") PnP幾何結(jié)構(gòu)和算法原理詳解
PnP幾何結(jié)構(gòu)和算法原理詳解
PnP(Perspective-n-Point)問題的幾何結(jié)構(gòu)如圖1所示,給定3D點(diǎn)的坐標(biāo)、對應(yīng)2D點(diǎn)坐標(biāo)以及內(nèi)參矩陣,求解相機(jī)的位姿。
數(shù)學(xué)語言描述如下:
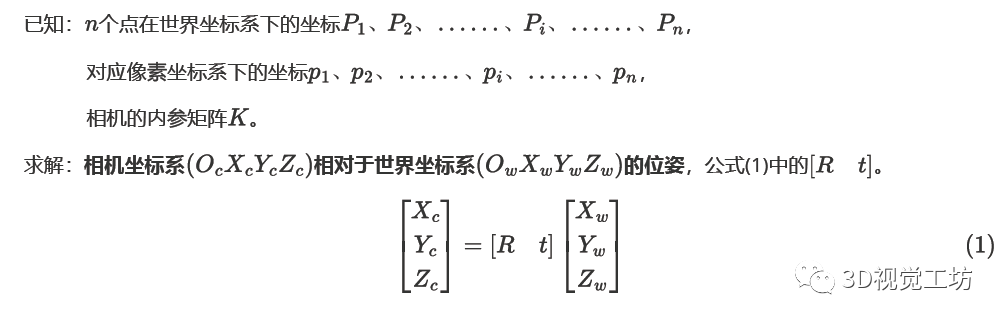
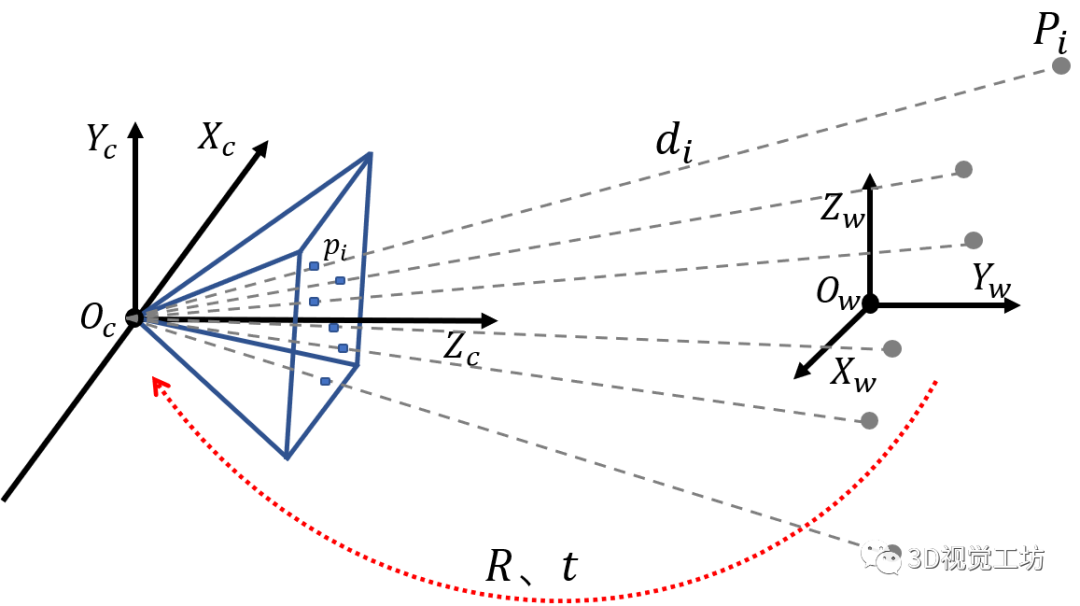
圖1.PnP幾何結(jié)構(gòu)
1.直接線性變換法(Direct Linear Transform,DLT)
假設(shè):攝像機(jī)已經(jīng)校準(zhǔn)過了。 已知:

