 UART通訊過程詳解
UART通訊過程詳解
UART通用異步收發傳輸器(Universal Asynchronous Receiver/Transmitter),通信雙方接三根線,RX、TX和GND。其中,TX用于發送數據,RX用于接受數據,雙方收發交叉對接,支持全雙工方式。
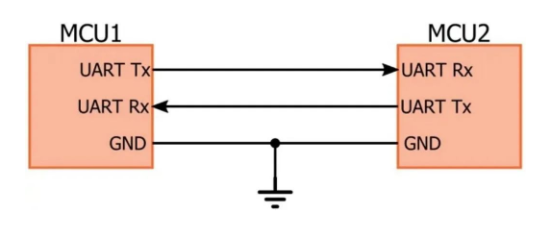
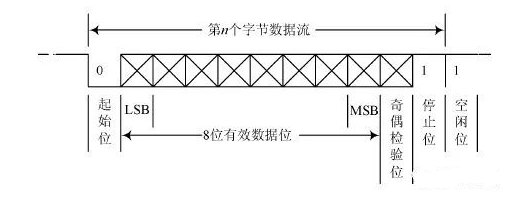
如A發數據到B,平時空閑時A.TX和B.RX.保持1,當A.TX先發0作為起始位,告訴B請注意,我要發數據了。然后就開始發數據,數據位可配置,通常是5位,6位,7位,8位,一幀數據發完后,A.TX給個高電平告訴B.RX我發完了一幀。如果開啟校驗位,在發停止位之前發送個校驗位,一般都不需要校驗位了,短距離有線傳輸出錯的概率非常小。如果還有數據,則重復前面的操作。
一般軟件配置串口,有波特率,數據位、停止位、校驗位、流控。分別表示傳輸速度,一幀數據的長度,以及發完告知停止,發完是否校驗,是否進行發送控制。看起來參數很多,針對個人經驗,一般都是固定8位數據位,1位停止位、無校驗、無流控,只是配置波特率。UART沒有時鐘控制數據捕獲時機,依靠通信前就定義波特率,雙方按定義的頻率讀寫數據位,正如裘千丈的水上漂,一旦暗樁安裝固定,就得按固定的步長行走,否則就會出錯落水。UART在水上漂項目可以,但是傳輸效率有限,一般高到921600,如果再高可能出現誤碼,繼續加高,就是高空飛行。
審核編輯:湯梓紅
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳輸器
+關注
關注
0文章
39瀏覽量
13008 -
串口
+關注
關注
14文章
1558瀏覽量
77062 -
uart
+關注
關注
22文章
1243瀏覽量
101774
發布評論請先 登錄
相關推薦
詳解UART轉CAN應用方案
各位工程師是否遇到需要使用到CAN通信但缺少CAN接口的情況?最簡便的方案是采用UART轉CAN通訊。ZLG致遠電子針對此應用CSM100系列模塊解決方案,這款模塊將極大的簡化了開發流程,實現的方式是怎樣的?本文為你詳解。

ARM中基于DMA的高效UART通訊及其應用
在UART通訊中,通過采取DMA方式,直接將UART接收的數據轉移到設定好的RAM區,然后設置相應的全局標志,通知主程序數據可用就可以了。
發表于 04-16 16:32
?7742次閱讀

UART通訊模塊介紹
功耗,并且集成了豐富的外設模塊,可以滿足工業和消費等多種應用。MSP430FR2311中的eUSCI_A0支持UART通訊,本文對此UART模塊的寄存器配置進行了詳細的分析和計算,以幫助工程師對此
UART串口通訊
UART串口通訊總結前言串口的基本概念串口配置的基本屬性串口(Serial port)和RS-232串口通訊流控制前言此篇文章為轉載,轉載地址為uart串口
發表于 12-20 19:31
?24次下載

振弦采集模塊的通訊速率和軟件握手( UART)
振弦采集模塊的通訊速率和軟件握手( UART) 1 通訊速率 VMXXX 的 UART 接口支持 9600~460800bps 通訊速率,通
發表于 11-23 10:11
?453次閱讀





 工商網監
工商網監
評論