 開源激光雷達原型平臺
開源激光雷達原型平臺
作者:Istva?n Csomorta?ni,Dragos Bogdan,Cristian Orian, andAndrei Cozma
本文討論ADI公司新的廣闊市場LIDAR原型設計平臺,以及該平臺如何通過提供完整的硬件和軟件解決方案來幫助縮短客戶的產品開發時間,客戶可以使用該解決方案對其算法和定制硬件解決方案進行原型設計。它詳細介紹了模塊化硬件設計的細節,包括光接收和發射信號鏈、FPGA 接口和用于遠距離檢測的光學器件。解釋了所做的系統分區決策,有助于強調良好的系統設計、接口定義和適當模塊化級別的重要性。介紹了開源 LIDAR 軟件堆棧和特定于平臺的 API 的組件,展示了客戶如何在產品開發過程中從中受益,并將其集成到最終解決方案中。
介紹
隨著自動駕駛汽車和機器人不斷從科幻小說走向現實,汽車和工業客戶正在尋求新的環境感知解決方案,以使這些機器能夠自主導航。激光雷達是該領域發展最快的技術之一,隨著技術變得更加成熟和可靠,激光雷達正在得到更廣泛的采用,開辟了巨大的市場機會。由于許多初創公司和知名傳感器公司正在努力開發更精確、功耗更低、外形更小、更具成本效益的 LIDAR 傳感器,因此在系統硬件設計和實施軟件基礎設施以與系統中的所有組件進行通信時,它們都面臨著相同的挑戰。在這些領域,ADI可以通過硬件參考設計以及開源軟件堆棧帶來價值,使客戶能夠輕松地將ADI LIDAR產品組合中的IC以及軟件模塊和HDL IP集成到其產品中,從而縮短產品上市時間。
系統架構