求解相機(jī)的外參:R、t 透視投影模型為:
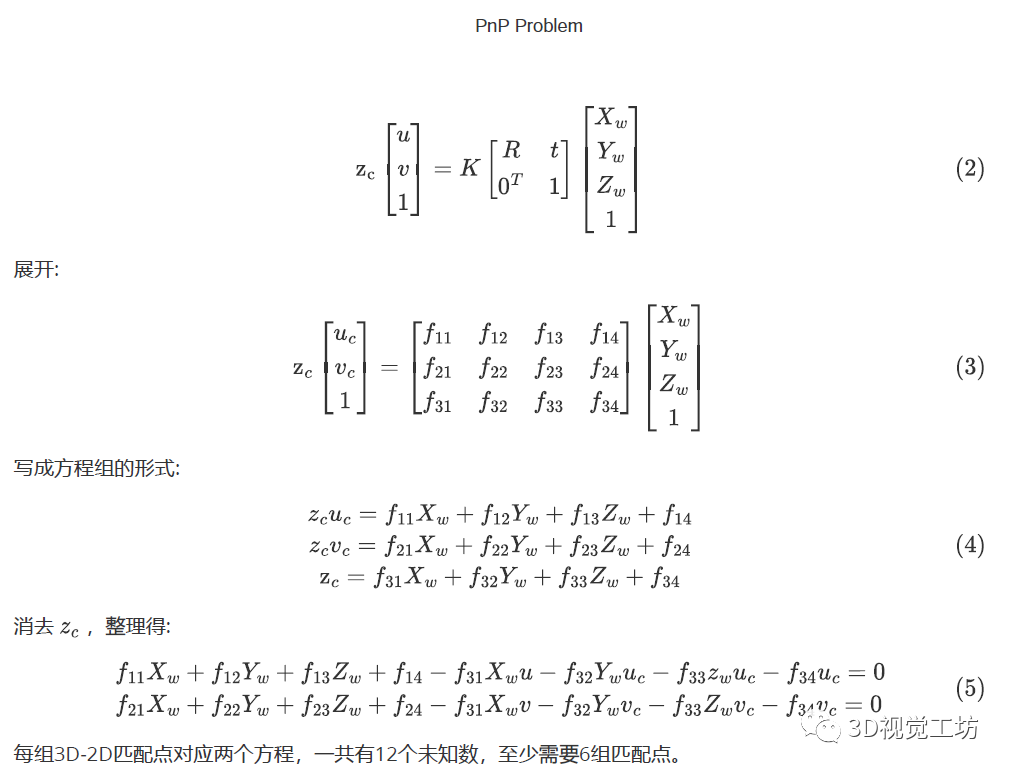
每組3D-2D匹配點(diǎn)對應(yīng)兩個(gè)方程,一共有12個(gè)未知數(shù),至少需要6組匹配點(diǎn)。 設(shè)有N組匹配點(diǎn),則:
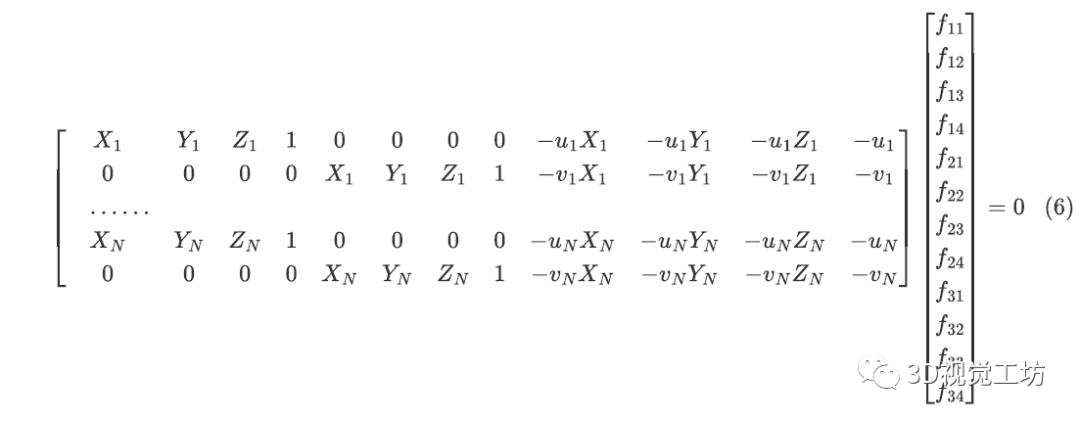
上式寫成矩陣形式: AF=0 當(dāng)N=6時(shí),可以直接求解線性方程組。

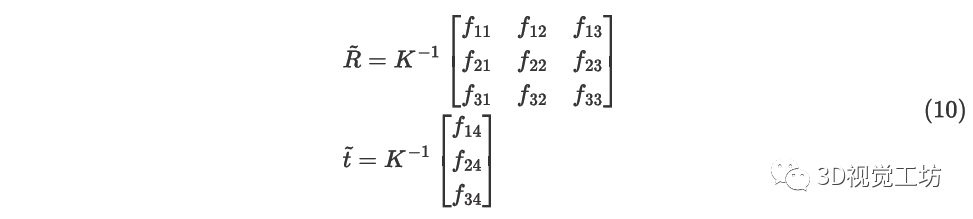
因此, 旋轉(zhuǎn)矩陣, 平移矩陣求得:
2.P3P
