 慣性導航技術的發展歷程
慣性導航技術的發展歷程
導讀:慣性導航系統(INS,Inertial Navigation System)是一種利用慣性敏感器件、基準方向及最初的位置信息來確定運載體在慣性空間中的位置、方向和速度的自主式導航系統,也簡稱為慣導。
慣性導航技術的發展歷程
第一代慣性導航技術指 1930 年以前的慣性技術,奠定了整個慣性導航發展的基礎。牛頓三大定律成為慣性導航的理論。第二代慣性技術開始于上世紀 40 年代火箭發展的初期,其研究內容從慣性儀表技術發展擴大到慣性導航系統的應用。70 年代初期,第三代慣性技術發展階段出現了一些新型陀螺、加速度計和相應的慣性導航系統,其研究目標是進一步提高INS 的性能,并通過多種技術途徑來推廣和應用慣性技術。當前,慣性技術正處于第四代發展階段,其目標是實現高精度、高可靠性、低成本、小型化、數字化、應用領域更加廣泛的導航系統。比如隨著量子傳感技術的迅速發展,在慣性導航技術中,利用原子磁共振特性構造的微小型核磁共振陀螺慣性測量裝置具有高精度、小體積、純固態、對加速度不敏感等優勢,成為新一代陀螺儀的研究熱點方向之一。
慣性導航的組成
慣性導航包括慣性測量單元(Inertial Measurement Unit,簡稱IMU)和計算單元兩大部分。通過IMU感知物體方向、姿態等變化信息,再經過各種轉換、補償計算得到更準確的信息。比如檢測物體的初始位置、初始朝向、初始姿態以及接下來每一刻朝向、角度的改變,然后把這些信息加一起不停地推,推算出物體現在的朝向和位置。
IMU主要由加速度計和陀螺儀組成,可實時檢測物體的重心方向、俯仰角、偏航角等信息,如果還加上電子羅盤和氣壓計等傳感器,那IMU的測量信息量與精度也相應地能得到一定的提高。而計算單元則主要由姿態解算單元,積分單元和誤差補償單元這三部分組成。
慣性導航的工作原理
慣性導航的目的是實現自主式導航,即不依賴外界信息,包括衛星信號、北極指引等。那么慣性是如何實現的呢?慣性導航工作的核心原理是:它從過去自身的運動軌跡推算出自己目前的方位。其工作技術原理不外乎就是以下三條基本公式:距離=速度×時間,速度=加速度×時間,角度=角速度×時間。首先,檢測(或設定好)初始信息,包括初始位置、初始朝向、初始姿態等。然后,用IMU時刻檢測物體運動的變化信息。其中,加速度計測量加速度,利用原理 a=F/M,測量物體的線加速度,然后乘以時間得到速度,再乘以時間就得到位移,從而確定物體的位置;而陀螺儀則測量物體的角速率,以物體的初始方位作為初始條件,對角速率進行積分,進而時刻得到物體當前方向;還有電子羅盤,能在水平位置確認物體朝向。這3個傳感器可相互校正,得到較為準確的姿態參數。最后,通過計算單元實現姿態解、加速度積分、位置計算以及誤差補償,最終得到準確的導航信息。另外重點講講慣性導航是如何通過坐標系模型實現定位的?日常生活中,我們都通過坐標來定位,二維定位是x軸和y軸,三維定位則加上z軸。通過x軸、y軸和z軸的坐標系模型,傳感器能夠測量各軸方向的線性運動,以及圍繞各軸的旋轉運動。但在實際應用慣性導航中,慣性測量器件是直接安裝在運動載體上的,因此慣性器件測得的角速度和加速度的數值都是在載體運動坐標系下的量,即傳感器得到的是以物體的固連坐標系為參照的數據(也叫地理坐標系),但我們日常定位用的是地球坐標系,因此如何把測得的固連坐標系數據轉換成地球坐標系數據,是慣性導航重要的第一步。此時,需要引入一個第三者才能實現坐標系轉換,即相對靜止的慣性坐標系——地心慣性系。地心慣性系:以地球的地心為原點,以地心指向春分點和秋分點的連線為X軸、Y軸,以地球自轉軸指向北極為Z軸組成的右手坐標系。因為春分點和秋分點不是地球表面上和地球固定的兩個點,而是地球所屬宇宙空間中兩個固定的點(因為赤道面和黃道面是固定的面)。所以,春分點和秋分點不會因為地球的自轉而移動,故地心慣性系是相對靜止的,不會隨地球自轉而移動。
地球坐標系:同樣以地球的地心為原點,x 軸穿過本初子午線(0度經線)和赤道的交點,z 軸沿著自轉軸指向北極點,xyz 軸成右手系。明顯,x 軸是隨地球自轉而移動,故地球坐標系是相對運動的,會隨地球自轉而移動。
地理坐標系:以運載體(如下圖的P)的中心為坐標原點,x 軸指向正東方向,y 軸指向正北方向,z 軸垂直指向天上。地理坐標系會隨運載體的移動而移動。
當運載體運行到地球的 P 點位置時,對應的地球坐標是什么呢?地理坐標系需要怎樣旋轉才能和地球坐標系重合呢?即兩者如何實現變換?其實就是通過一系列復雜的數字運算,簡單而言,便是通過對應的旋轉矩陣實現兩個坐標系之間的旋轉變換。