隨著客戶開發其激光雷達傳感器,系統設計中幾乎沒有差異化領域:接收和發射光學器件、激光器的數量和方向、激光發射模式、激光束轉向和光接收元件的數量。但是,無論這些選擇如何,接收信號鏈和激光驅動信號要求都存在高度的共性。基于這些假設,ADI公司設計了模塊化LIDAR原型平臺AD-FMCLIDAR1-EBZ,旨在允許客戶使用自己的硬件輕松配置或替換設計部件,根據特定應用要求進行設計,但仍能夠將該平臺作為一個整體系統使用。該系統分為三個不同的板,具有標準化的數字和模擬接口:
數據采集 (DAQ) 板,包含高速 JESD204B ADC 以及相應的時鐘和電源。該板具有符合FMC標準的接口,可連接到用戶首選的FPGA開發板。它充當系統中的基板,通過數字連接器將其他兩個板連接到基板,數字連接器在這些板和FPGA之間路由控制和反饋信號,并通過同軸電纜傳輸模擬信號。
模擬前端 (AFE) 板,包含雪崩光電探測器 (APD) 光傳感器和調理 APD 輸出信號所需的整個信號鏈,以便將其饋送到 DAQ 板上的 ADC。
包含激光器和驅動電路的激光板。
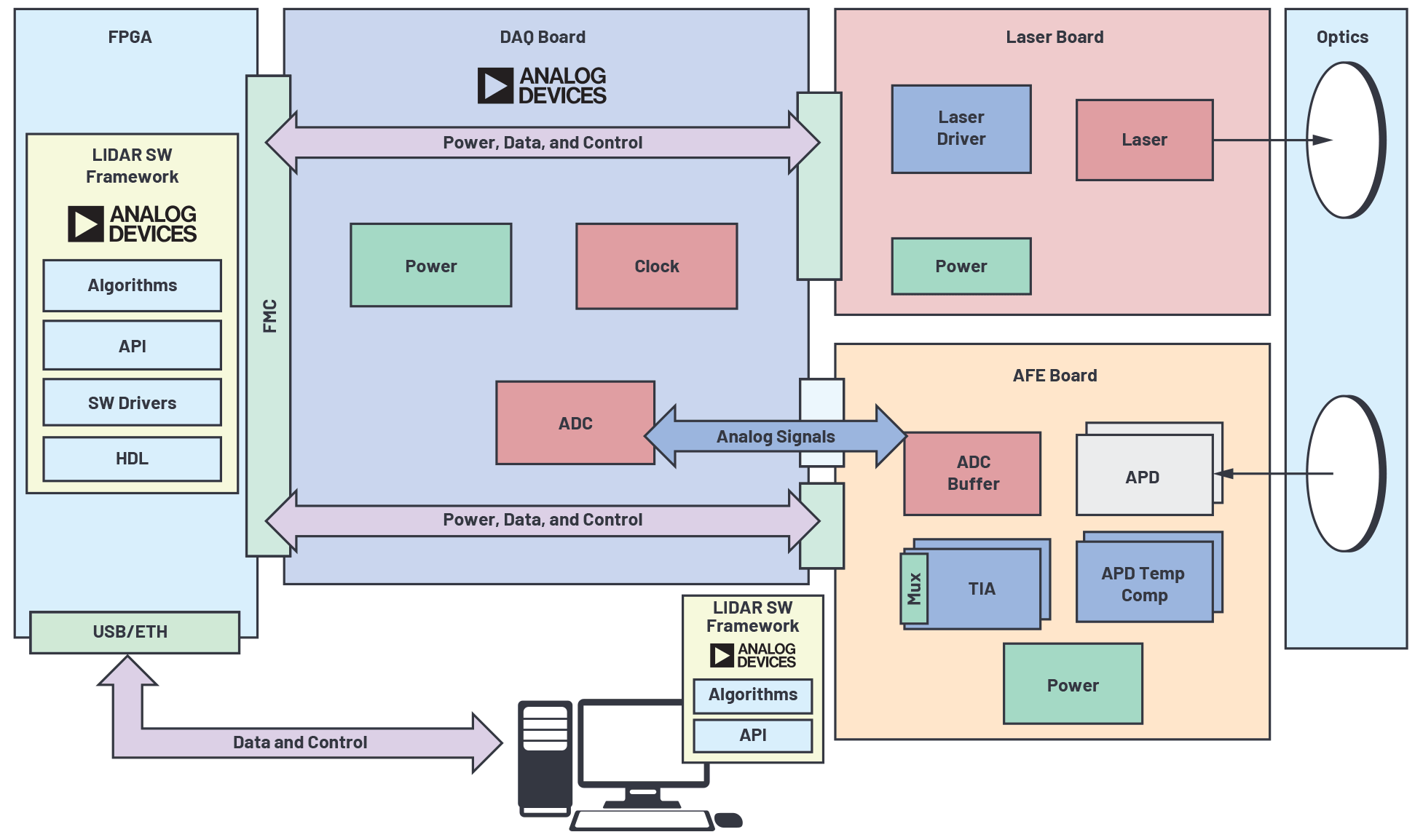
圖1.激光雷達平臺系統設計。
與往常一樣,在系統設計中,模塊化意味著靈活性,但它也存在諸如復雜性增加、性能下降和成本增加等缺點,在決定系統分區時必須對其進行全面評估。在本例中,系統被分解為這三塊板,原因如下:
無論模擬前端和所選激光解決方案的實現方式如何,ADC和時鐘都很可能保持不變。
模擬前端硬件設計和外形尺寸可能會發生變化,具體取決于所選的 APD、整體系統接收靈敏度和所選光學器件。
激光板的設計和外形尺寸也可能根據所選的照明解決方案和光學器件而發生變化。