P3P問題是已知三個(gè)3D目標(biāo)點(diǎn)與其2D投影之間的對應(yīng)關(guān)系,來確定標(biāo)定相機(jī)的位姿問題。
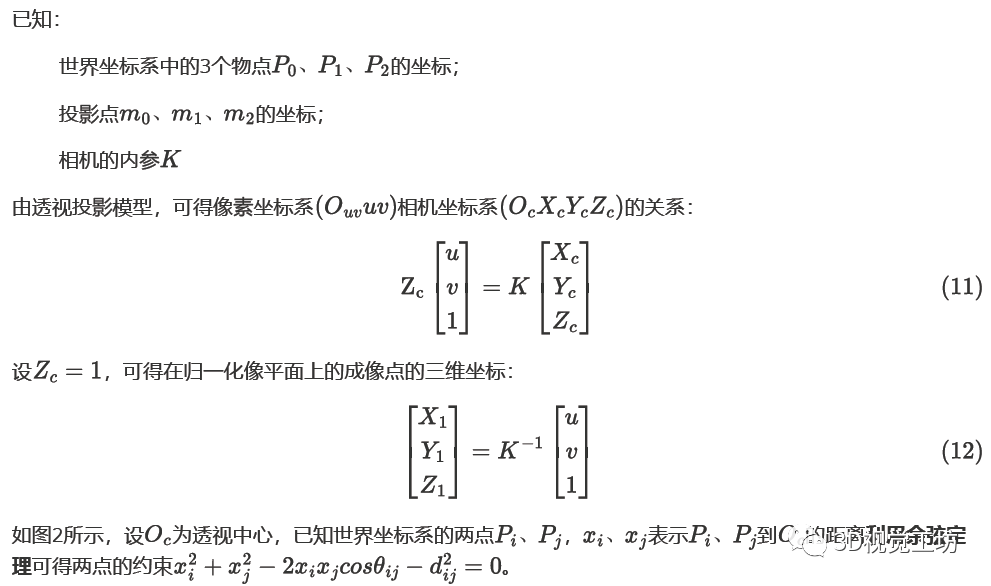
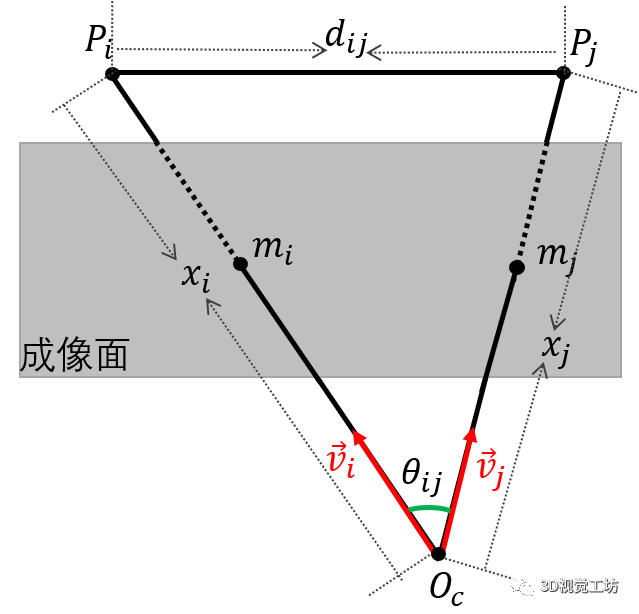
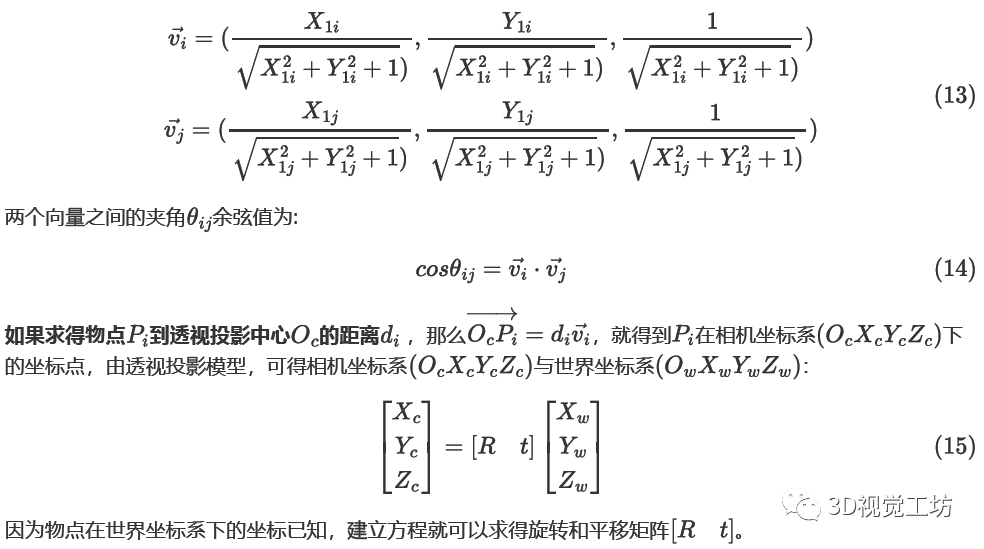
圖2.兩點(diǎn)約束

注:直接線性變換法,只考慮了線性意義下的最優(yōu)解,沒有考慮幾何約束。而P3P考慮了三角約束,給出三角約束意義下的最優(yōu)解
2.1 Zero Structure for the P3P Equation System
文章[1]:Complete Solution Classification for the Perspective-Three-Point Problem
