 基于DSP的交流伺服電機控制系統
基于DSP的交流伺服電機控制系統
DSP(Digital Signal Processor)是一種非常獨特的數字信號微處理器,顧名思義,DSP是以數字信號來處理工作中的大量信息的電子器件。其工作原理是接收傳來的模擬信號,然后轉換為0或1的數字信號,再通過對數字信號的修改、刪除、強化,在其他的系統芯片中把數字數據解譯回模擬數據或實際環境格式。
一、 交流伺服電機的控制原理
1、 伺服控制
目前,理論界關于伺服控制概念的提法很多,但是,這些提法都同意伺服控制是指對物體運動的有效控制,即對物體運動的速度、位置、加速度進行控制。這種控制正在變得隨處可見和越來越普遍。
2、 伺服組件
伺服組件是由伺服電動機、機械減速或這耦合機構、伺服控制器以及傳感器等部件組成的一體化的有機伺服機構。
3、 交流電機的伺服控制
交流伺服電機的主體是由內部的永磁體轉子、驅動控制器以及U/V/W三相電形成的電磁場構成。電機工作時,轉子在此磁場的作用下開始轉動,同時交流伺服電機自帶的編碼器會反饋信號給驅動器,而驅動器則根據反饋值與編碼的目標值進行比較,以調整轉子轉動的角度。可以說交流伺服電機的精度決定于編碼器的精度。更高級的交流伺服電機的控制系統也更加精確和復雜,往往會包涵包括驅動器在內的多層微機控制。
二、 交流伺服電機控制系統的總體結構
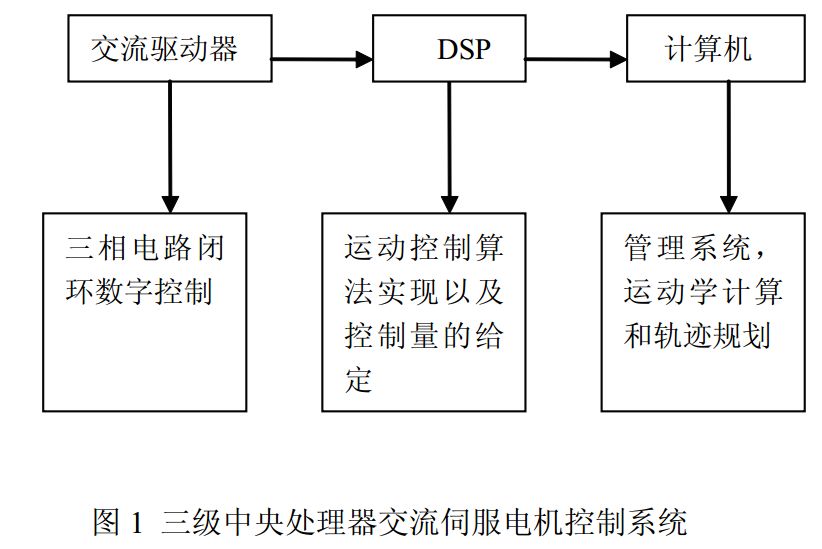
本文討論的交流伺服電機模型采用了三級中央處理器進行控制。三級的中央處
理器控制具體包括:(1)第一級中央處理器,這一層是通過交流驅動器來實現交流伺服電機的U/V/W三相電路閉環數字控制,這也是基礎層的控制;(2)第二級中央處理器,這一層是通過D SP來完成交流伺服電機的運動控制算法實現以及控制量的給定,這也是本文討論的核心;(3)第三層中央處理器,這一層是通過計算機來管理整個系統,并且進行運動學計算和軌跡的規劃。詳情見圖1。
三、 雙模控制算法
模糊PD結合單神經元自適應PID的雙模控制算法相較于一般的控制算法具有很強的優勢。首先,模糊P D有較強的魯棒性,在運動控制的適用中的表現優于其他的控制方式。一般的,為了能夠確保交流伺服電機的控制實時性,都會先將連續的控制器輸入量進行離散化,而在線控制時則通過系統查表的方式得出需要的控制量,在這個過程中使用模糊控制會對控制精度帶來消極的影響。而單神經元控制則能控制精度,但是在輸入量變化范圍較大的時候,調整的速度會變慢。因此,結合兩種控制算法的優點的雙模控制算法具有很強的適用優勢。
為了將模糊P D與單神經元合理的結合起來,
四、 FCMAC控制算法在交流伺服電機控
制中的運用小腦模型關節控制器(C M C A),是由J.S.Albus于1975年提出的。CMCA是一種典型的局部逼近神經網絡,是對人類小腦活動的一種模擬,由于CMCA具有線性結構以及算法簡單等特點,其應用范圍非常廣泛。本文
提到的FCMCA就是其中的一種,FCMCA,即模糊小腦模型關節控制器,它與BP網絡之類的全局逼近算法相比,學習的速度更快,也更適合于在線學習,到目前為止,已經成功的用于許多領域。
伺服系統向著全數字化的方向發展,而高性能DSP器件的出現為其奠定了堅實的基礎。從國內外最新的發展情況來看,國外很多公司都已推出了基于D SP的成型的全數字交流伺服產品,象國內引進較多的日本松下、安川等交流伺服系統。目前,國內的控制界也己掀起了利用DSP來實現交流伺服系統的熱潮。另外,采用高性能控制策略的控制系統具有很好自適應能力和抗干擾能力,能夠在參數時變及干擾等惡劣的工況下保證系統良好的動態和穩態性能。克服了基于常規控制理論設計的電機控制系統存在的缺陷和不足。本文的主要任務是設計一種基于DSP和CAN總線技術的高性能全數字化伺服系統。采用電流、轉速雙閉環控制方式對永磁同步電動機進行速度和位置控制。
審核編輯:郭婷
-
dsp
+關注
關注
554文章
8059瀏覽量
350418 -
控制系統
+關注
關注
41文章
6658瀏覽量
110886 -
伺服電機
+關注
關注
85文章
2057瀏覽量
58190
原文標題:基于DSP的交流伺服電機(PID算法與模糊PD相結合、FCMAC算法)控制
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論