 KUKA機器人高級編程SWRITE的用法
KUKA機器人高級編程SWRITE的用法
SWRITE
SWRITE 具有與 CWRITE 類似的功能和語法。但是,與 CWRITE 不同的是,SWRITE 不會將數據寫入通道,而是寫入 CHAR 數組。
SWRITE 可以與 CWRITE 結合在程序中。好處:
lCWRITE 可以限制為將數據寫入通道。SWRITE 可以執行更復雜的格式化任務。這使得程序更加靈活。
lCWRITE 最多可以處理 10 個變量。結合多個SWRITE語句,可以寫入10多個變量的數據。
SWRITE 觸發提前運行停止。
SWRITE (String, State, OFFSET , Format, Var1 <, var10="">)
String: Type: CHAR[]
Var 變量的格式化內容被寫入字符串。
State:Type: STATE_T
自動返回到 WRITE 的狀態
OFFSET : Type: INT
SWRITE 在字符串中開始寫入的位置。如果要從頭開始寫入,則偏移量必須設置為 0。
例如:
OFFSET=0 : SWRITE 從第一個位置開始寫入。
OFFSET=2 : SWRITE 從第三個位置開始寫入。位置 1 和 2 被忽略。
偏移量在寫入期間遞增。如果在另一個 SWRITE 語句的情況下,要從第一個位置重新開始寫入,則必須在此語句之前將偏移量設置為 0。否則,將接受前一條語句的增量偏移量。
Format: Type: CHAR[]
在將 Var 變量寫入字符串之前轉換它們。必須為每個 Var 變量指定格式.
Var:
其數據寫入字符串的變量。每個語句最多可以有 10 個變量。
例如:
體現出報警信息:
OFFSET=0
SWRITE(user_msg.msg_TXT[],ST_AUSG,OFFSET,"Totzeit Achse%d nach Testlauf= %d *12ms ",(EaxNum+6), TotzeitNeu)
Format :CWRITE/SWRITE 的“格式”變量
CWRITE 或 SWRITE 的格式規范具有以下結構:“ %U”
格式化字符。可選的。
多個格式字符可以應用于一個格式。
|
格式化字符 |
描述 |
|
+ |
轉換后的值總是以符號開頭:正值帶 +,負值帶 -。 如果不使用此格式化字符,則正值不帶符號表示,負值用 - 表示。 |
|
- |
轉換后的值左對齊。 |
|
# |
在格式 x 中,每個不等于 0 的值都以 0 開頭。 在格式 e、f 和 g 中,總是插入小數點。 |
|
0 |
轉換后的值前面加上零以構成最小寬度 W。 |
|
[Space] |
在格式 d、e、f、g 或 i 中,轉換后的參數前面有一個空格。 |
|
* |
格式 c 和 r 并不總是正確解釋數據字符串中的空格。為避免誤解,可以對空格使用帶星號 (*) 的特殊格式規范。 因此,以該字符開頭的格式不再對應于 Var 變量之一,而是對應于數據字符串中的空格。 |
要輸出的最小位置數。可選的。
小數點被視為有助于彌補最小數字,前置符號則不然。為了達到最小數量,在末尾添加零字節(以小端格式)。必要時可以超過最小數量。
例子:
? VAR=1.56
"%+8.4d", VAR
結果: _ _ + 1 . 5 6 0 0
VAR=125.568
"%+8.4d", VAR
結果: + 1 2 5 . 5 6 8 0
如果寬度指定為 0x,這意味著要輸出的位置用零填充。
例子:
? VAR=1
"%+04d", VAR
Result: + 0 0 0 1
與不帶0的規格相比:
? "%+4d", VAR
Result: _ _ _ + 1
如果未指定寬度,則使用以下默認寬度:
INT, REAL, ENUM: 4 bytes
BOOL, CHAR: 1 byte
精度規格
r 在數組的情況下: 要表示的數組元素數.
e, f:要表示的數組元素數.
G: 有效數字位數
S: 表示的最大字符數
所有其他格式: 要表示的字符數。如果源值包含更多字符,則會被截斷或四舍五入。
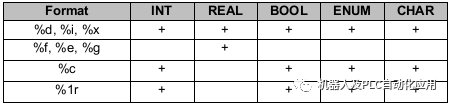
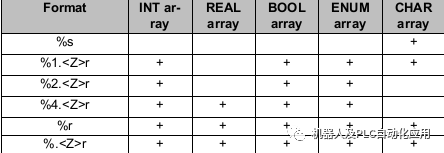
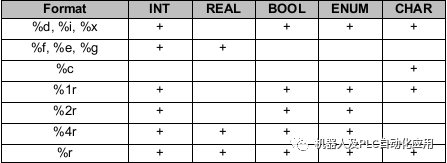
對于大多數數據類型,有幾種允許的格式,例如 "%s" 和 "%1.r" 用于 CHAR 數組。需要選擇哪種格式取決于伙伴控制器發送或接收數據的方式。
在數組的情況下,規范“Z”可用于定義要考慮的數組元素的數量。如果沒有為“Z”指定值,則考慮所有數組元素。然而,該過程在第一個未初始化的值處中止。一個例外是格式 r。在這種情況下,該過程不會中止。相反,為尚未初始化的變量或數組元素輸出隨機值。

