 一種FLL輔助PLL的GNSS接收機矢量跟蹤環路
一種FLL輔助PLL的GNSS接收機矢量跟蹤環路
摘要:全球導航衛星系統(GNSS)接收機的設計主要包括捕獲、跟蹤、解算三個環節,其中,跟蹤環節中載波頻率和碼頻率的穩定性直接影響著導航定位性能。為改善動態環境中載波頻率和碼頻率的波動性,提高定位精度,提出一種頻率鎖定環路(FLL)輔助相位鎖定環路(PLL)的 GNSS 矢量跟蹤環路結構。在載波環中,采用二階 FLL 輔助三階 PLL 的跟蹤方法,通過預測載波相位、載波頻率、載波頻率率,更新載波相位值并反饋到載波 NCO,實現載波穩定跟蹤;在碼環中,將解算環節獲取的偽距信息反饋到跟蹤環節,實時更新各跟蹤通道的碼頻率,實現碼環穩定跟蹤。實驗結果表明,相較于傳統的標量跟蹤方法,所提出的 FLL 輔助 PLL 的矢量跟蹤方法能夠在動態環境下輸出較小的載波頻率和碼頻率誤差,且具有更高的定位精度。相較于其他的環路改進算法,該方法融合了載波改進技術與矢量跟蹤技術,且利用真實衛星數據驗證了所提方法的定位效果。
0 引 言
全 球 導 航 衛 星 系 統(Global Navigation SatelliteSystem,GNSS)已廣泛應用于軍事和民用領域,成為最受用戶歡迎的導航方法之一。GNSS接收機設計主要包括捕獲、跟蹤、解算三個環節,跟蹤環節逐步精細估計載波頻率和碼相位值,獲取偽距、偽距率信息,在解算環節結合衛星位置解算出接收機位置、速度、時間信息。傳統的 GNSS 跟蹤環路是借助載波跟蹤環路(簡稱載波環)和碼跟蹤環路(簡稱碼環)完成的,其中碼環實現形式通常表現為延遲鎖定環路(DLL),而載波環通常有相位鎖定環路(PLL)和頻率鎖定環路(FLL)兩種。然而,動態環境中的 GNSS 環路跟蹤存在載波頻率和碼頻率波動問題,大幅度的頻率波動會影響跟蹤性能,從而直接影響導航定位效果。
GNSS 環路濾波器以比例積分濾波(PIF)為主[1?2],其利用載波相位差或載波頻率差,結合環路濾波參數及相干積分時間確定當前時刻最佳相位或頻率,從而完成環路跟蹤。GNSS環路跟蹤精度主要受熱噪聲和動態應力誤差兩部分因素影響,相較于 PLL,FLL 能更加魯棒地容忍用戶的動態應力,能跟蹤信噪比更低的信號,然而,FLL 輸出的載波相位測量值不夠精確,并且數據解調過程中發生的比特錯誤率更高[3?4]。綜合考慮到 PLL 與FLL 優缺點,文獻[5]將 FLL 與 PLL 結合起來,以 FLL 輔助 PLL 的方式估計載波頻率,經過穩定狀態下的功率譜分析、均值及方差比較,結果表明 FLL 輔助 PLL 的環路跟蹤方式能在環路噪聲與載體動態性之間做出平衡,從而優化環路跟蹤性能。但缺點是載體運動參數需要根據接收機所處環境的信噪比、動態應力情況預先調整,這制約了該環路結構在實時場景下的應用。為了充分利用跟蹤環節中的環路狀態量,更具有普遍適應性的矢量跟蹤(Vector Tracking,VT)[6]被提出。
