") 什么是編碼器呢?如何測(cè)量旋轉(zhuǎn)量和旋轉(zhuǎn)速度?
什么是編碼器呢?如何測(cè)量旋轉(zhuǎn)量和旋轉(zhuǎn)速度?
如何測(cè)量旋轉(zhuǎn)量和旋轉(zhuǎn)速度?
在我們的日常生活中,周?chē)懈鞣N精密儀器和電子設(shè)備。比如家用電器,工業(yè)機(jī)器人以及其他一些機(jī)器,這些設(shè)備的基本配置如下。
檢測(cè)設(shè)備運(yùn)動(dòng)狀態(tài)的傳感器;
控制器根據(jù)傳感器的信號(hào)進(jìn)行判斷和處理;
根據(jù)控制器處理的信息移動(dòng)設(shè)備的執(zhí)行器;
為了快速,準(zhǔn)確地控制這些設(shè)備,必須檢測(cè)設(shè)備的運(yùn)動(dòng)狀態(tài)。因此,使用稱(chēng)為編碼器的傳感器來(lái)檢測(cè)旋轉(zhuǎn)角度,移動(dòng)距離和旋轉(zhuǎn)/移動(dòng)速度。
那么什么是編碼器呢?
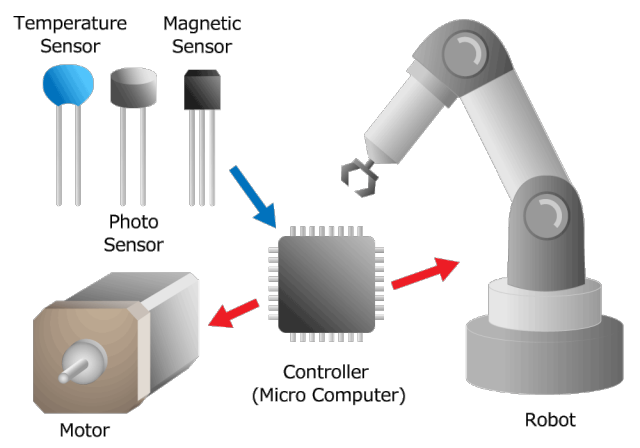
圖1.傳感器對(duì)于移動(dòng)和控制各種物體至關(guān)重要。
什么是編碼器?
編碼器是對(duì)旋轉(zhuǎn)角度和線性位移進(jìn)行編碼的傳感器。
檢測(cè)旋轉(zhuǎn)的編碼器稱(chēng)為 旋轉(zhuǎn)編碼器 ,檢測(cè)線性位移的編碼器稱(chēng)為 線性編碼器 。
實(shí)際上,因?yàn)樵诖蠖鄶?shù)情況下使用旋轉(zhuǎn)類(lèi)型,所以當(dāng)人們只說(shuō)編碼器時(shí),它通常指的是旋轉(zhuǎn)編碼器。在本文中,我們將主要著眼于旋轉(zhuǎn)編碼器。
編碼器應(yīng)用場(chǎng)景
正如開(kāi)頭所述,編碼器用于需要高精度且快速運(yùn)行的設(shè)備中。
一般來(lái)說(shuō),它是由電動(dòng)機(jī)驅(qū)動(dòng)的設(shè)備。例如,編碼器廣泛用于工廠中使用的工業(yè)機(jī)器人,例如組裝機(jī)器人,焊接機(jī)器人,自動(dòng)導(dǎo)向機(jī)和加工中心。
但是,大多數(shù)人從未見(jiàn)過(guò)工業(yè)機(jī)器人一直在工作的最新工廠。讓我們來(lái)看一些實(shí)際使用編碼器的情況。