系統必須在接收器和發射器的定位和定向方面提供很大的靈活性,以便它們彼此對齊或其他目標,這就是為什么柔性電纜用于數字信號和同軸電纜用于板之間的模擬信號的原因。
硬件設計附帶的軟件堆棧基于分層方法,其中幾層將其劃分為特定于操作系統的驅動程序和接口、特定于系統的 API 和應用程序層。這允許堆棧的上層保持不變,無論軟件是在嵌入式目標上運行,還是通過網絡或 USB 連接與系統通信的 PC。這在不同的產品開發階段非常有價值,如圖2所示,因為這意味著在原型設計階段開發的相同應用軟件,當系統連接到PC以方便開發時,可以很容易地部署到嵌入式生產系統上,而無需接觸低級接口。

圖2.產品開發周期。
硬件設計
LIDAR傳感器通過測量光脈沖到達目標并返回所需的時間來計算到目標的距離。時間以ADC采樣速率的增量測量,因為這決定了系統對接收到的光脈沖進行采樣的分辨率。公式1顯示了相對于ADC采樣速率的距離計算方式。

哪里:
LS是光速,3×108米/秒
fS 是 ADC 采樣速率
N 是自光脈沖生成到接收回來以來的 ADC 樣本數
假設系統中使用的AD9094 JESD204B四通道ADC的采樣速率為1 GHz,則每個采樣的結果對應于15 cm的距離。因此,系統中沒有任何采樣不確定性至關重要,因為即使是幾個樣本的不確定性也會導致較大的距離測量誤差。傳統上,LIDAR系統基于并行ADC,其固有的采樣不確定性為零。隨著接收通道數量的不斷增加以及功率和PCB尺寸要求變得更加嚴格,這些類型的ADC無法很好地擴展。另一種選擇是使用具有高速串行輸出的ADC,例如JESD204B,它解決了并行ADC存在的問題。此選項增加了數據接口的復雜性,使實現零采樣不確定性變得更加困難。