不同于傳統的標量跟蹤,VT 結構將 GNSS跟蹤環節和解算環節緊密相連,利用載波頻率差、碼相位差,計算偽距差、偽距率差,通過導航濾波更新導航結果,并將導航結果送入跟蹤環路,實現所有通道之間的信息共享。矢量跟蹤結構自提出以來,經過不斷發展,文獻[7]以 VT為基礎,將載波環輸出的多普勒頻移信息和碼環輸出的碼相位信息送入導航濾波器進行導航解算,并利用解算環節的偽距信息實時更新碼頻率,輔助環路跟蹤。但其載波環 路 實 現 形 式 仍 然 是 單 一 的 PIF 環 路 ,動 態 環 境 中GNSS 載波相位或頻率測量值精度低,易造成環路失鎖并影響定位結果。
為改善動態環境中載波頻率和碼頻率的波動問題,提高定位精度,本文提出一種 FLL 輔助 PLL 的 GNSS 矢量跟蹤結構。首先確定導航跟蹤與導航解算的系統模型,包括 FLL 輔助 PLL 的載波跟蹤環路結構設計、矢量碼環結構設計和導航解算部分的卡爾曼濾波(KF)狀態模型和量測模型。實驗結果表明,相較于傳統的標量跟蹤方法,本文所提出的 FLL 輔助 PLL 的矢量跟蹤方法能夠在動態環境下輸出較小的載波頻率和碼頻率誤差,且具有更高的定位精度。
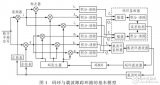
1 標量跟蹤結構
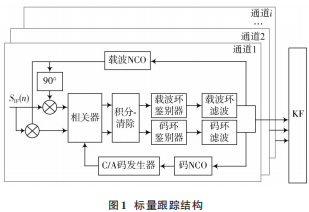
傳統的標量跟蹤結構如圖 1 所示。接收的射頻信號經過降頻量化后,轉化為數字中頻信號 SIF ( n )。每個通道的數字中頻信號首先與本地載波振蕩器復制的載波信號(包括同相支路 I 和反相支路 Q)進行混頻,然后與本地碼發生器復制的超前(Early)、即時(Prompt)、滯后(Late)碼信號進行相關,經積分?清除后得到相干積分結果。環路鑒別器根據 6 個相干積分結果可以估算出載波相位差和碼相位差,并由環路濾波后作為載波數控振蕩器(NCO)和碼 NCO 的控制輸入。標量跟蹤結構的碼環為 DLL,載波環為 PLL 或 FLL。如圖 1 所示,每個跟蹤通道之間相互獨立,偽距差、偽距率差被送入導航解算部分,通過 KF實現導航信息解算[8]。
2 矢量跟蹤結構
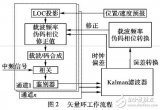
本文提出的FLL輔助PLL的矢量跟蹤結構如圖2所示。
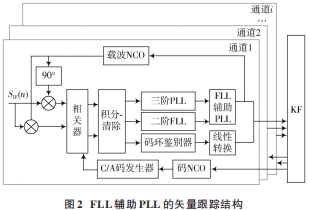
載波環部分通過 FLL 輔助 PLL 的形式更新載波相位值,控制載波 NCO 的輸入從而保持環路鎖定。其中,PLL 采用三階環路濾波,FLL 采用二階環路濾波。碼環矢量結構以 KF 為導航處理器,將導航解算部分的偽距信息反饋到碼 NCO,調整各跟蹤通道的碼頻率,以此跟蹤 GPS 偽碼信號并實現所有通道的信息共享。對于導航濾波器,除碼環輸出的碼相位信息外,載波環濾波輸出的多普勒頻移信息也送入 KF 中,計算接收機位置、速度、時間信息。
2.1 載波環結構設計
載波環結構設計包括三階 PLL 設計、二階 FLL 設計和 FLL輔助 PLL設計共三部分。PLL和 FLL設計均采用PIF 形式,分別更新環路狀態量,最后通過線性組合獲得載波相位值從而控制載波 NCO 輸入。
2.1.1 三階 PLL設計
PLL 是以鎖定輸入信號載波相位為目標的一種載波環實現方式。基于 PIF 的三階 PLL 通過預測載波相位、載波角頻率和載波角頻率率(載波角頻率的變化率)實現載波信號的跟蹤鎖定。
載波相位鑒別器鑒別 k時刻的載波相位差[9?10]Δθk:

