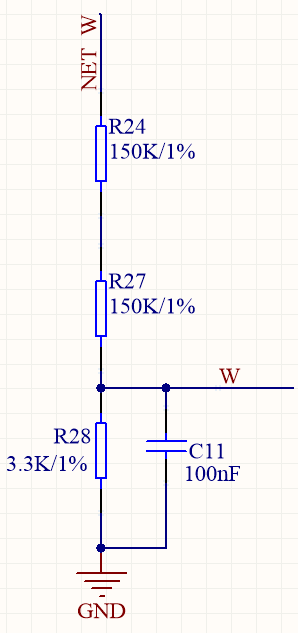
測量三相電壓,如下圖所示,NET_W是W相的電壓,而W可以直接接單片機的ADC,C11為100nF電容,該電容可以平滑相電壓,不能去掉,否則無法檢測反電動勢。U相和V相與此類似,這里不再贅述。
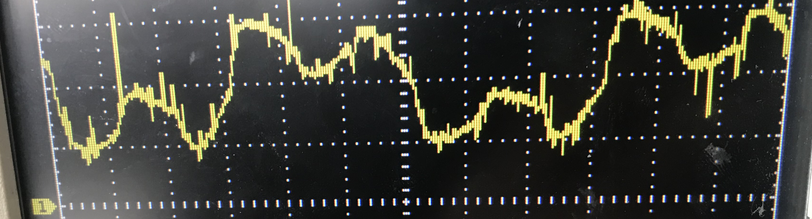
平滑之后的波形,呈馬鞍型,如下圖所示。
四、單片機算法。
該方案硬件是簡單了,但是算法復雜。
該算法分三個部分,對齊轉(zhuǎn)子、開環(huán)強制換相、利用反電動勢閉環(huán)換相。
4.1 對齊轉(zhuǎn)子。
先給自舉電容充電,然后強制給某一相PWM,讓轉(zhuǎn)子對齊在一個固定的扇區(qū)。
這種方法在絕大多數(shù)的情況下都能對齊,若不能對齊,會啟動失敗,此時,重新啟動即可。
對齊轉(zhuǎn)子的時間不宜過長,針對本文的低速電機,對齊時間約200ms。
4.2 開環(huán)強制換相。
這里的開環(huán)是指未檢測到反電動勢,強制輸出PWM,并且在預(yù)算好的時間換相,從而讓電機轉(zhuǎn)起來。
換相的方法,不同的電機可能不一樣(如:極數(shù)不同),這里使用六步換相,如下圖所示。
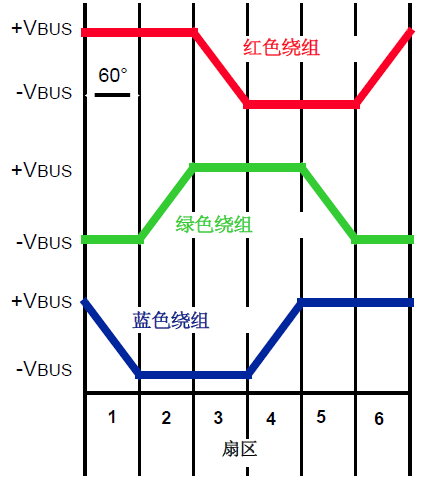
其中,+VBUS表示上橋臂給PWM,-VBUS表示下橋臂給高電平導通,斜線表示上、下橋臂均不導通。
上、下橋臂均不導通時,電機會產(chǎn)生反電動勢。
4.3 利用反電動勢閉環(huán)換相。
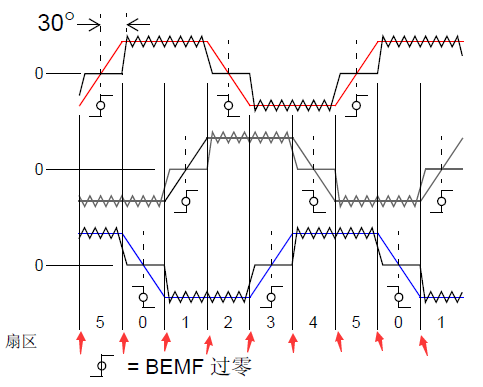
理想情況下,上、下橋臂均不導通時,在電機某一相電壓檢測到反電動勢過零,但是過零時刻和實際要換相的時刻,相差30度角。所以,在檢測到反電動勢過零之后,要延時30度,再換相。