工業(yè)自動(dòng)化
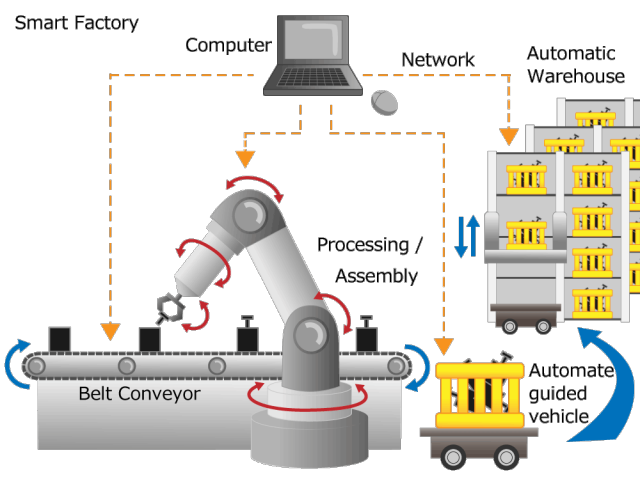
圖2.工廠自動(dòng)化(智能工廠)
在生產(chǎn)電器和汽車(chē)的工廠中使用了各種生產(chǎn)設(shè)備。
一臺(tái)計(jì)算機(jī)控制由金屬制成零件的機(jī)床,而一臺(tái)機(jī)床可以完成諸如切割平面,鉆孔和切槽之類(lèi)的各種操作。
這種機(jī)床稱(chēng)為加工中心。生產(chǎn)的零件被送到組裝工廠,并由工業(yè)機(jī)器人(例如專(zhuān)用組裝機(jī)或手臂式機(jī)器人)自動(dòng)組裝。
最新的工廠是完全自動(dòng)化的,并使用計(jì)算機(jī)和網(wǎng)絡(luò)進(jìn)行設(shè)計(jì),零件加工,存儲(chǔ),管理,運(yùn)輸和裝配的所有制造過(guò)程。“連接工廠”的概念稱(chēng)為工業(yè)4.0,此類(lèi)工廠稱(chēng)為智能工廠。
工業(yè)機(jī)器人
工業(yè)機(jī)器人使人類(lèi)擺脫了艱巨的工作,提高了工廠的生產(chǎn)率,并穩(wěn)定了產(chǎn)品質(zhì)量。
使用最廣泛且實(shí)用性最高的工業(yè)機(jī)器人是具有多個(gè)關(guān)節(jié)的關(guān)節(jié)機(jī)器人,相當(dāng)于人類(lèi)的肩膀,肘部和手腕。
它的工作原理類(lèi)似于具有旋轉(zhuǎn)和滑動(dòng)運(yùn)動(dòng)的人的手臂。控制器輸入的信號(hào)通過(guò)執(zhí)行器轉(zhuǎn)換為運(yùn)動(dòng),從而使機(jī)器人精確移動(dòng)。
從人的肩膀到手腕的與“手臂”相對(duì)應(yīng)的部分稱(chēng)為操縱器,從人的手腕到手指的與“手”相對(duì)應(yīng)的部分稱(chēng)為末端執(zhí)行器。
在工業(yè)機(jī)器人中,通過(guò)更換末端執(zhí)行器,不僅可以抓握,還可以進(jìn)行涂漆和焊接。如果您參觀機(jī)器人或機(jī)床展覽會(huì),您實(shí)際上可以看到各種公司展出的機(jī)器人。
圖3.工業(yè)機(jī)器人圖
執(zhí)行器
電動(dòng)機(jī)被用作機(jī)器人執(zhí)行器是因?yàn)樗鼈円子谛⌒突⑶揖哂懈呔取?/p>
