") 通過(guò)RepSurf點(diǎn)云結(jié)構(gòu)實(shí)現(xiàn)多項(xiàng)任務(wù)SOTA
通過(guò)RepSurf點(diǎn)云結(jié)構(gòu)實(shí)現(xiàn)多項(xiàng)任務(wù)SOTA
01 、摘要
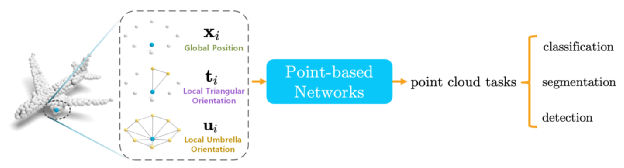
大多數(shù)先前的工作通過(guò)坐標(biāo)表示點(diǎn)云的形狀。然而,直接利用坐標(biāo)描述局部幾何是不充分的。在本文中,我們提出了 RepSurf(representative surface),這是一種新穎的點(diǎn)云表示,顯式的描述了非常局部的點(diǎn)云結(jié)構(gòu)。
我們探索了 RepSurf 的兩種變體,Triangular RepSurf 和 Umbrella RepSurf,其靈感來(lái)自計(jì)算機(jī)圖形學(xué)中的三角形網(wǎng)格和傘形曲率。我們?cè)诒砻嬷亟ê笸ㄟ^(guò)預(yù)定義的幾何先驗(yàn)計(jì)算 RepSurf 的表征。RepSurf 可以成為絕大多數(shù)點(diǎn)云模型的即插即用模塊,這要?dú)w功于它與無(wú)規(guī)則點(diǎn)集的自由協(xié)作。
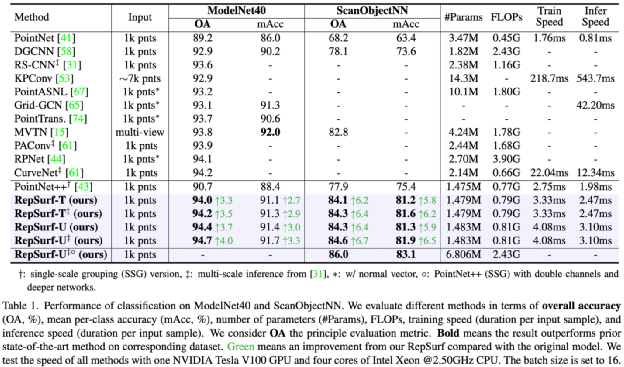
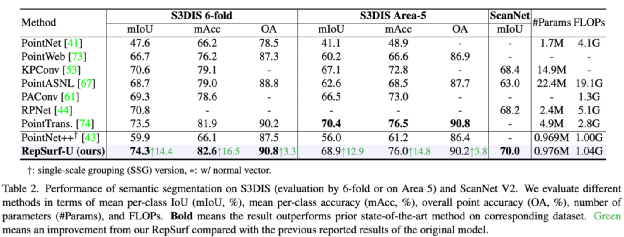
基于 PointNet++(SSG 版本)的簡(jiǎn)單基線,Umbrella RepSurf 在各種基準(zhǔn)上的分類(lèi)、分割和檢測(cè)在性能和效率方面都大大超過(guò)了之前的 state-of-the-art。在只有0.008M參數(shù)數(shù)量、0.04G FLOPs 和 1.12ms推理時(shí)間的增的情況下,我們的方法在分類(lèi)數(shù)據(jù)集 ModelNet40 上達(dá)到 94.7% (+0.5%),在 ScanObjectNN 上達(dá)到 84.6% (+1.8%) ;而在分割任務(wù)的 S3DIS 6-fold 上達(dá)到74.3%(+0.8%) mIoU,在ScanNet 上達(dá)到70.0% (+1.6%) mIoU 。
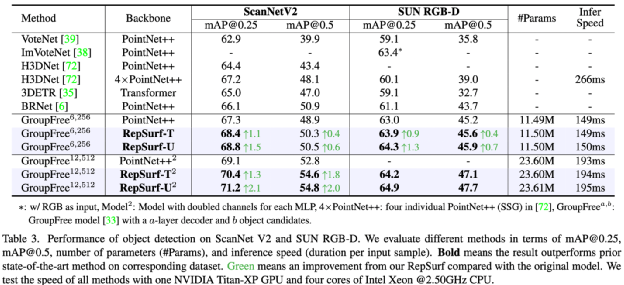
對(duì)于檢測(cè)任務(wù),我們的 RepSurf 應(yīng)用于最先進(jìn)的檢測(cè)器,并在 ScanNetV2 上達(dá)到71.2% (+2.1%) mAP25、54.8% (+2.0%) mAP50 和在 SUN RGB-D數(shù)據(jù)集上64.9% (+1.9%) mAP25、47.7% (+ 2.5%) mAP50的性能。我們的輕量級(jí)Triangular RepSurf 在這些基準(zhǔn)測(cè)試中同樣表現(xiàn)出色。