LIDAR DAQ板展示了如何為在子類1模式下運行的JESD204B數據采集系統設計電源、時鐘和數據接口,確保確定性延遲,從而實現零采樣不確定性,同時利用JESD204B接口提供的所有優勢,并為時鐘方案提供盡可能低的功耗,從而為這些挑戰提供解決方案。要在JESD204B子類1模式下工作,系統中總共需要五個時鐘:
ADC 采樣時鐘:驅動 ADC 信號采樣過程。
ADC 和 FPGA SYSREF:源同步、高壓擺率時序分辨率信號,負責復位器件時鐘分頻器,以確保確定性延遲。
FPGA全局時鐘(也稱為內核時鐘或器件時鐘):驅動JESD204B PHY層和FPGA邏輯的輸出。
FPGA參考時鐘:生成JESD204B收發器所需的PHY層內部時鐘;需要等于或設備時鐘的整數倍。
所有時鐘均由一個AD9528 JESD204B時鐘發生器產生,從而確保它們彼此同步。圖 3 顯示了時鐘方案以及與 FPGA 的數據接口。
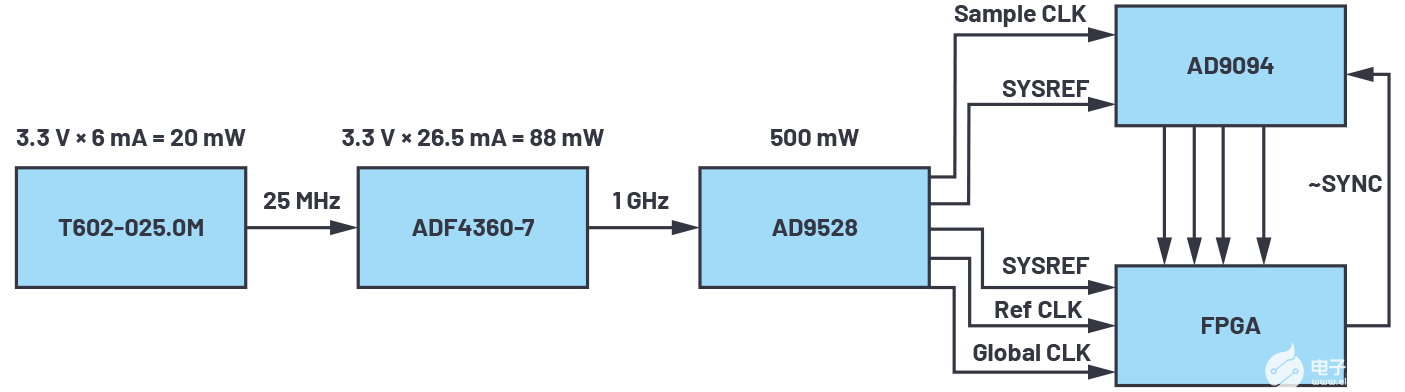
圖3.DAQ 板 時鐘 和 數據 路徑。
AFE板接收光反射信號,將其轉換為電信號,并將其傳輸到DAQ板上的ADC。該板可能是整個設計中最敏感的部分,因為它將信號條件電路與 16 通道 APD 陣列產生的微安電流信號混合在一起,將光信號轉換為電信號,以及為同一 APD 供電所需的 –120 V 至 –300 V 范圍內的高壓電源。16 個電流輸出通過一個內部 4:1 多路復用器饋入 4 個低噪聲、4 通道、跨阻放大器 (TIA) LTC6561s,以選擇隨后饋入 4 個 ADC 輸入之一的輸出通道。