式中:IP, k 和 QP, k 分別表示 k 時刻即時同相支路和正交支路的相干積分值。
三階 PLL 結合當前時刻的狀態量 xk,計算下一時刻的狀態量[1]xk + 1:
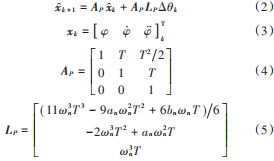
式中:xk 表示環路狀態量,它包括載波相位 φ、載波角頻率 φ? 和載波角頻率率 φ;T 為相鄰時刻時間間隔;ωn 為環路特征頻率;an , bn為濾波參數。
2.1.2 二階 FLL設計
FLL 是以鎖定輸入信號載波頻率為目標的一種載波環實現方式。基于 PIF 的二階 FLL 通過預測載波頻率和載波頻率率(載波頻率的變化率)實現載波信號的跟蹤鎖定。
載波頻率鑒別器鑒別 k - 1 和 k 兩相鄰時刻的角頻率差 Δ?k:

二階 FLL 結合當前時刻的狀態量 xk,計算下一時刻的狀態量[1]xk + 1:
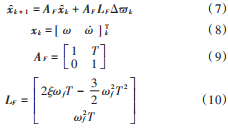
式中:xk 表示環路狀態量,它包括載波角頻率 ω 和載波角頻率率ω;ωf為環路特征頻率;ξ為阻尼系數。
2.1.3 FLL
輔助PLL設計k時刻三階 PLL參與反饋到載波 NCO 的值[11]為:

k時刻二階 FLL參與反饋到載波 NCO 的值[12]為:

通過線性組合,得到最終反饋到載波 NCO 的載波相位 θNCO, k為:

通過更新的載波相位值,反饋到載波 NCO 復制出本地載波信號,與輸入信號混頻實現載波穩定跟蹤。
2.2矢量跟蹤環設計
碼相位鑒別器鑒別接收碼和復制碼之間的碼相位差[13?14]Δτk:

式中:
碼相位差 Δτk經線性轉換得到偽距誤差 Δρ:

式中:fcode為衛星信號被發射時的碼頻率,其值為1.023MHz。
利用KF 計算當前時刻接收機的位置pr, k、接收機鐘差Δb,結合星歷解算出的衛星位置ps、衛星時鐘鐘差Δbs、電離層延時I、對流層延時 T、偽距量測噪聲量ερ,計算當前時刻的偽距值:

計算 k時刻的碼頻率 fcode, k值[7]:

通過更新的碼頻率反饋到碼 NCO,調整各跟蹤通道的碼頻率實現所有通道的信息共享。
2.3導航解算
為了計算接收機的位置、速度、時間信息,并對跟蹤過程與解算過程建立聯系,選取KF作為導航濾波器。KF包括狀態模型和量測模型兩部分,具體理論如下。
KF狀態量為:
狀態模型為:
狀態轉移矩陣 Φ 為:
式中 τ為 KF更新時間間隔。
量測量由跟蹤環路測得的偽距誤差 Δρ、偽距率誤差 Δρ? 構成。

KF的量測模型為:

其中:
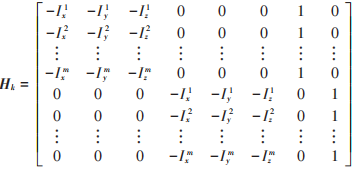
式中:1, 2,?, m 表示參與定位的衛星代號;[ I x ,I y ,Iz ]是衛星在接收機處的單位觀測矢量。
3 實驗和結果分析
3.1 實驗數據采集
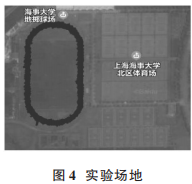
為了驗證所提出的 FLL 輔助 PLL 的矢量跟蹤結構相較于傳統的標量跟蹤結構有更好的跟蹤性能和定位性能,本文進行了動態實驗驗證。在本實驗中,中頻信號 采 集 器 采 集 GPS 的 L1 波 段 信 號 并 轉 換 為 頻 率 為3.996 MHz的中頻信號,采樣頻率為 16.369 MHz。實驗裝置如圖 3 所示,天線設備安裝在電瓶車車筐頂端,電源和中頻信號采集器在車筐內。實驗在上海海事大學擲球場跑道進行,實驗時長為 150 s,實驗場地如圖4所示。