數據類型 BOOL
每個不等于零的值都轉換為 TRUE
數據類型枚舉
系統檢查該值是否為允許的 ENUM 值。如果不是,則中止讀取。第一個 ENUM 常量的值為 1。
數組的格式規范
如果沒有足夠的可用數據來滿足格式規范(例如“%2.5r”,但僅存在 7 個字節),則不會讀取此格式的任何內容并中止 CREAD 語句。被忽略的數據仍然可供讀取。
格式 %r
只讀取變量所能容納的字節數。其余的仍然可以閱讀。如果數組足夠大但字節數不是數組元素大小的倍數,則冗余字節仍可用于讀取(對于以下格式或下一個 CREAD 語句)。
轉換示例:
例子1
整數變量 VI 的值以十進制和十六進制 ASCII 表示法傳輸。第一個 CWRITE 語句傳輸字符 123。第二個 CWRITE 語句傳輸字符 7B。
INT VI
VI=123
CWRITE(HANDLE,SW_T,MW_T,"%d",VI)
CWRITE(HANDLE,SW_T,MW_T,"%x",VI)
例子2
整數變量 VI 的值以二進制表示法傳輸:
INT VI
VI=123
CWRITE(HANDLE,SW_T,MW_T,"%r",VI)
例子3
傳輸數組的所有數組元素:
REAL VR[10]
CWRITE(HANDLE,SW_T,MW_T,"%r",VR[])
使用“%r”格式時,系統不會檢查變量或數組元素是否已初始化。為尚未初始化的數組元素傳輸隨機值。
例子4
數組的前五個數組元素以二進制表示法傳輸:
REAL VR[10]
CWRITE(HANDLE,SW_T,MW_T,"%.5r",VR[])
20 個字節以二進制表示法傳輸。
例子5
傳輸直到第一個未初始化元素的所有數組元素:
CHAR VS[100]
CWRITE(HANDLE,SW_T,MW_T,"%s",VS[])
例子6
傳輸前 50 個數組元素:
CHAR VS[100]
CWRITE(HANDLE,SW_T,MW_T,"%s",VS[])
例子7
ENUM 常量的內部值以 ASCII 符號傳輸。對應號碼轉:
DECL ENUM_TYP E
CWRITE(HANDLE,SW_T,MW_T,"%d",E)
例子8
兩個 REAL 值與附加文本一起傳輸:
REAL V1,V2
V1=3.97
V2=-27.3
CWRITE(...,...,...,"value1=%+#07.3f value2=+#06.2f",V1,V2)
傳輸以下數據:
value1=+03.970