TIA的輸入部分需要大量關注,以實現所需的信號完整性和通道隔離水平,以便APD產生的極低電流信號不會增加額外的噪聲,從而最大限度地提高系統的SNR和目標檢測率。AFE 板的設計展示了實現最大信號質量的最佳實踐,方法是保持 APD 和 TIA 之間的走線長度盡可能短,在 TIA 輸入之間增加過孔以實現最大的通道間隔離,并定位信號條件電路,使其不會干擾板上的其他電源電路。另一個重要特性是能夠測量APD的溫度,以便能夠補償APD信號輸出的變化,因為APD的溫度在正常工作期間升高。提供幾個旋鈕來控制信號鏈的偏移和APD偏置(轉換為APD靈敏度),以便能夠最大化ADC輸入范圍以獲得最大SNR。圖4顯示了AFE板信號鏈的框圖。
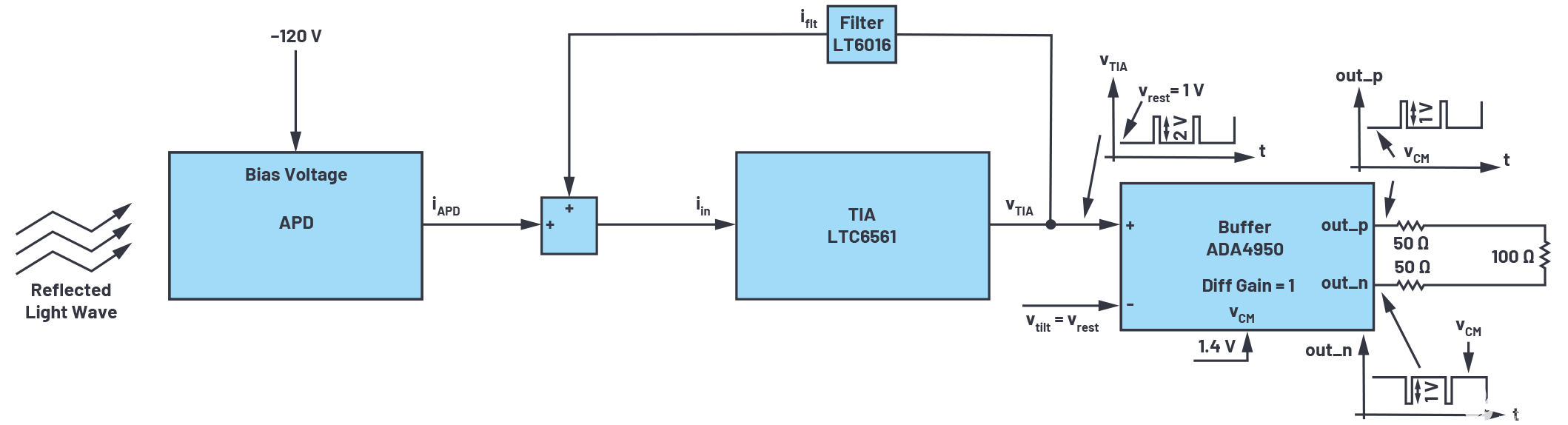
圖4.AFE 板信號鏈。
激光板產生波長為 905 nm 的光脈沖。它使用四個同時驅動的激光器來增加光束強度,從而延長測量范圍。FPGA載板產生的PWM信號具有可編程的脈沖寬度和頻率,用于控制激光器。信號在FPGA上以LVDS的形式生成,使其在通過DAQ板和連接DAQ和激光板的帶狀電纜從FPGA傳輸到激光板時不易受到噪聲的影響。驅動信號可以反饋到其中一個ADC通道,作為飛行時間參考。外部電源用于為激光器供電。該設計符合國際標準 IEC 60825-1:2014 和 IEC 60825-1:2007 的 1 類激光產品。
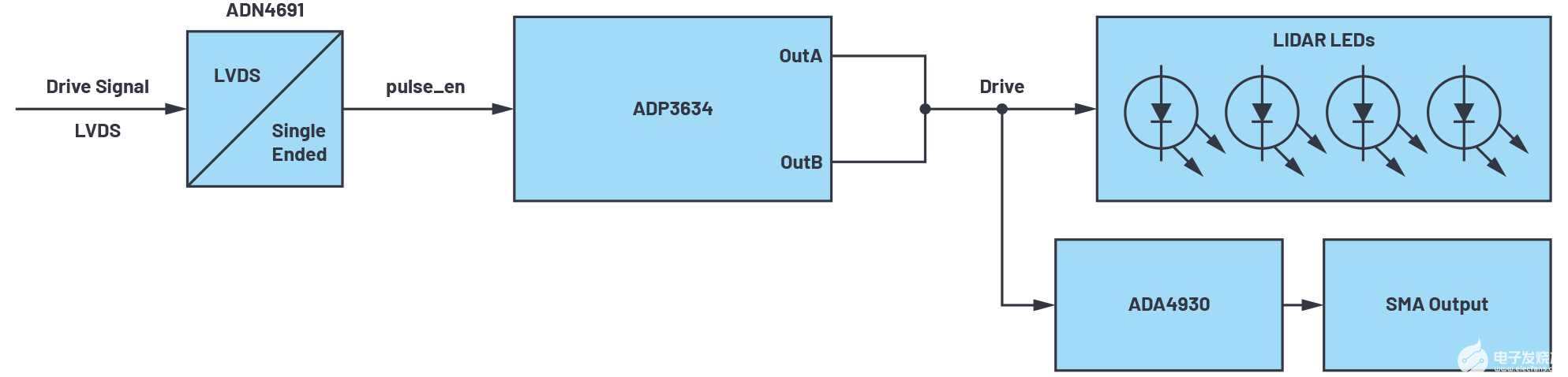
圖5.激光板信號鏈。
AFE 和激光板都需要光學器件才能進行長距離操作。該系統經證明可在使用快速軸準直器在 60 m 處運行1用于將垂直FoV縮小到1°同時保持水平視場不變的激光二極管,以及用于接收側的非球面透鏡。