慣性導航系統主要的優點
1、完全依靠運動載體自主地完成導航任務,不依賴于任何外部輸入信息,也不向外輸出信息的自主式系統,所以具備極高的抗干擾性和隱蔽性;2、不受氣象條件限制,可全天候、全天時、全地理的工作。慣導系統不需要特定的時間或者地理因素,隨時隨地都可以運行;3、提供的參數多,比如GPS衛星導航,只能給出位置,方向,速度信息,但是慣導同時還能提供姿態和航向信息;4、導航信息更新速率高,短期精度和穩定性好。目前常見的GPS更新速率為每秒1次,但是慣導可以達到每秒幾百次更新甚至更高。
慣性導航系統主要的缺點
1、導航誤差隨時間發散,由于導航信息經過積分運算產生,定位誤差會隨時間推移而增大,長期積累會導致精度差;2、每次使用之前需較長的初始對準時間。慣性導航需要初始對準,且對準復雜、對準時間較長;3、不能給出時間信息;4、精準的慣導系統價格昂貴,通常造價在幾十到幾百萬之間。
慣性導航的分類
從結構上分,慣導可分兩大類:平臺式慣導系統和捷聯式慣導系統。平臺式慣性導航系統有實體的物理平臺,陀螺和加速度計置于由陀螺定的平臺上,該平臺跟蹤導航坐標系,以實現速度和位置解算,姿態數據直接取自于平臺的環架。由于平臺式慣導系統框架能隔離運動載體的角振動,儀表工作條件較好,原始測量值采集精確,并且平臺能直接建立導航坐標系,計算量小,容易補償和修正儀表的輸出,但是其結構比較復雜,體積大,成本高且可靠性差。捷聯式慣性導航系統沒有實體的物理平臺,把陀螺和加速度計直接固定安裝在運動載體上,實質上是通過陀螺儀計算出一個虛擬的慣性平臺,然后把加速度計測量結果旋轉到這個虛擬平臺上,再解算導航參數。捷聯式慣性導航系統結構簡單、體積小、維護方便,但陀螺儀和加速度計工作條件不佳,采集到的元器件原始測量值精度低。同時,捷聯慣導的加速度計輸出的是載體坐標系的加速度分量,需要經計算機轉換成導航坐標系的加速度分量,計算量較大,且容易產生導航解算的校正、起始及排列轉換的額外誤差。總體來說,捷聯慣導精度較平臺慣導低,但可靠性好、更易實現、成本低,是目前民用慣導的主流技術。
慣性導航主要的應用
慣性導航產業最早起步于軍用,如航天、航空、制導武器、艦船、戰機等領域,隨著電子技術的發展和商業價值的挖掘,慣性導航技術的應用擴展到車輛導航、軌道交通、隧道、消防定位、室內定位等民用領域,甚至在無人機、自動駕駛、便攜式定位終端(如智能手機、兒童/老人定位追蹤器等)中也被廣泛應用。
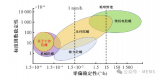
慣導系統為運動載體提供位置、速度、姿態(航向角、俯仰角、橫滾角)等信息,不同應用領域對慣性元器件性能和慣導精度的要求各不相同。從精度方面來看,航空航天、軌道交通領域對即時定位精度要求高,且要求連續工作時間長;從系統壽命來看,衛星、空間站等航天器要求最高,因其發射升空后不可更換或維修;涉及到軍事應用等領域,對可靠性要求較高;對于民用領域,如車輛導航、室內定位、無人機、自動駕駛等應用,對慣導系統的性價比要求高。總體來說,由于慣導系統的誤差累積性和對初始校準的前提要求,一般不能單獨使用,只能作為其他主定位導航技術(如GNSS定位、UWB定位、WLAN定位、地磁定位等)的輔助,比如車輛在GPS導航過程中,在失去GPS信號的情況下能夠利用自帶的加速度和陀螺儀進行慣性導航。因此需要結合具體行業應用需求,有針對性的對慣導元器件和導航算法進行選型。
-
傳感器
+關注
關注
2553文章
51390瀏覽量
756572 -
導航技術
+關注
關注
0文章
34瀏覽量
9625 -
GPS衛星
+關注
關注
0文章
9瀏覽量
9344
原文標題:全面解讀慣性導航系統與技術,看懂只需這一篇!
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
慣性傳感器的分類和應用
藍牙技術的發展歷程和工作原理
淺談慣性導航產品的對齊安裝角度
LP-SCADA的發展歷程和應用行業?
直徑測量工具的發展歷程
未來隧道定位導航技術有哪些發展趨勢

室外牽引AGV:慣性測量+衛星定位+激光雷達,我全都要!

AGV慣導應用之無人牽引車慣性測量單元IMU

3D視覺技術在慣性環上料領域的未來發展
AGV小車上的慣性導航模塊運用——SGPM02

【行業前沿】量子技術+慣性導航,美國海軍研究實驗室的最新研究成果
基于原子體系的量子慣性傳感器研究現狀綜述
導遠科技在北京車展展示其自主研發的新一代MEMS慣性導航芯片






 工商網監
工商網監
評論