實際情況下,延時的30度還要根據(jù)單片機內(nèi)部的ADC采樣,濾波算法進行補償,這里的補償?shù)慕嵌纫话闶浅暗摹?/p>
假設(shè)超前x度,那么實際換相時刻為(30-x)度。
BEMF就是反電動勢,紅色箭頭指向的是換相時刻,如下圖所示。
但是,ADC采樣的電壓都是正電壓,沒有負,那就需要構(gòu)造一個虛擬中性點。
把三相電壓加起來取平均值,就是虛擬中性點。如下圖所示。
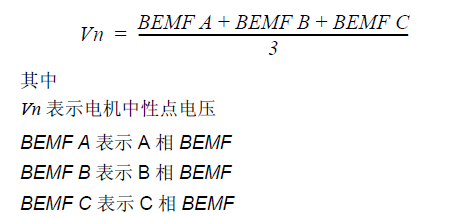
把虛擬中性點當作是零點,這樣就能做到過零檢測。
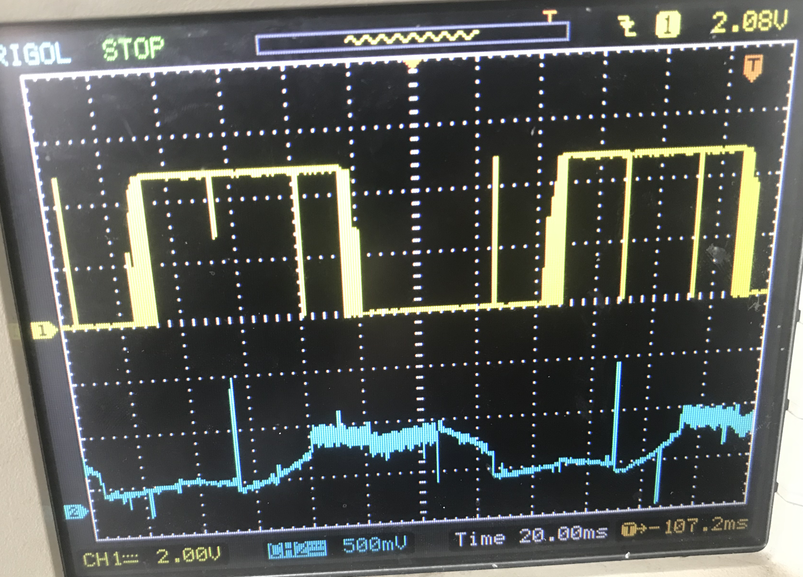
虛擬中性點并不是一個恒定值,它的波形如下圖所示,類似正弦波。

檢測反電動勢過零,有兩種方法,一種是比較器,另一種是ADC采樣后濾波。
用比較器的方法,優(yōu)點是減少單片機的運算量,缺點是增加硬件成本。
用ADC采樣的方法,優(yōu)點是減少硬件成本,缺點是增加單片機的運算量。
由于這里需要用到的ADC采樣率要求不高(20KHz SPS),所以用單片機內(nèi)部集成的ADC即可。
這里采用ADC采樣的方法。其濾波算法稱為擇多算法,在另一篇博文再詳細介紹。
五、注意事項。
1、ADC要在PWM高電平的中部采樣,可以避免毛刺的干擾。
2、六步換相的步調(diào)必須正確,否則無法檢測反電動勢。
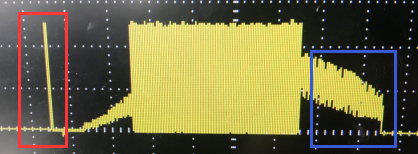
六步換相有問題,可能不出現(xiàn)紅圈中的豎線,也可能不出現(xiàn)藍圈中的反電動勢。
反電動勢有問題,電機無法加速。
3、可以使用互補的PWM,也可以使用上橋臂為PWM,下橋臂為高低電平。
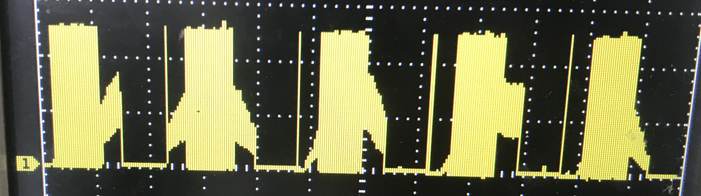
4、換相的波形如下圖所示。