高密度脂蛋白參考設計
HDL設計構成了硬件的主要接口,并實現了將數據從JESD鏈路傳輸到系統存儲器的所有邏輯,驅動激光器,同步接收器和發射器以實現精確的飛行時間測量,并實現與硬件設計中所有組件的通信接口。圖6顯示了HDL設計的簡化框圖。ADI公司HDL參考設計的通用架構使該框架具有可擴展性,并且更容易移植到另一個FPGA載波。該設計采用ADI公司的JESD204B框架2以及多個SPI和GPIO接口,用于從AD9094 ADC接收數據并控制原型平臺上的所有器件。
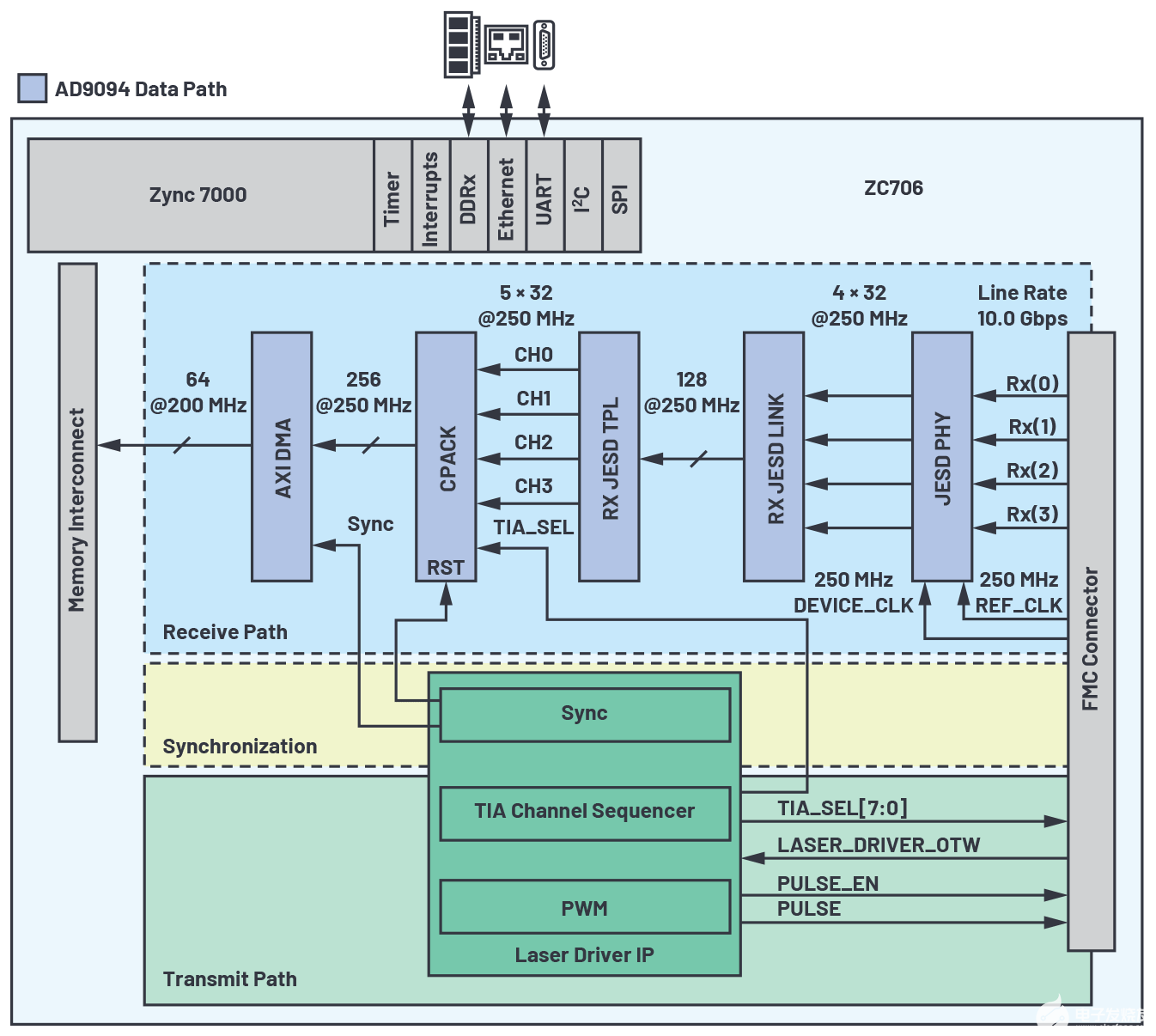
圖6.高密度脂蛋白設計框圖。
JESD204鏈路配置為支持四個數據轉換器(M),使用四個通道(L),通道速率為10 Gbps,轉換器分辨率為8位。器件時鐘與高速收發器的參考時鐘相同,設置為 250 MHz,由 DAQ 板 提供。鏈路在子類 1 模式下運行,可確保高速轉換器和 FPGA 之間的確定性延遲。
LIDAR系統面臨的最大挑戰之一是如何將各種功能與發射脈沖同步,以及如何處理從高速ADC接收的必要數據量。為了解決這個問題,HDL設計包含一個IP,該IP提供產生激光脈沖所需的邏輯,控制TIA的內部多路復用器,并為DMA提供背壓。所有這些控制功能都與發射脈沖同步,因此系統不必保存所有原始數字化高速數據流。這樣,系統的整體數據速率大大降低。
軟件
定義激光雷達平臺軟件堆棧的關鍵點是免費和開源的。用戶通過他們獲得“運行、復制、分發、研究、更改和改進軟件的自由”。3從 Linux 內核開始,繼續使用用戶空間工具,一切都尊重這一點。?