02、 介紹
對(duì)原始點(diǎn)云表征(Point Cloud Representation)的處理因其在自動(dòng)駕駛、增強(qiáng)現(xiàn)實(shí)和機(jī)器人技術(shù)等各種應(yīng)用中的優(yōu)勢(shì)而引起了相當(dāng)大的關(guān)注。但是,點(diǎn)云局部表征的不穩(wěn)定性使得這個(gè)任務(wù)非常有難度。
局部形狀對(duì)于點(diǎn)云的學(xué)習(xí)至關(guān)重要。為了從局部結(jié)構(gòu)信息中學(xué)習(xí),一些先前的工作從Grid(例如PointCNN)、Relation(例如RS-CNN)或Graph(例如DGCNN)中學(xué)習(xí)。
然而,這些方法通過(guò)加入更多成分(如歐幾里得距離、注意力機(jī)制)或應(yīng)用各種變換(如圖形構(gòu)造、體素化)隱式地從點(diǎn)云shape中提取局部特征。這些可能導(dǎo)致復(fù)雜的預(yù)處理或大量計(jì)算。我們認(rèn)為這可能會(huì)導(dǎo)致在預(yù)定義成分時(shí)遺漏信息,或在轉(zhuǎn)換過(guò)程中損失幾何形狀。因此,本文探索了更穩(wěn)定的顯式點(diǎn)云局部表征。
03、 動(dòng)機(jī)
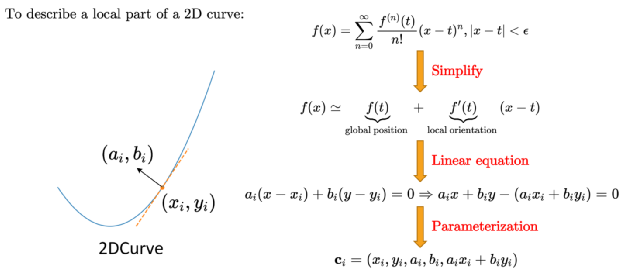
我們首先受到泰勒級(jí)數(shù)的啟發(fā)。泰勒級(jí)數(shù)用導(dǎo)數(shù)表示局部曲線。為了簡(jiǎn)化它,我們只考慮到二階導(dǎo)數(shù)。因此,我們可以通過(guò)其對(duì)應(yīng)的切線粗略地表示局部曲線,或者我們稱(chēng)之為 3D 點(diǎn)云中的“surface”。
04、 方法
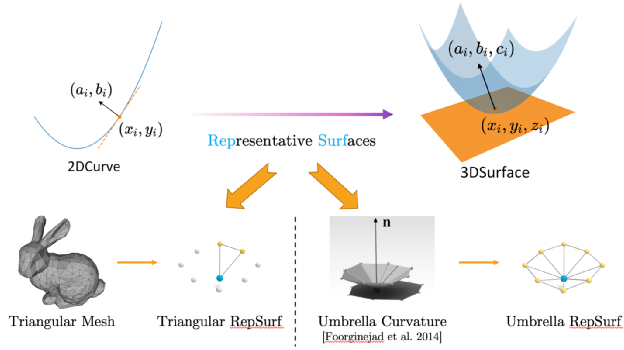
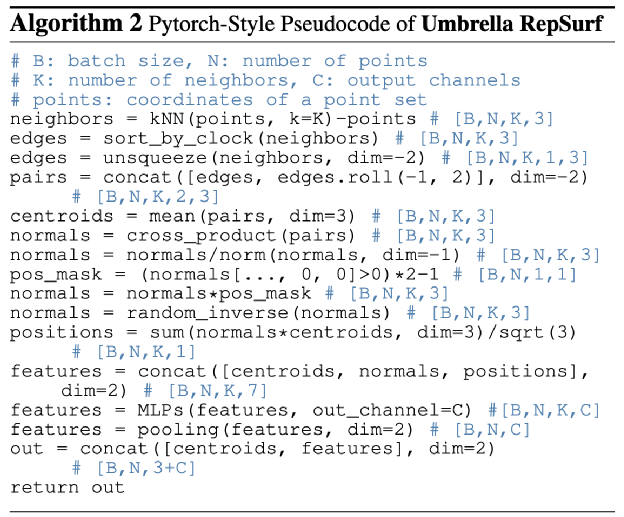
為了將2D Curve擴(kuò)展到3D Surface,我們引入了兩種RepSurf變體(Triangular RepSurf和Umbrella RepSurf)來(lái)近似的描述點(diǎn)云局部特征:
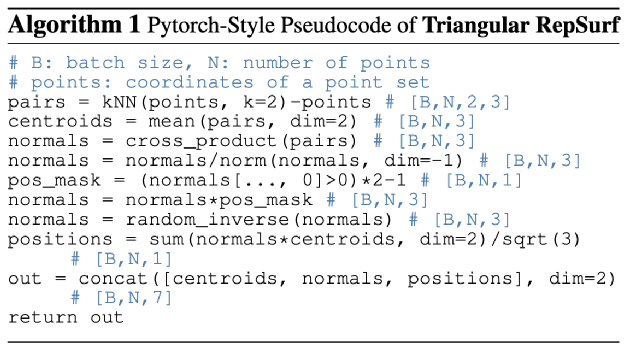
兩種RepSurf的實(shí)現(xiàn)也非常簡(jiǎn)潔:
05 、實(shí)驗(yàn)
RepSurf分別在3D分類(lèi)(ModelNet40,ScanObjectNN)、分割(S3DIS,ScanNet)、檢測(cè)(ScanNetV2,SUN RGBD)上達(dá)到了不俗的效果:
06 、結(jié)論
