") 低速自動駕駛的應(yīng)用場景和發(fā)展
低速自動駕駛的應(yīng)用場景和發(fā)展
自動駕駛技術(shù)的發(fā)展并不如我們所預(yù)想的那么順利,無論是自動駕駛的發(fā)展模式(單車智能or智能網(wǎng)聯(lián)),還是自動駕駛的技術(shù)升級(激光雷達(dá)、毫米波雷達(dá)、深度學(xué)習(xí)等),亦或是自動駕駛的相關(guān)法律法規(guī)制定,都沒有形成一個完善的且可以足夠商用化應(yīng)用的體系,消費(fèi)者想要在日常生活中享受到自動駕駛服務(wù)的日子還有很長一段路要走。但隨著自動駕駛技術(shù)的提升,很多自動駕駛概念已經(jīng)被使用且和我們?nèi)粘I钕⑾⑾嚓P(guān)的產(chǎn)品都看到了自動駕駛的影子,并服務(wù)于我們?nèi)粘5纳町?dāng)中,這就是低速自動駕駛。
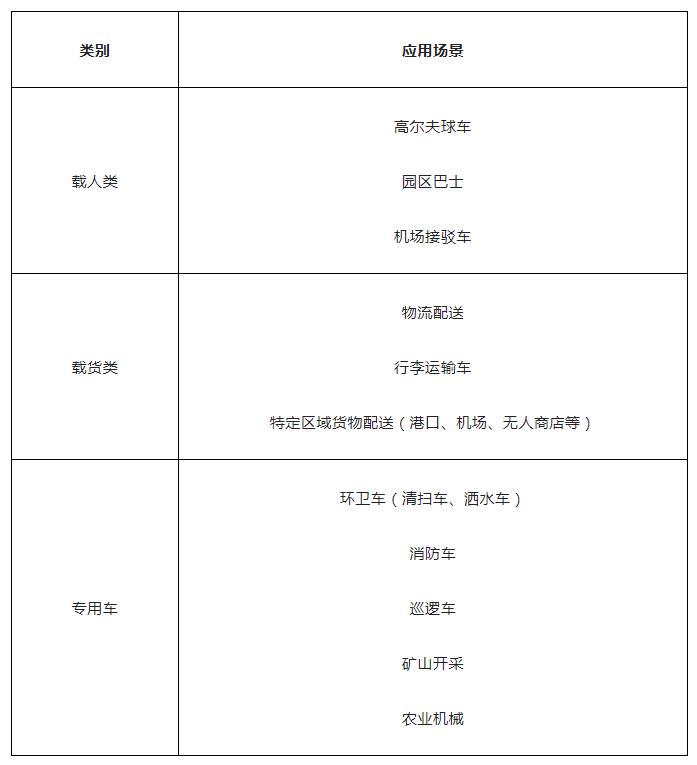
低速自動駕駛就是指應(yīng)用場景相對簡單固定,時速低于50 km/h的自動駕駛汽車,低速自動駕駛也被稱之為低速無人駕駛,在很多園區(qū)、校園看到的自動快遞運(yùn)輸車就是屬于這一范疇,低速自動駕駛的應(yīng)用區(qū)域包括校園、景區(qū)、園區(qū)、機(jī)場、礦山等,根據(jù)類別可以分為載人類、載貨類和專用車類等,可以使用的范圍包括特定區(qū)域的物流配送、礦山開采、無人機(jī)農(nóng)用機(jī)械、餐飲及零售等,低速自動駕駛技術(shù)多使用在運(yùn)輸貨物上,但在部分使用場景中也可以用來載人,如高爾夫球車、園區(qū)巴士、機(jī)場接駁車等。據(jù)了解保守估計,包含低速載人無人車、低速載貨無人車,無人作業(yè)車在內(nèi),2021年中國低速自動駕駛車銷量達(dá)2.5萬臺,2022年將達(dá)10.4萬臺,低速自動駕駛將成為我們?nèi)粘I钪械囊徊糠帧?/p>
低速自動駕駛的應(yīng)用場景很多且已經(jīng)相對成熟,如前文提到的自動快遞運(yùn)輸車,我國社會物流總費(fèi)用居高不下,除了經(jīng)濟(jì)結(jié)構(gòu)、產(chǎn)業(yè)布局、發(fā)展階段等客觀因素外,各種運(yùn)輸方式缺乏合理分工、物流路徑不夠優(yōu)化、貨物多次裝卸搬運(yùn)也使得物流環(huán)節(jié)過多,從而推高了物流成本。此外,隨著物流產(chǎn)業(yè)進(jìn)入每日億件包裹的時代,傳統(tǒng)人工作業(yè)已無法更好滿足日益增長的需求,簡而言之就是物流運(yùn)輸成本之高,快遞數(shù)量之多,運(yùn)輸方式不合理且現(xiàn)在很多快遞都會直接放置到快遞柜,無法直接交給用戶等問題一直存在,自動快遞運(yùn)輸車的出現(xiàn),就很好的解決了這個問題,自動快遞運(yùn)輸車的出現(xiàn),可以減少派送員的派送時間,解決了派送員最后100 m的配送難題,自動快遞運(yùn)輸車可以直接將快遞送到用戶家門口,且用戶可以通過手機(jī)端操作,告知派送時間,讓自動駕駛運(yùn)輸車可以優(yōu)化運(yùn)送路線。
類似于自動駕駛運(yùn)輸車等技術(shù)的低速無人駕駛的使用已經(jīng)相當(dāng)普遍,在其產(chǎn)品上,涉及了很多的自動駕駛技術(shù),比如每輛低速自動駕駛車輛上都融合了硬件、軟件、算法和通信等多種技術(shù),如自動駕駛所需的激光雷達(dá)、毫米波雷達(dá)、衛(wèi)星定位、慣導(dǎo)模塊等硬件設(shè)備及感知、定位、規(guī)劃、控制、數(shù)據(jù)存儲、仿真等技術(shù)都得到了應(yīng)用,包括汽車工業(yè)鏈中的線控底盤技術(shù)都在低速駕駛車輛上進(jìn)行了普及。
2021年10月29日在深圳召開的2021自動駕駛低速無人車商業(yè)應(yīng)用標(biāo)準(zhǔn)發(fā)布會上,由深圳市智能交通行業(yè)協(xié)會和低速無人車領(lǐng)域企業(yè)、專家共同編制的《低速無人車城市商業(yè)運(yùn)營安全管理規(guī)范》團(tuán)體標(biāo)準(zhǔn)正式實施。這是一部專為低速自動駕駛應(yīng)用所編制等首創(chuàng)性標(biāo)準(zhǔn),具有一定的先進(jìn)性和創(chuàng)新性,將對低速自動駕駛投放使用起到重要的指導(dǎo)作用。