在實(shí)際情況中,人們通過(guò)將減速齒輪與電動(dòng)機(jī)的輸出軸集成到電動(dòng)機(jī)的輸出軸上并降低電動(dòng)機(jī)的轉(zhuǎn)速來(lái)使用具有增大的旋轉(zhuǎn)力(轉(zhuǎn)矩)的制動(dòng)器。
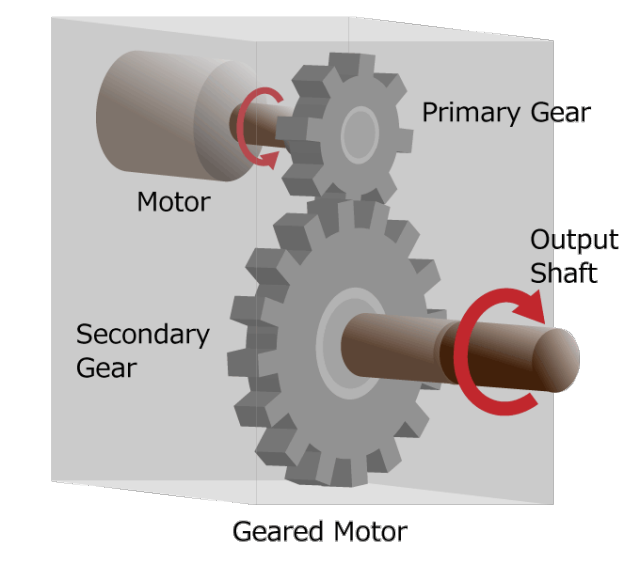
圖4A 減速電機(jī)圖
還有一種電動(dòng)滑動(dòng)器,其通過(guò)利用螺釘將運(yùn)動(dòng)從旋轉(zhuǎn)改變?yōu)榫€性而在運(yùn)動(dòng)方向上產(chǎn)生很大的力。正如下圖所示;
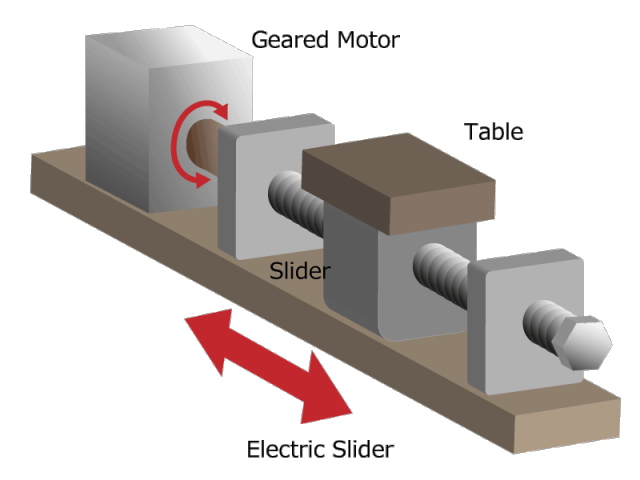
圖4B 電動(dòng)滑塊圖
伺服電機(jī)
電機(jī)的種類(lèi)繁多,在本文中,我們將重點(diǎn)介紹使用編碼器的電機(jī)。
一個(gè)例子是伺服電機(jī)。伺服電機(jī)是伺服機(jī)構(gòu)中使用的電動(dòng)機(jī)。
伺服機(jī)構(gòu)是使連續(xù)旋轉(zhuǎn)運(yùn)動(dòng)或線性運(yùn)動(dòng)的速度保持恒定,或者精確控制一個(gè)運(yùn)動(dòng)的旋轉(zhuǎn)角度和移動(dòng)距離的機(jī)制。
伺服電機(jī)由無(wú)刷直流或交流電機(jī),編碼器和驅(qū)動(dòng)器組成。
為了使無(wú)刷直流電動(dòng)機(jī)或交流電動(dòng)機(jī)的轉(zhuǎn)速保持恒定,編碼器檢測(cè)轉(zhuǎn)速。
如果檢測(cè)到的速度比設(shè)定的旋轉(zhuǎn)速度慢,則伺服放大器控制使電動(dòng)機(jī)旋轉(zhuǎn)更快;
如果檢測(cè)到的速度小于設(shè)定的旋轉(zhuǎn)速度,則伺服放大器進(jìn)行控制。
為了精確地控制電動(dòng)機(jī)的旋轉(zhuǎn)角,編碼器檢測(cè)旋轉(zhuǎn)角。伺服放大器通過(guò)檢查電動(dòng)機(jī)是否已移動(dòng)到目標(biāo)旋轉(zhuǎn)角來(lái)控制電動(dòng)機(jī)的旋轉(zhuǎn)角。
這種通過(guò)使用編碼器檢測(cè)電機(jī)轉(zhuǎn)速和旋轉(zhuǎn)角度的控制方法稱(chēng)為 反饋控制(閉環(huán)) 。