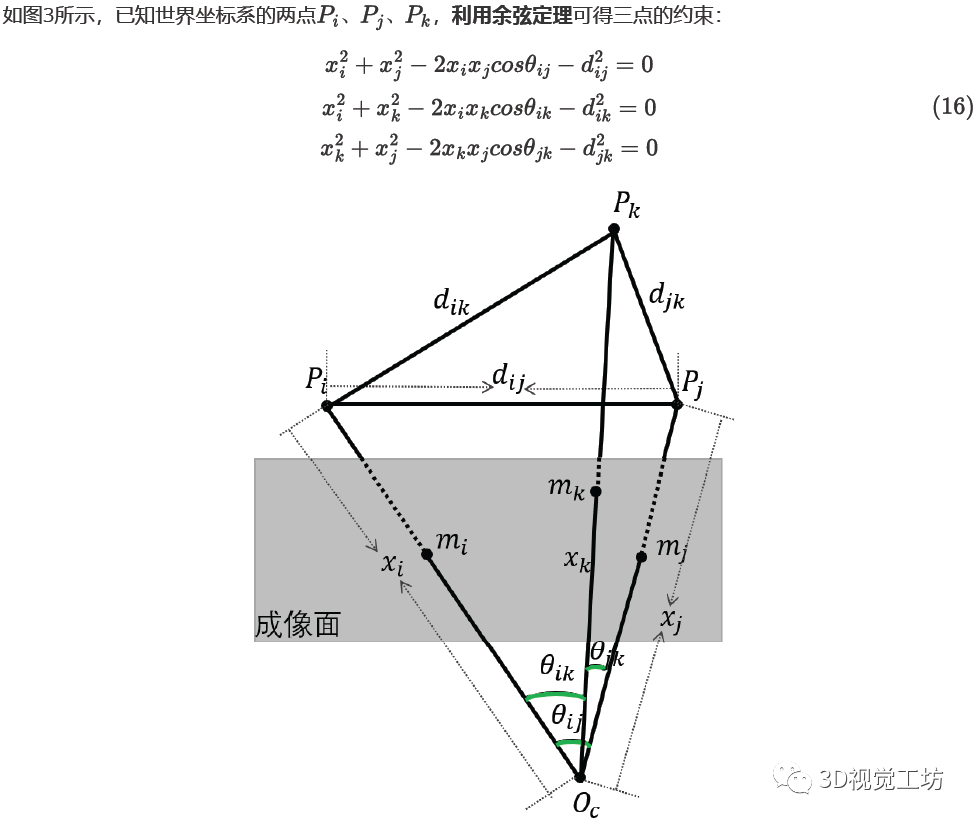
圖3.三點(diǎn)約束 對于公式(16)的變量有一些真實(shí)的約束:
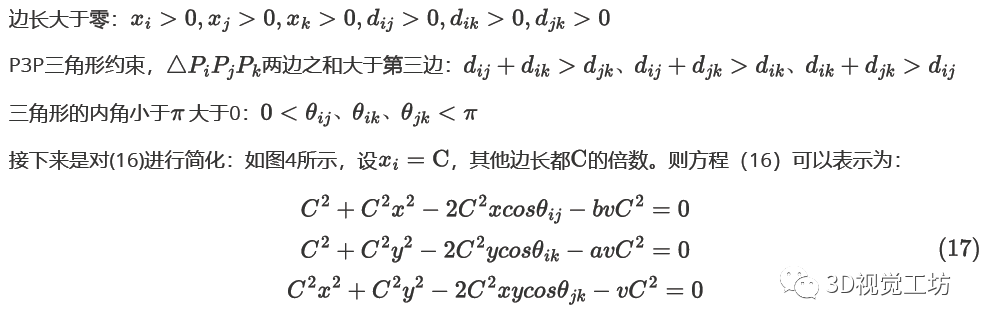
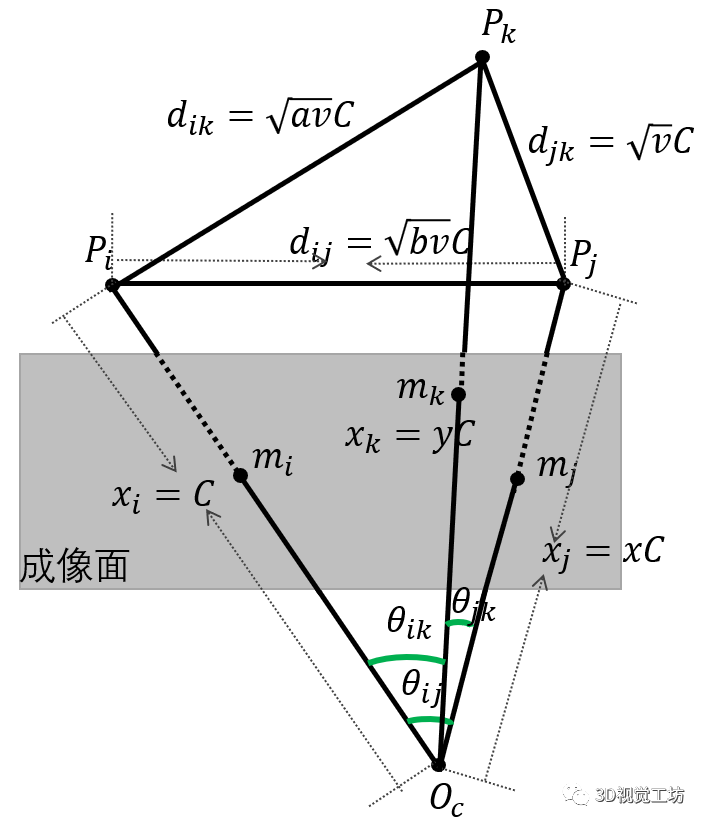
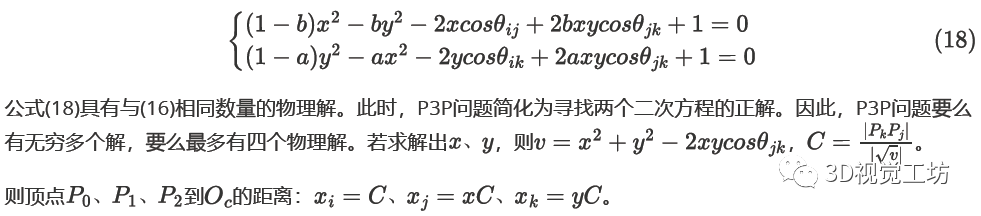
圖4.三點(diǎn)約束--重定義邊長 公式(17)消去C、v,得ES:
2.2 PST
文章[2]:A Stable Direct Solution of Perspective-Three-Point Problem 