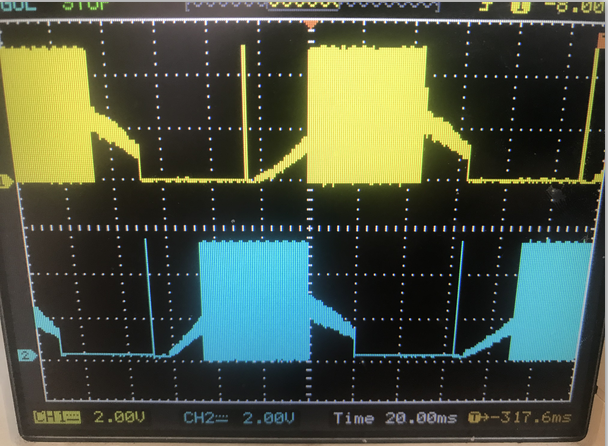
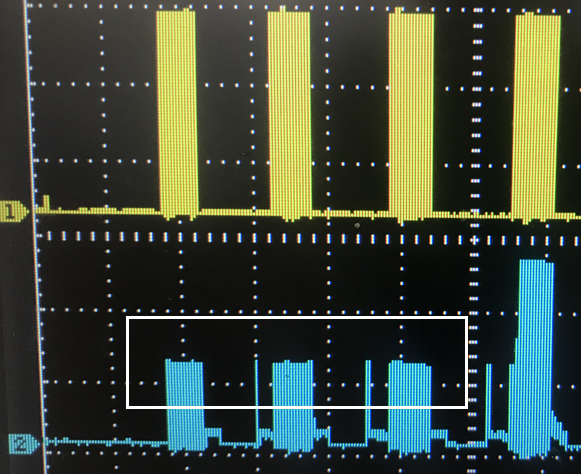
5、黃色為經(jīng)過比較器后的波形(非本文使用的方法),藍色為經(jīng)過電阻分壓和電容濾波后的波形。如下圖所示。
經(jīng)過比較器后的波形會產(chǎn)生三條豎線,這三條豎線是由于換相引起的,所以在換相時,不判斷過零。
在不換相時,去抖,判斷邊沿翻轉(zhuǎn)即是過零點,此方法比ADC濾波要簡單一些。
6、換相時刻不正確的波形,如下圖所示。
六、參考文獻
《使用反電動勢濾波進行無傳感器BLDC控制》
《用擇多函數(shù)實現(xiàn)反電動勢濾波的無傳感器BLDC控制》
《AN1160》——MicroChip官方手冊及源代碼
dsPICDEM MCLV-2開發(fā)板資料——含硬件原理圖
L6388ED數(shù)據(jù)手冊
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756566 -
MOS管
+關(guān)注
關(guān)注
108文章
2439瀏覽量
67563 -
電機
+關(guān)注
關(guān)注
142文章
9081瀏覽量
146366
發(fā)布評論請先 登錄
相關(guān)推薦
使用旋轉(zhuǎn)電感式位置傳感器的三相BLDC電機的磁場定向控制(FOC)



基于滑模觀測器和鎖相環(huán)的無軸承感應(yīng)電機無速度傳感器控制
基于TMS320C25 DSP的梯形無刷DC電機無傳感器控制
如何使用無代碼無傳感器BLDC電機驅(qū)動器降低電機噪聲
電機控制器硬件的功能介紹
Renesas永磁同步電機無位置傳感器算法介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論