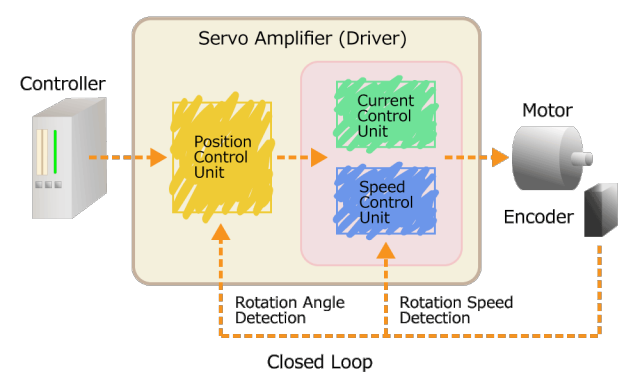
圖5 伺服電動(dòng)機(jī)圖
步進(jìn)電機(jī)
步進(jìn)電機(jī)是輸入相應(yīng)脈沖信號(hào)時(shí)可以旋轉(zhuǎn)一定角度的電機(jī)。
步進(jìn)電機(jī)可以不帶反饋(開(kāi)環(huán))使用,因?yàn)樾D(zhuǎn)角度和旋轉(zhuǎn)速度取決于施加到電機(jī)的脈沖信號(hào)的數(shù)量以及脈沖之間的間隔。
由于該方法不使用編碼器,因此系統(tǒng)比較簡(jiǎn)單。但是,步進(jìn)電動(dòng)機(jī)運(yùn)行效率會(huì)大大降低。因?yàn)樗偸且宰畲箅娏鬟\(yùn)行以防止失步。
如果通過(guò)使用編碼器檢查其是否按照指令旋轉(zhuǎn)并反饋結(jié)果,就不必保持最大電流,從而降低了系統(tǒng)的功耗。
此外,通過(guò)使用編碼器檢查負(fù)載狀態(tài), 可以在不失步的范圍內(nèi)使執(zhí)行器的運(yùn)行速度最大化 。這將提高生產(chǎn)率。有時(shí)人們稱(chēng)這種方式使用的電機(jī)為步進(jìn)伺服電機(jī)。
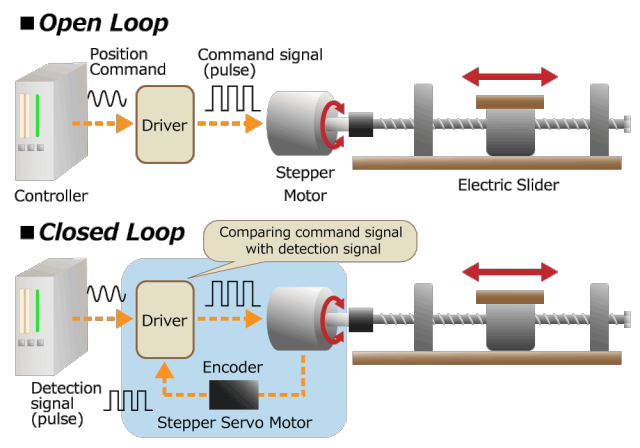
圖6 步進(jìn)電機(jī)的使用
檢測(cè)旋轉(zhuǎn)和角度的機(jī)制是什么?
圖7 將旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換為旋轉(zhuǎn)信息的過(guò)程
前面,我們提到編碼器是一種檢測(cè)旋轉(zhuǎn)角度,線性位移和速度的傳感器。
傳感器是檢測(cè)自然現(xiàn)象變化的元件或電子組件。
例如,光學(xué)傳感器檢測(cè)光的開(kāi)/關(guān),而磁傳感器檢測(cè)磁場(chǎng)的分布。
傳感器具有以下作用:通過(guò)將檢測(cè)到的物理量變化作為 電信號(hào)輸出 ,并且可以將信息發(fā)送到外部。如上圖所示,編碼器從傳感器元件輸出的電信號(hào),最后將旋轉(zhuǎn)/角度信息作為數(shù)字或模擬電信號(hào)發(fā)送到外部。
旋轉(zhuǎn)時(shí)什么物理量會(huì)變化?