使用相似三角形,利用幾何約束來減少未知參數(shù)的個(gè)數(shù),把P3P方程組轉(zhuǎn)化為四次方程,該稱為透視相似三角形方法(Perspective Similar Triangle ,PST)。
(1)P3P問題轉(zhuǎn)為PST問題
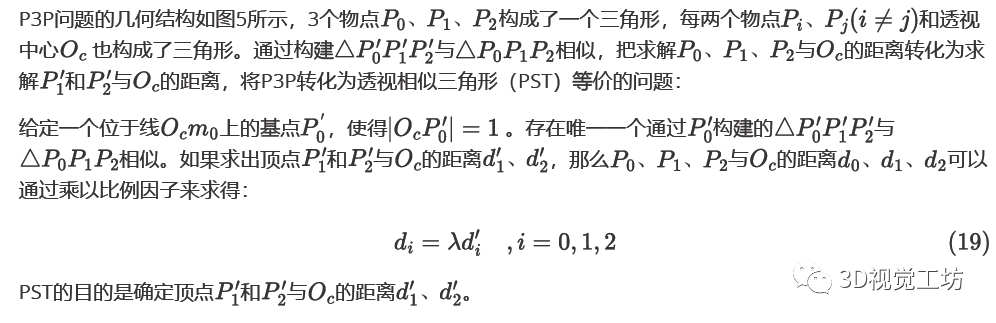
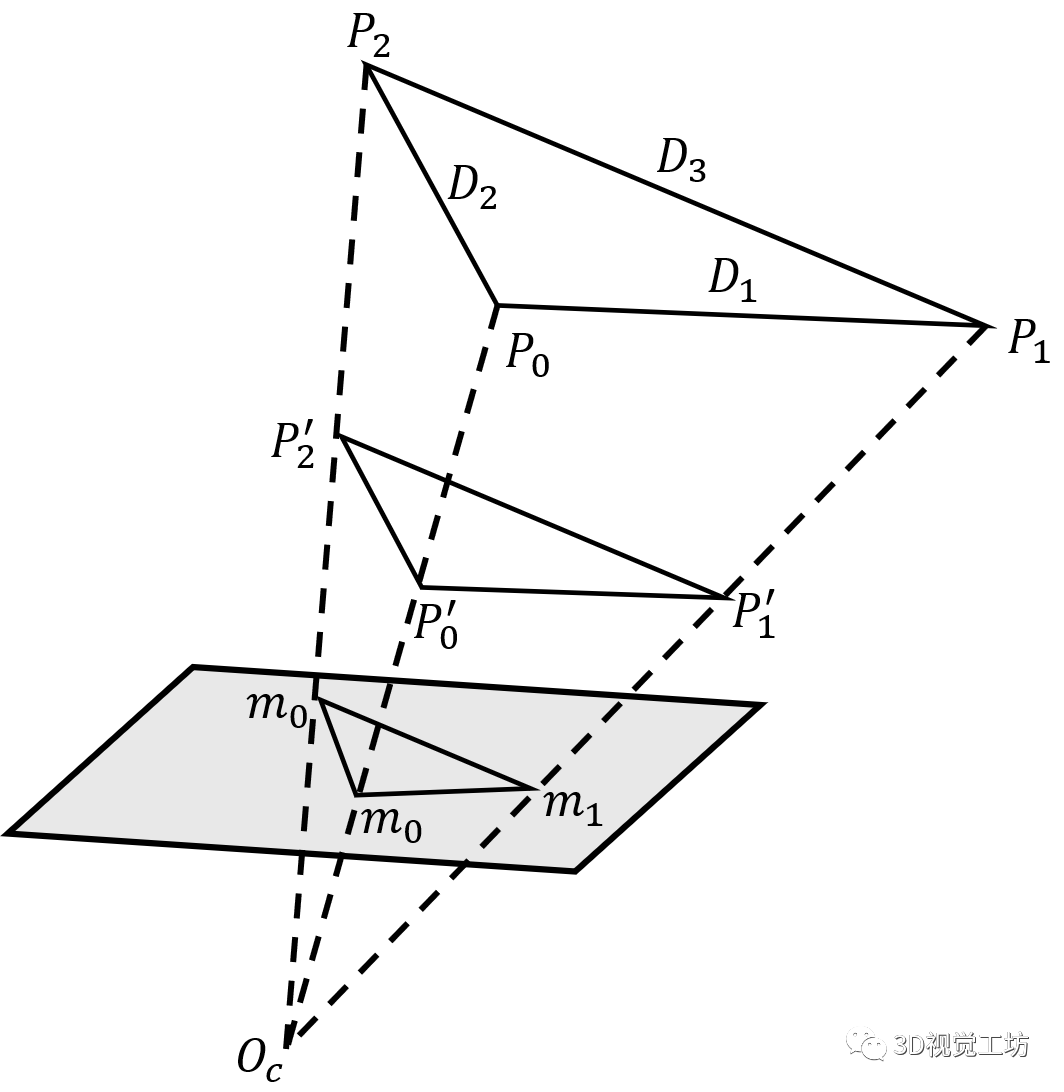
圖5.P3P幾何結(jié)構(gòu)
(2)PST的求解
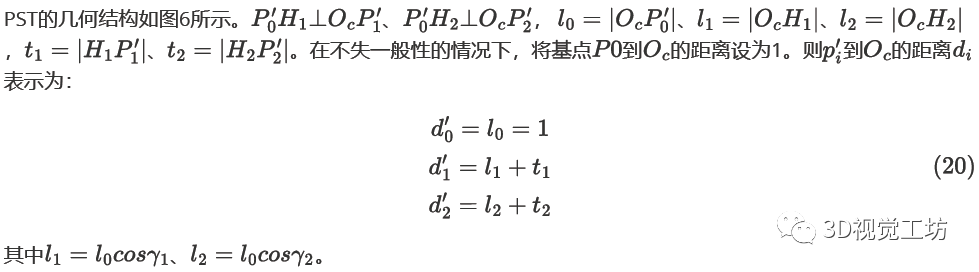
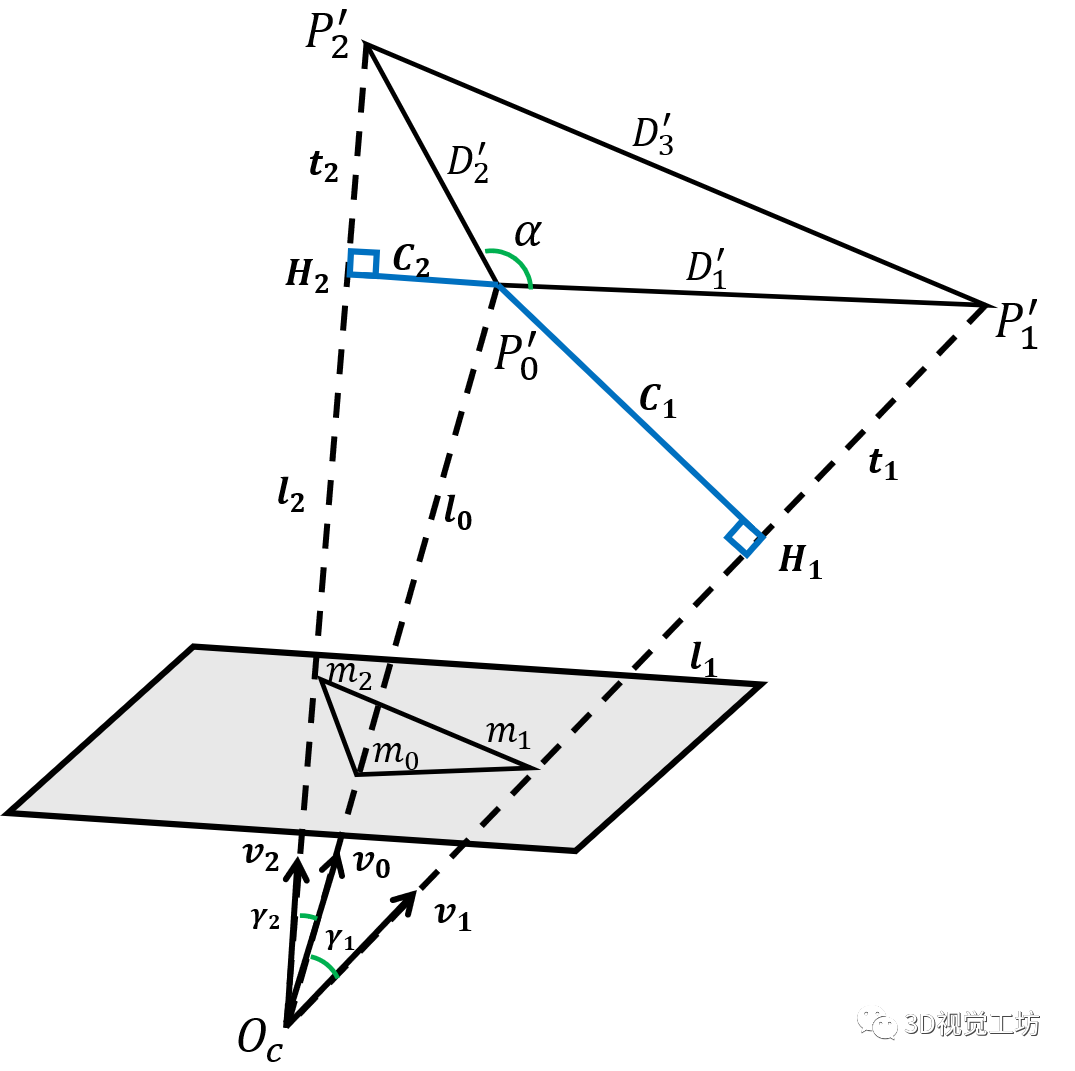
圖6.PST幾何結(jié)構(gòu) 約束1:相似三角形對應(yīng)邊成比例