value2=-27.30
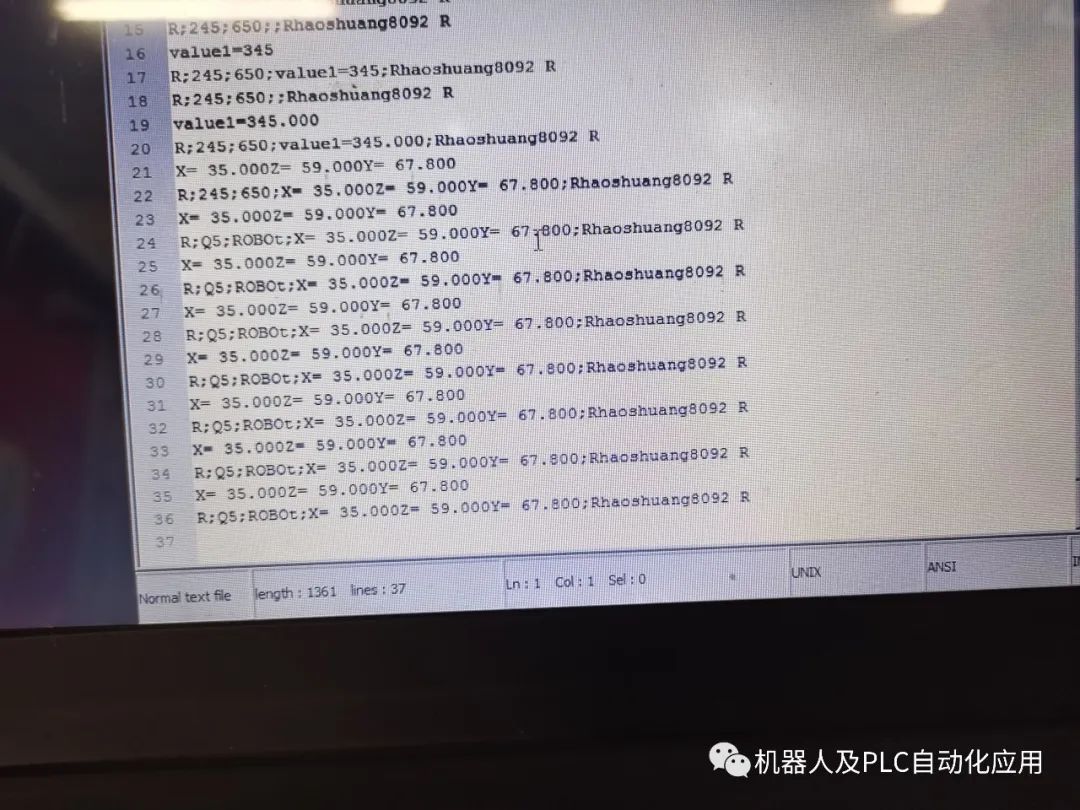
在大眾版本內的設置事例
SWRITE(USER_MSG.MSG_TXT[],stat,offset,"EKI:DatensatzB X=%7.2f,Y=%7.2f,Z=%7.2f,A=%7.2f,B=%7.2f,C=%7.2f ",EKI_B.X,EKI_B.Y,EKI_B.Z,EKI_B.A,EKI_B.B,EKI_B.C)
將多個浮點數據寫入在USER_MSG.MSG_TXT[]字符串里.
SWRITE(USER_MSG.MSG_txt[],STATE, OFFSET, "TCP alt X=%.1F Y=%.1F Z=%.1F",TOOL_DATA[COR_TOOL_NO].x,TOOL_DATA[COR_TOOL_NO].y,TOOL_DATA[COR_TOOL_NO].z)
將TOOL_DATA的數據寫入到字符串USER_MSG.MSG_txt[]里,用來顯示TCP.
通過SWRITE的功能我們就可以實現了浮點數存入到字符串的功能.
SWRITE(USER_MSG.MSG_TXT[],STATE,OFFSET,"%s %s",sMeldFunction[],USER_MSG.MSG_TXT[])
將字符串寫入到USER_MSG.MSG_TXT[]字符串里
通過SWRITE功能我實現了歷史的突破!
-------------------------END---------------------
審核編輯 :李倩
-
變量
+關注
關注
0文章
613瀏覽量
28466 -
數組
+關注
關注
1文章
417瀏覽量
26028
原文標題:KUKA機器人高級編程SWRITE的用法
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
使用 Thonny 對 XRP 機器人進行編程

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)

工業機器人編程流程及注意事項
工業機器人的四種編程(示教編程、離線編程、自增強現實編程主編程)剖析!

Al大模型機器人
工業機器人任務編程基本流程
如何使用PLC控制機器人
工業機器人仿真軟件有哪些
abb工業機器人的編程語言是什么

KUKA機器人8.7系統對PROFINET軟件進行編程控制的步驟






 工商網監
工商網監
評論