待測(cè)物理量的差異意味著傳感器檢測(cè)方法的差異,因此它是決定編碼器優(yōu)缺點(diǎn)的重要組成部分。
根據(jù)檢測(cè)方法,編碼器分為以下四種類(lèi)型: 機(jī)械 , 光學(xué) ,磁性和電磁感應(yīng)類(lèi)型。
機(jī)械式(接觸式)
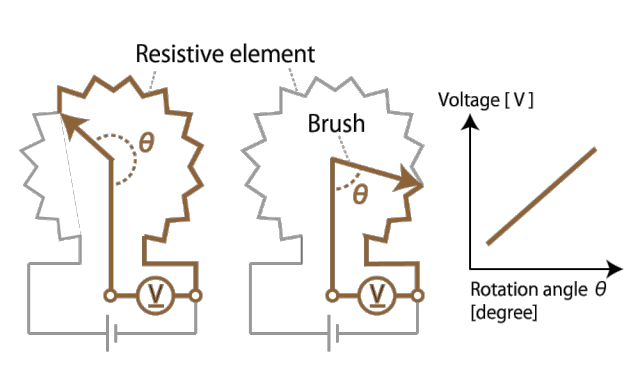
圖8 機(jī)械(接觸式)編碼器圖
該方法利用可變電阻器檢測(cè)旋轉(zhuǎn)位置,該可變電阻器的電阻與旋轉(zhuǎn)角度成比例地變化。這種機(jī)械編碼器通常稱(chēng)為 電位器 。
當(dāng)滑塊在電阻上移動(dòng)時(shí),電位計(jì)的電阻值將與滑塊的移動(dòng)距離成比例地變化。
光學(xué)型
這是一種使用光電傳感器檢測(cè)光是否通過(guò)安裝在電機(jī)軸上旋轉(zhuǎn)的碼盤(pán)的徑向上的縫隙的方法。
光脈沖信號(hào)通過(guò)狹縫時(shí)會(huì)發(fā)生變化,并且可以通過(guò)對(duì)脈沖數(shù)進(jìn)行計(jì)數(shù)來(lái)檢測(cè)電機(jī)軸的旋轉(zhuǎn)量。
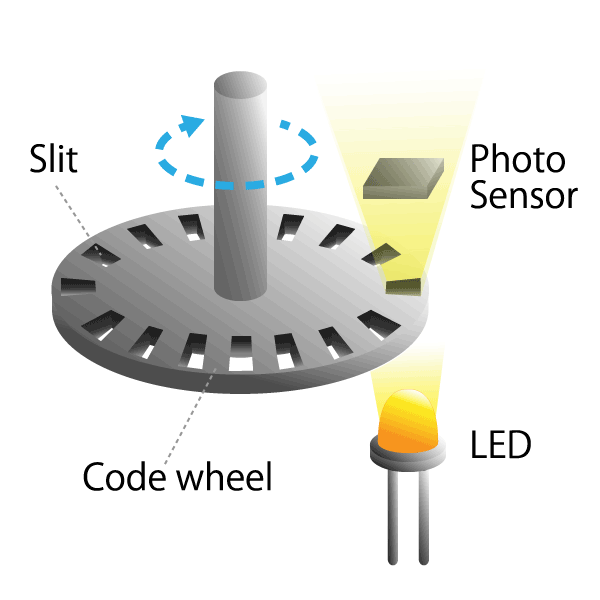
圖9 光學(xué)編碼器圖
電磁式
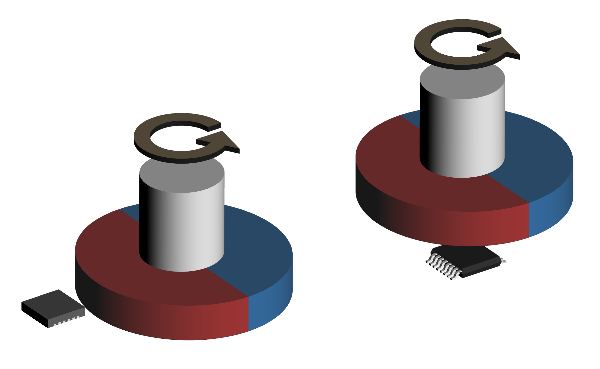
圖10 磁性編碼器圖
該方法使用磁傳感器來(lái)測(cè)量由安裝在電機(jī)軸上的永磁體產(chǎn)生的磁場(chǎng)分布的變化。
電動(dòng)機(jī)旋轉(zhuǎn)時(shí),永磁體的磁場(chǎng)分布也會(huì)發(fā)生變化,因此,如果使用磁傳感器檢測(cè)到它,則可以確定電動(dòng)機(jī)軸的旋轉(zhuǎn)位置。
電磁感應(yīng)式
該方法讀取安裝在電機(jī)軸上的感應(yīng)線圈(勵(lì)磁線圈)和固定線圈(檢測(cè)線圈)之間產(chǎn)生的磁場(chǎng)變化。
基本原理與使用電磁感應(yīng)的變壓器相同,這種編碼器稱(chēng)為旋轉(zhuǎn)變壓器。由于使用電刷的接觸方法,旋轉(zhuǎn)變壓器旋轉(zhuǎn)感應(yīng)線圈的電源存在磨損的風(fēng)險(xiǎn)。但是,有一個(gè)VR(可變電抗)解析器可以改善這種風(fēng)險(xiǎn)。
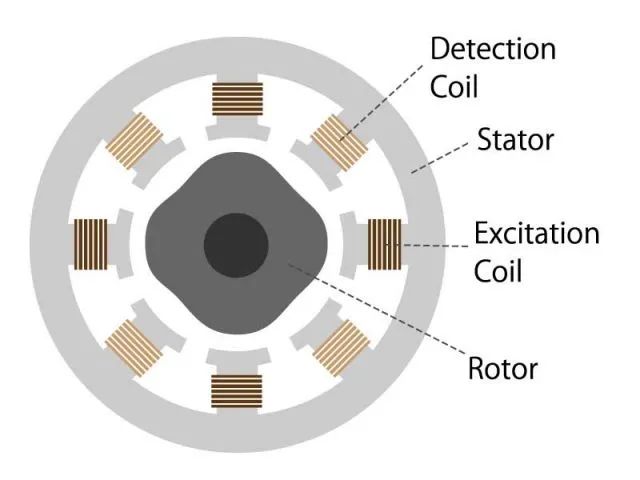
圖11 電磁感應(yīng)編碼器圖
有哪些類(lèi)型的旋轉(zhuǎn)和角度信息?