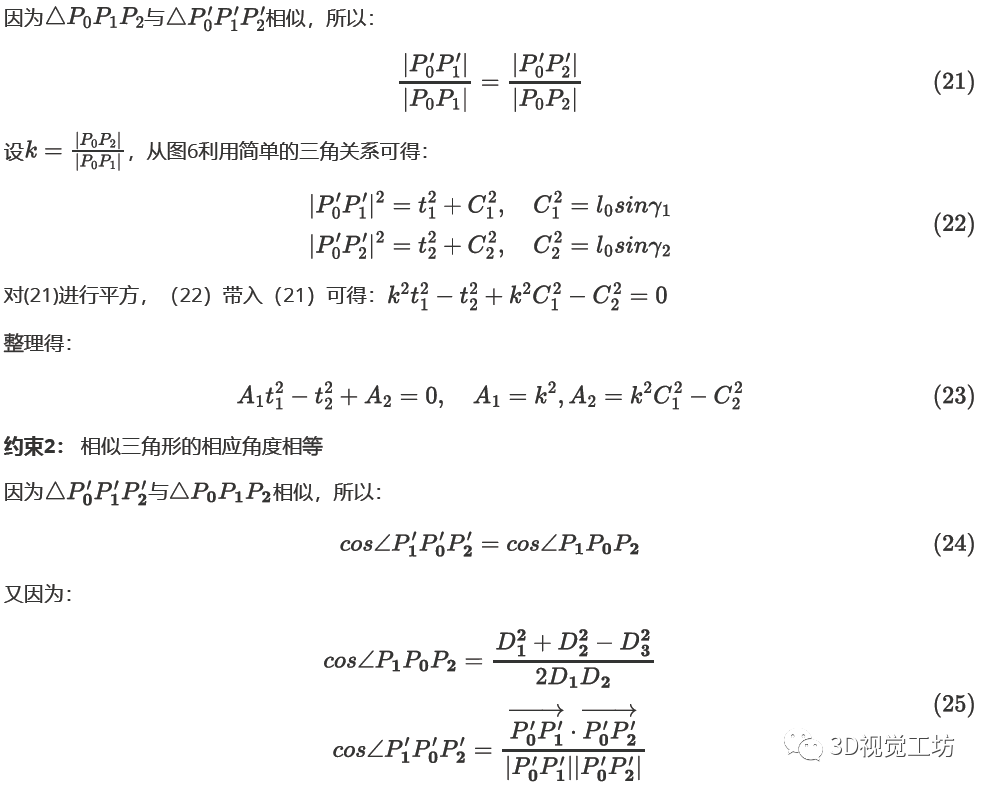
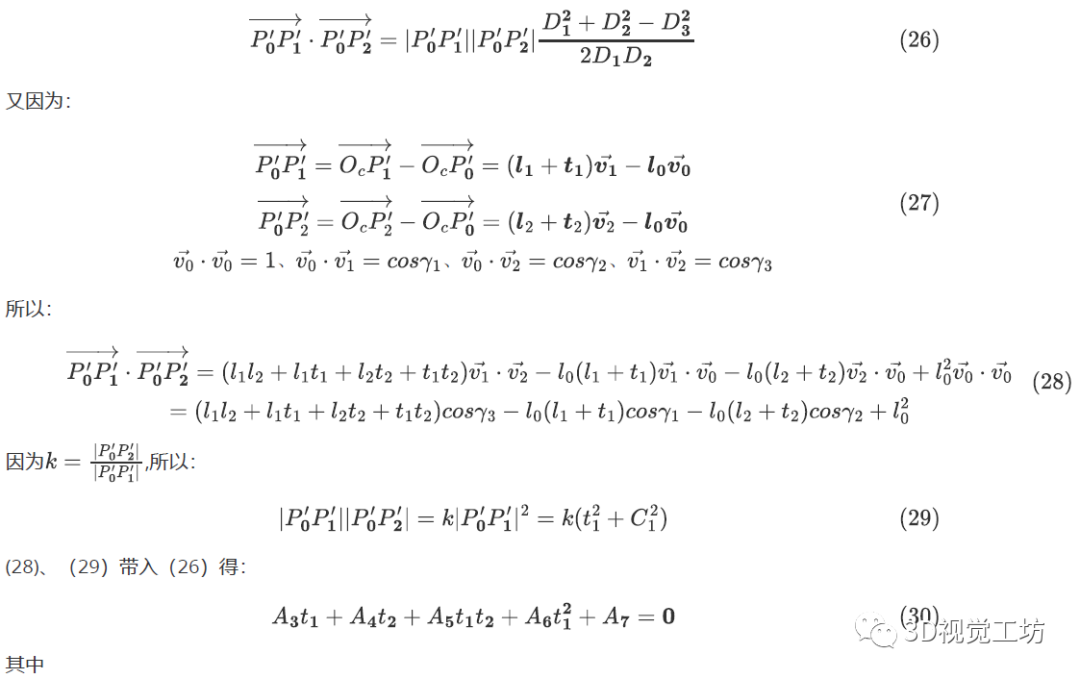
所以:


(3)PST多解和缺解問題
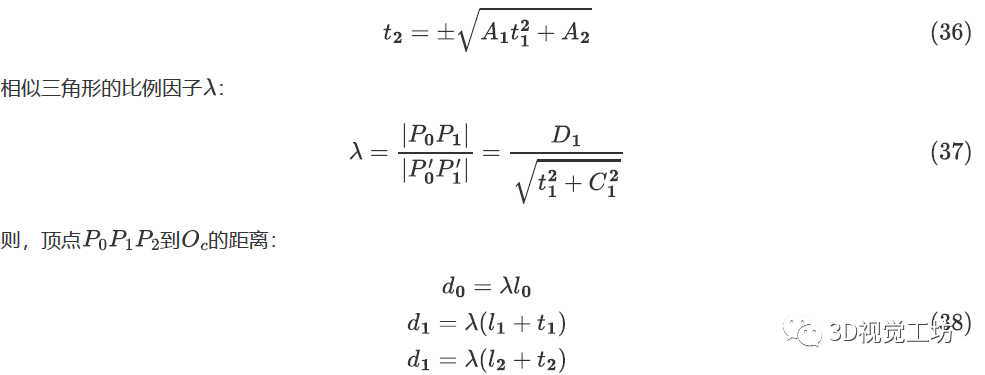
由PST(perspective similar Triangle)求解,可得方程組等效轉(zhuǎn)換為四次多項(xiàng)式

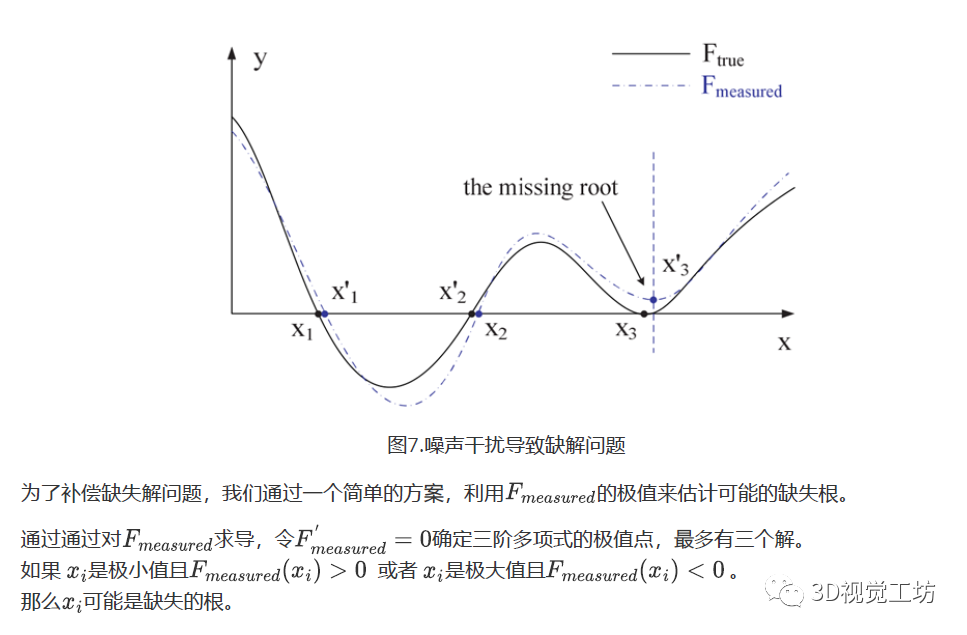
多解問題: 由于存在多組解,相機(jī)位姿不能從3點(diǎn)集唯一確定的。解的個(gè)數(shù)直接對應(yīng)于四次多項(xiàng)式實(shí)根的個(gè)數(shù)。要得到唯一的解,至少還應(yīng)引入一點(diǎn),構(gòu)建2個(gè)三角形,進(jìn)行求解。