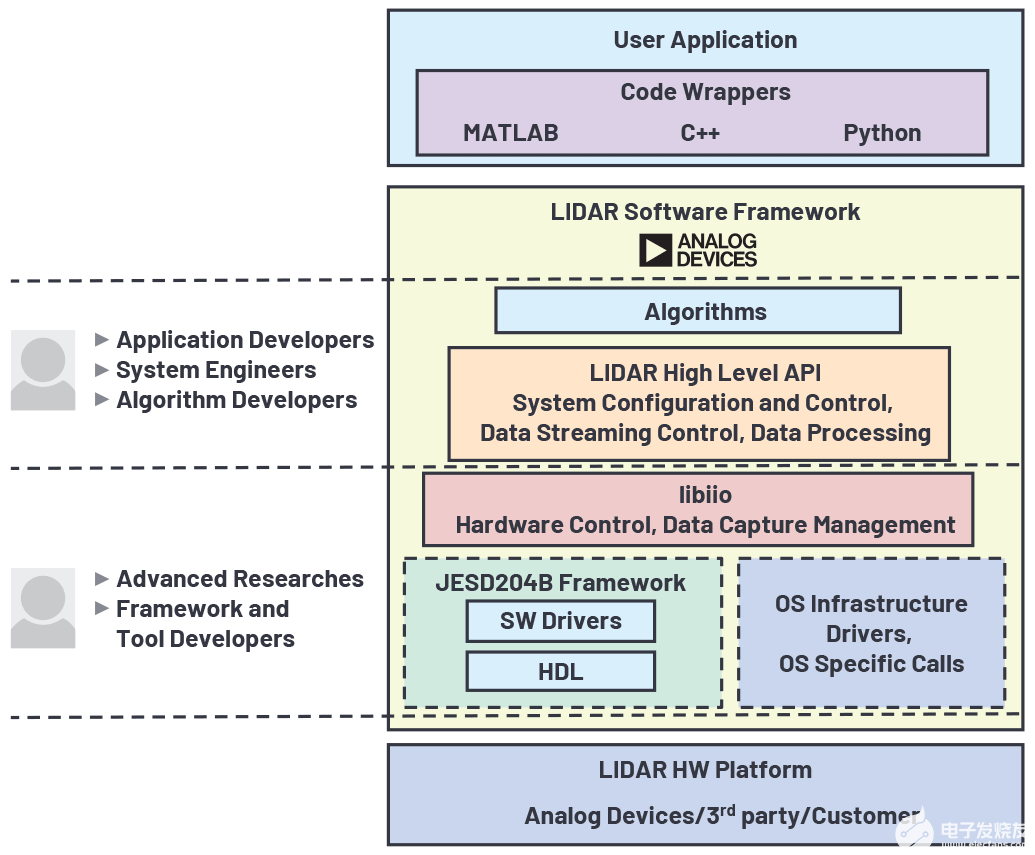
圖7.軟件堆棧。
內核中實現的軟件驅動程序初始化硬件組件,并向用戶公開其所有有用的功能。這些驅動程序中的大多數都是工業 I/O (IIO) Linux 子系統的一部分。4這些驅動程序都與平臺無關,因此硬件更改(包括載波更改(例如,從 Xilinx FPGA 遷移到英特爾驅動程序)不需要更改它們。??
為了簡化軟件接口IIO器件的開發,ADI開發了libiio庫。5它抽象了硬件的低級細節,并提供了一個簡單而完整的編程接口,可用于高級項目。各種可用的libiio后端(例如,本地,網絡,USB,串行)使得可以從在不同操作系統(例如,Linux,Windows,macOS)上運行的應用程序本地和遠程使用IIO設備。??