旋轉(zhuǎn)狀態(tài)是什么?以電機(jī)為例,它停止運(yùn)轉(zhuǎn),順時(shí)針旋轉(zhuǎn),逆時(shí)針旋轉(zhuǎn),以恒定速度旋轉(zhuǎn),加速,減速等等。
準(zhǔn)確掌握這些條件并準(zhǔn)確控制電機(jī)需要四種信息:旋轉(zhuǎn)量,旋轉(zhuǎn)速度,旋轉(zhuǎn)方向和旋轉(zhuǎn)位置。
旋轉(zhuǎn)角度
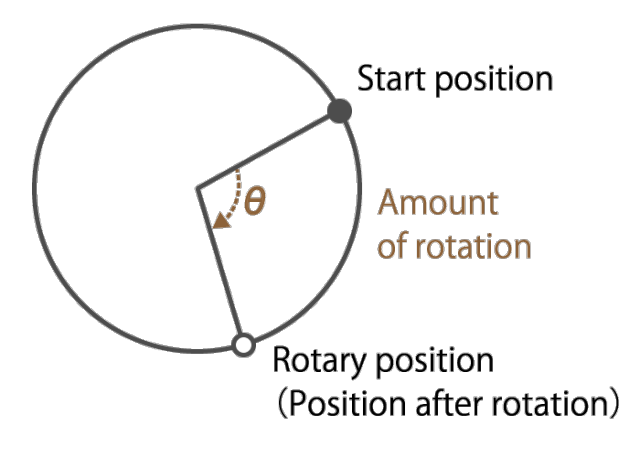
圖12 旋轉(zhuǎn)量說(shuō)明
這是有關(guān)電動(dòng)機(jī)軸角已移動(dòng)多少次的信息。
例如,在無(wú)刷直流電動(dòng)機(jī)中,可以通過(guò)檢測(cè)轉(zhuǎn)子的磁極的變化來(lái)知道轉(zhuǎn)子的旋轉(zhuǎn)量,并有效地使電動(dòng)機(jī)旋轉(zhuǎn)。
轉(zhuǎn)速
這是有關(guān)電機(jī)軸旋轉(zhuǎn)速度的信息。
正如我們前面提到的,伺服電動(dòng)機(jī)檢測(cè)無(wú)刷直流電動(dòng)機(jī)或交流電動(dòng)機(jī)的轉(zhuǎn)速,并執(zhí)行反饋控制,以使電動(dòng)機(jī)軸以伺服放大器設(shè)定的速度旋轉(zhuǎn)。
旋轉(zhuǎn)方向
這是有關(guān)電動(dòng)機(jī)軸旋轉(zhuǎn)方向(順時(shí)針或逆時(shí)針)的信息。
在通過(guò)從編碼器輸出的脈沖數(shù)檢測(cè)電動(dòng)機(jī)軸的旋轉(zhuǎn)量的系統(tǒng)中,如果無(wú)法識(shí)別旋轉(zhuǎn)方向,則錯(cuò)誤地對(duì)旋轉(zhuǎn)量進(jìn)行計(jì)數(shù)。
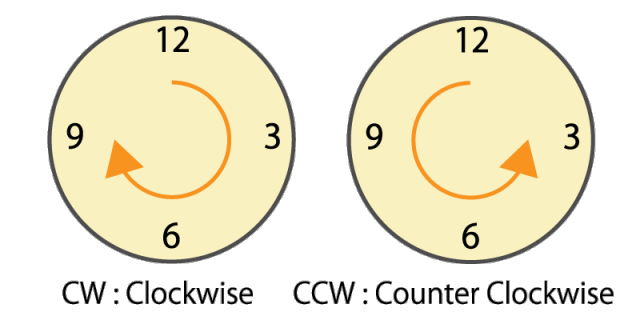
圖13 順時(shí)針和逆時(shí)針
旋轉(zhuǎn)位置
這是有關(guān)電機(jī)軸角度多少度的信息。
正如我們前面提到的,伺服電機(jī)和步進(jìn)伺服電機(jī)使用編碼器來(lái)檢測(cè)旋轉(zhuǎn)角度并執(zhí)行反饋控制,同時(shí)判斷是否已達(dá)到目標(biāo)旋轉(zhuǎn)角度。從而實(shí)現(xiàn)高精度的位置控制。
總結(jié)