3.2 實驗結果分析
根據所提出的 FLL 輔助 PLL 的矢量跟蹤環路結果進行實驗數據處理,分別對衛星信號的載波頻率、碼頻率和定位結果三個參量進行對比分析。
圖 5和圖 6給出了環路跟蹤的載波頻率和碼頻率對比結果,灰色點代表傳統的標量跟蹤結果,黑色點代表本文提出的 FLL輔助 PLL的矢量跟蹤結果。
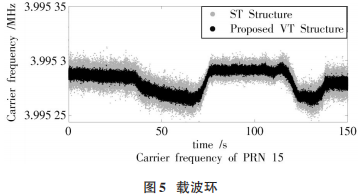
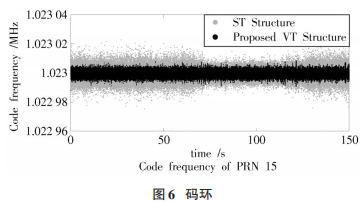
載波頻率標準差分別為 10.663 1 m,9.632 3 m;碼頻率標準差分別為4.011 1 m,1.8326m。從圖5、圖 6中可以看出,動態環境下所提出的FLL輔助PLL 的矢量跟蹤方法相較于傳統標量跟蹤方法具有更高的跟蹤精度,GNSS 跟蹤環路輸出的載波頻率和碼頻率波動性明顯更小。載波環精度提高是因為 FLL 輔助 PLL 的載波跟蹤方式可以更穩定地跟蹤載波信號。碼環精度提高是因為矢量跟蹤結構的碼頻率是通過導航解算部分的偽距信息預測的,相較于傳統的標量跟蹤精度更高。標準差計算公式為:

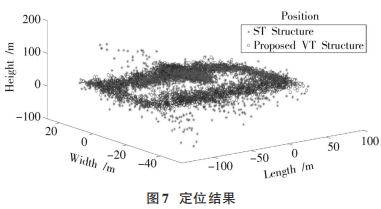
圖 7 對比了兩種方法的定位結果,星形標號代表傳統的標量跟蹤方法輸出的定位結果,小圓圈代表本文提出的 FLL 輔助 PLL 的矢量跟蹤方法輸出的定位結果。運動過程中,前者的球概率誤差(SEP)為 51.637 3 m,后者的 SEP 為 3.372 6 m。從圖 7中可以看出,使用傳統的標量跟蹤方法解算出的定位結果較為分散,定位結果甚至分布在擲球場中央,部分結果的高度也不正確,而采用 FLL輔助 PLL的矢量跟蹤方法所得的定位結果軌跡效果明顯更好,定位精度更高。SEP計算公式為:

式中:σx 為東向標準差;σy 為北向標準差;σz 為天向標準差。
4 結 論
本文提出了一種 FLL 輔助 PLL 的矢量跟蹤方法,并通過實驗驗證了該方法的跟蹤及定位性能。分別對所提出方法與傳統方法的載波跟蹤頻率、碼頻率、定位結果三個參量進行對比分析。實驗結果表明,相較于傳統的標量跟蹤方法,本文提出的 FLL 輔助 PLL 的矢量跟蹤方法能夠在動態環境下輸出較小的載波頻率和碼頻率誤差,且具有更高的定位精度。
審核編輯:湯梓紅
-
接收機
+關注
關注
8文章
1184瀏覽量
53631 -
pll
+關注
關注
6文章
781瀏覽量
135330 -
GNSS
+關注
關注
9文章
789瀏覽量
48138 -
導航衛星系統
+關注
關注
0文章
10瀏覽量
3017
原文標題:論文速覽 | 一種 FLL 輔助 PLL 的 GNSS接收機矢量跟蹤環路
文章出處:【微信號:現代電子技術,微信公眾號:現代電子技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于數字基帶芯片的高靈敏度接收機跟蹤環路設計
GPS軟件接收機跟蹤環路設計
基于SoC的星載微型GNSS接收機設計
碼環與載波環路鑒相、鑒頻原理
一種基于FPGA的時鐘跟蹤環路的設計與實現

針對GPS接收機中載波跟蹤環路的設計與研究
GNSS接收機維護保養方法


大壩安全監測GNSS接收機:保障水庫安全






 工商網監
工商網監
評論