隨著低速自動駕駛管理規(guī)范的制定及相關(guān)技術(shù)的提升,低速自動駕駛也將會更多地進(jìn)入我們?nèi)粘I睿退僮詣玉{駛與我們心目中所預(yù)期的自動駕駛技術(shù)并不相同,低速自動駕駛依舊是自動駕駛的早期形態(tài),在前文提及低速自動駕駛的概念中提出,低速自動駕駛是時速低于50 km/h,即低速自動駕駛車輛的運(yùn)行速度是很低的,其致死率、破壞性也比較低,速度也遠(yuǎn)遠(yuǎn)達(dá)不到載人在城市道路上運(yùn)行的要求。其次就是低速自動駕駛車輛的應(yīng)用范圍多在園區(qū)或規(guī)定的區(qū)域,限定的環(huán)境就意味著未知的干擾的可能性極低,系統(tǒng)的硬件成本和軟件開發(fā)成本也會大大降低,當(dāng)將低速自動駕駛車輛從平時工作的區(qū)域放置到另一個新的場景后,將無法被使用,這也是與我們心目中自動駕駛區(qū)別最大的一個因素,但也正因為其低速和限定范圍等因素,讓低速自動駕駛汽車在技術(shù)實現(xiàn)和商業(yè)落地上具有很大的優(yōu)勢。
最后和大家來聊聊自動駕駛的發(fā)展,最近在與一位大拿聊天時探討了相關(guān)的話題,現(xiàn)在無論是低速自動駕駛,還是在部分地區(qū)投放的自動駕駛載人出租,都有一個共同的問題,即場景使用的局限性,當(dāng)在這一地區(qū)投放的自動駕駛車輛或低速自動駕駛車輛,投放前期要做的一件事就是將該地的道路信息進(jìn)行全面的掃描,之后才可以進(jìn)行應(yīng)用,當(dāng)?shù)缆沸畔⒆儞Q或進(jìn)入一個新的場景后,就需要對道路信息進(jìn)行新一輪的掃描。這樣的發(fā)展模式就像是教小朋友走路一樣,有一個東西扶持著走路,小朋友只需要會走即可,簡而言之就是現(xiàn)在的自動駕駛發(fā)展模式讓自動駕駛汽車并不智能,只是在部分場景下的自動駕駛。如果一直依照這樣的發(fā)展模式,在自動駕駛落地后將需要花費(fèi)大量的人力、財力,如車輛投放具有范圍的限制性,只能在規(guī)定區(qū)域行駛,道路進(jìn)行修繕后,需要立刻完成相關(guān)區(qū)域的道路信息掃描。
如果想要真正實現(xiàn)自動駕駛商用化,就需要教會自動駕駛汽車和人類一樣辨別道路,識別路況,完成自動駕駛,而這一步恰是最難的,無論是通過智能網(wǎng)聯(lián)的發(fā)展模式,讓道路信息和車輛信息實現(xiàn)共享互通,還是通過將單車智能做到極致化,讓自動駕駛汽車實現(xiàn)人類一樣的辨別能力,都是實現(xiàn)自動駕駛不可避免的一步,授人以魚,不如授人以漁,教會自動駕駛汽車看路、識路,比教會自動駕駛汽車走路更為重要,這也是影響自動駕駛技術(shù)急需突破的難點(diǎn),關(guān)于自動駕駛和低速自動駕駛,大家怎么看?歡迎關(guān)注智駕最前沿,留言交流。
-
自動駕駛
+關(guān)注
關(guān)注
785文章
13930瀏覽量
167007 -
智能網(wǎng)聯(lián)汽車
+關(guān)注
關(guān)注
9文章
1095瀏覽量
31153
發(fā)布評論請先 登錄
相關(guān)推薦
主線科技AiTrucker自動駕駛創(chuàng)新應(yīng)用獲評精品案例
AK2超聲波雷達(dá):自動駕駛低速巡航的精準(zhǔn)感知來源

一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新


汽車?yán)走_(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場景
基于場景的自動駕駛驗證策略


自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL

RISC-V適合什么樣的應(yīng)用場景
FPGA在自動駕駛領(lǐng)域有哪些優(yōu)勢?
FPGA在自動駕駛領(lǐng)域有哪些應(yīng)用?
標(biāo)貝數(shù)據(jù)采集標(biāo)注在自動駕駛場景中落地應(yīng)用實例

未來已來,多傳感器融合感知是自動駕駛破局的關(guān)鍵
自動駕駛發(fā)展問題及解決方案淺析
自動駕駛測試場景深度解析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論