本文簡(jiǎn)單介紹編碼器的相關(guān)概念,編碼器是檢測(cè)旋轉(zhuǎn)角度或線性位移的傳感器;用于需要高速,高精度運(yùn)行的設(shè)備中。通過(guò)檢測(cè)電動(dòng)機(jī)的轉(zhuǎn)速和旋轉(zhuǎn)角來(lái)控制電動(dòng)機(jī)的旋轉(zhuǎn)的方法稱(chēng)為反饋控制(閉環(huán)方法)。
編碼器分為四種類(lèi)型:機(jī)械,光學(xué),磁性和電磁感應(yīng)類(lèi)型。為了使電動(dòng)機(jī)高精度旋轉(zhuǎn),需要獲取系統(tǒng)四種信息:旋轉(zhuǎn)量,旋轉(zhuǎn)速度,旋轉(zhuǎn)方向和旋轉(zhuǎn)位置。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2553文章
51390瀏覽量
756572 -
控制器
+關(guān)注
關(guān)注
112文章
16445瀏覽量
179447 -
編碼器
+關(guān)注
關(guān)注
45文章
3667瀏覽量
135237 -
制動(dòng)器
+關(guān)注
關(guān)注
0文章
108瀏覽量
14460
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
旋轉(zhuǎn)編碼器是如何工作的?
如何去測(cè)量設(shè)備的旋轉(zhuǎn)量和旋轉(zhuǎn)速度呢
旋轉(zhuǎn)式編碼器,旋轉(zhuǎn)式編碼器是什么意思
omron旋轉(zhuǎn)編碼器概述

旋轉(zhuǎn)編碼器的作用及應(yīng)用
淺析旋轉(zhuǎn)編碼器的分類(lèi)與用途
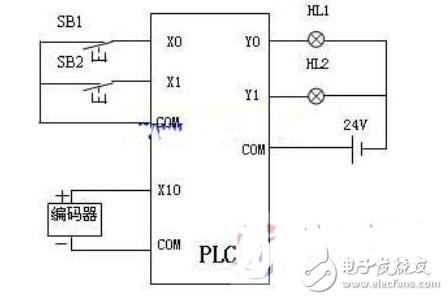
旋轉(zhuǎn)編碼器參數(shù)_旋轉(zhuǎn)編碼器與plc連接
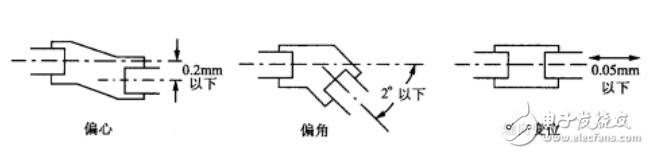
旋轉(zhuǎn)編碼器測(cè)量_旋轉(zhuǎn)編碼器安裝方式
旋轉(zhuǎn)編碼器拆卸方法_旋轉(zhuǎn)編碼器型號(hào)說(shuō)明
旋轉(zhuǎn)編碼器能直接換嗎_旋轉(zhuǎn)編碼器更換注意事項(xiàng)
旋轉(zhuǎn)編碼器的原理
旋轉(zhuǎn)編碼器的常見(jiàn)類(lèi)型
帶Arduino的旋轉(zhuǎn)編碼器設(shè)計(jì) 旋轉(zhuǎn)編碼器的工作原理和特點(diǎn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論