我們希望我們的工作能夠激發(fā)3D社區(qū)并喚起對(duì)點(diǎn)云的顯示表征的重新思考。我們認(rèn)為 RepSurf 值得在不同領(lǐng)域(例如自動(dòng)駕駛)或更大規(guī)模的點(diǎn)云上進(jìn)行進(jìn)一步探索,因?yàn)?RepSurf 有能力去處理真實(shí)場(chǎng)景中的大量背景點(diǎn)。RepSurf 還可以通過(guò)其對(duì)幾何敏感度的能力對(duì)點(diǎn)云采樣帶來(lái)幫助。
審核編輯:郭婷
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28646瀏覽量
208430 -
增強(qiáng)現(xiàn)實(shí)
+關(guān)注
關(guān)注
1文章
712瀏覽量
45065 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
785文章
13932瀏覽量
167016
原文標(biāo)題:CVPR 2022 | 增加0.008M參數(shù),顯式局部點(diǎn)云表征實(shí)現(xiàn)多項(xiàng)任務(wù)SOTA
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
NB81是否支持OneNet SOTA功能?應(yīng)該如何激活SOTA?
如何采用Android云計(jì)算實(shí)現(xiàn)移動(dòng)點(diǎn)餐系統(tǒng)的設(shè)計(jì)?
SOTA的定義是什么?常規(guī)的實(shí)現(xiàn)方式有哪些
怎樣通過(guò)LoRa模塊實(shí)現(xiàn)SX1268點(diǎn)對(duì)點(diǎn)通信呢
基于OpenHarmony的華為云IoT智慧路燈實(shí)現(xiàn)
云任務(wù)閾值調(diào)度算法
3D 點(diǎn)云的無(wú)監(jiān)督膠囊網(wǎng)絡(luò) 多任務(wù)上實(shí)現(xiàn)SOTA
通過(guò)引入實(shí)例 scale-uniform 采樣策略與 crop-aware 邊框回歸損失實(shí)現(xiàn) SOTA 性能
SOTA機(jī)制詳解

三維點(diǎn)云數(shù)據(jù)的兩種結(jié)構(gòu)Kdtree和Octree
AURIX TC3XX系列最佳的SOTA方案
通過(guò)A2B更新軟件—A2B如何給汽車(chē)應(yīng)用中的SOTA帶來(lái)變革
人工智能SOTA什么意思
三項(xiàng)SOTA!MasQCLIP:開(kāi)放詞匯通用圖像分割新網(wǎng)絡(luò)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論