ADI公司開發的IIO示波器是使用libiio與IIO器件接口的應用示例,可在系統評估階段使用。該工具可以在不同模式(例如,時域、頻域、星座、互相關)下捕獲和繪制數據,傳輸數據,并允許用戶查看和修改檢測到的設備的設置。
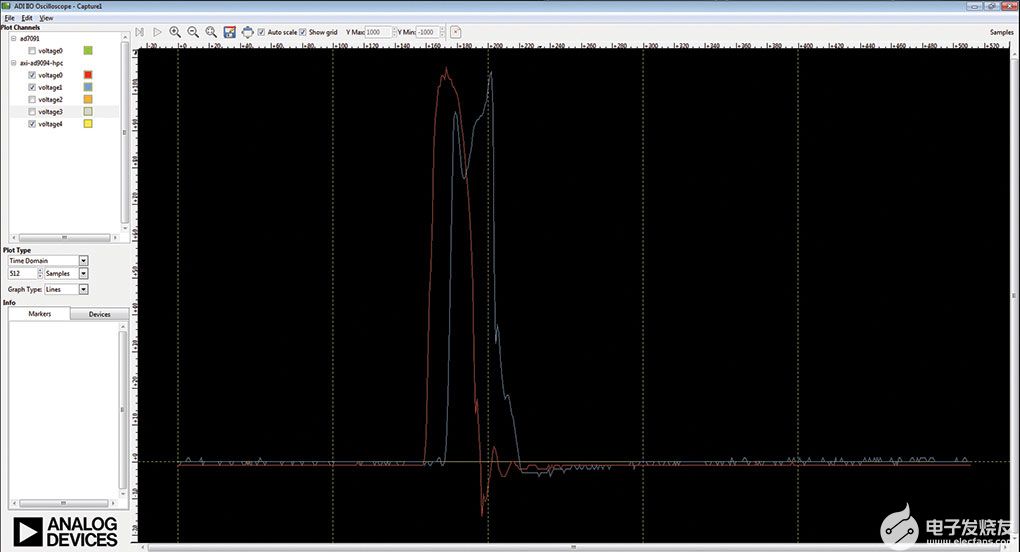
圖8.顯示激光雷達數據的IIO示波器捕獲窗口。
雖然 libiio 提供了一個低級編程接口,但在大多數情況下,用戶期望一個特定于平臺的 API,該 API 抽象低級驅動程序調用并公開一組函數來訪問和配置各種系統參數以及從系統流式傳輸數據。出于這個原因,LIDAR原型平臺附帶了一個特定的API,其中包含用于流行框架和編程語言(如C / C++,MATLAB或Python)的綁定。??6使用戶能夠使用他們喜歡的編程語言與系統交互,并專注于算法和應用程序,這是向客戶提供的價值。
結論
在任何系統設計中,當建立架構并做出設計決策時,都會存在一定程度的歧義。這表示系統在構建后無法按預期工作或執行的風險,從而導致多個設計周期、增加開發成本和延長產品上市時間。參考設計建立在旨在相互互操作的預制系統之上,與使用從頭開始構建的自定義一次性設計相比,參考設計可降低風險并提高整體可預測性和可靠性。在規劃過程中使用參考設計作為起點有助于更快地將新設計推向市場,并有助于確保減少意外和問題。系統設計人員一直在尋找參考平臺來證明設計決策,從而降低風險并提高可靠性。使用清晰和標準化的設計選項啟動項目有助于規劃過程。它通過使用通用語言來幫助協調目標,鼓勵跨多個職能部門的合作和參與,并更輕松地評估設計目標之間的權衡。LIDAR原型設計平臺試圖通過提供可在初始系統架構階段引用的開源硬件和軟件設計來滿足這些需求。硬件平臺和軟件堆棧可用于產品開發的所有階段,從初始系統評估、開發和集成到最終產品中。參考設計的內容(如工程圖紙和 BOM)為構建可構建、合法和本地化的設計系統提供了良好的開端。這縮短了設計周期,并可能在此過程中節省資金。模塊化硬件設計允許各種配置選項以滿足特定的應用程序要求,而開源軟件堆棧基于行業標準框架和編程語言,并附有應用程序示例,使客戶能夠專注于開發為其產品帶來價值的應用程序,而無需在堆棧的低級部分花費精力。
審核編輯:郭婷
-
傳感器
+關注
關注
2553文章
51395瀏覽量
756599 -
FPGA
+關注
關注
1630文章
21797瀏覽量
606015 -
激光雷達
+關注
關注
968文章
4026瀏覽量
190409
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論