另一種方法是RANSAC算法,該算法將點(diǎn)集劃分為3個(gè)點(diǎn)子集,檢查這些子集的一致性。 RANSAC算法參考文獻(xiàn):Random Sample Consensus: A Paradigm for Model Fitting with Apphcatlons to Image Analysis and Automated Cartography 缺解問題:

缺解問題是由P3P的固有結(jié)構(gòu)決定的,其他P3P方法,如迭代解法、幾何解法和分類法,也有同樣的問題。

3.RPnP
文章[3]:A Robust O(n) Solution to the Perspective-n-Point Problem
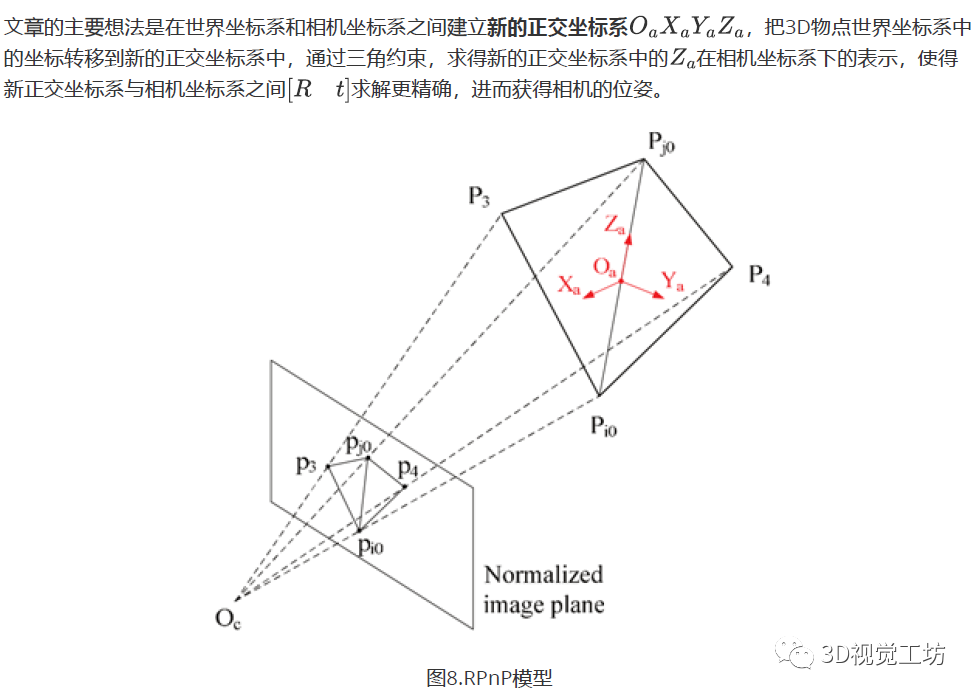
下面來看一下,如何建立新的正交坐標(biāo)系,以及如何求解正交坐標(biāo)系到相機(jī)坐標(biāo)系之間[R T]。
3.1確定旋轉(zhuǎn)軸
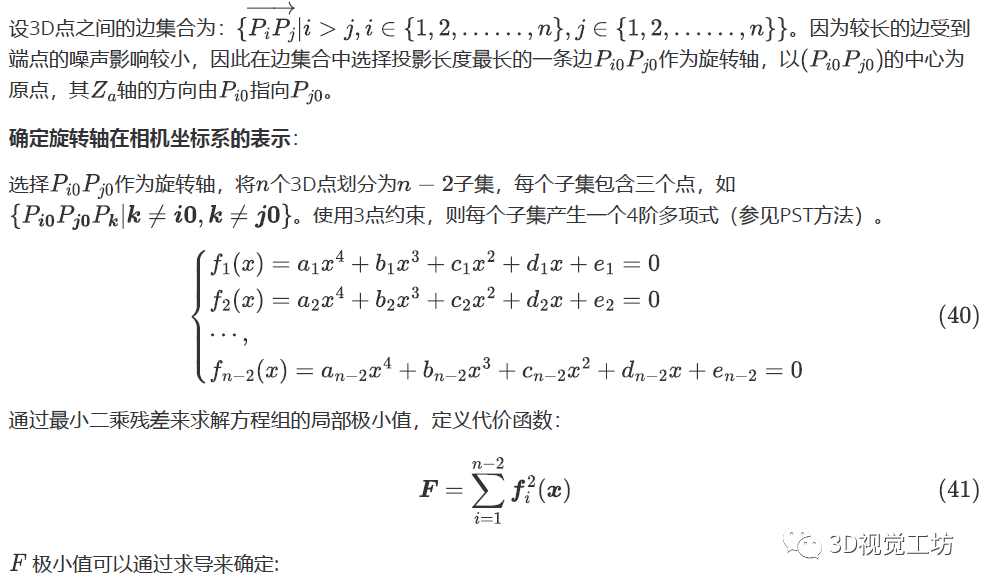
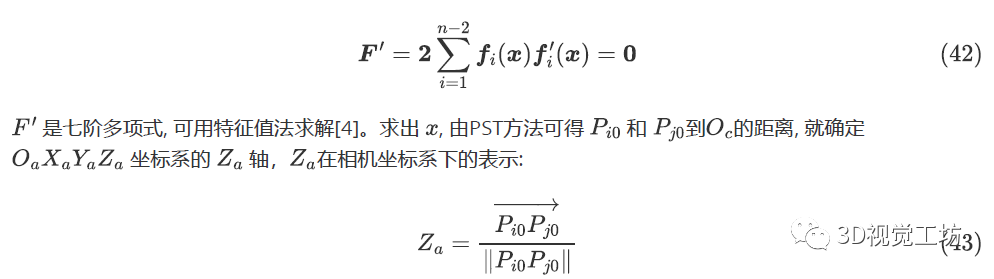
當(dāng)確定旋轉(zhuǎn)軸時(shí),只需求解剩余的旋轉(zhuǎn)和三個(gè)平移參數(shù),減少了未知變量的數(shù)量,來提高方程組的數(shù)值精度。
3.2求解旋轉(zhuǎn)角和平移矢量的方程
相機(jī)坐標(biāo)系與新坐標(biāo)系繞之間的旋轉(zhuǎn)矩陣:

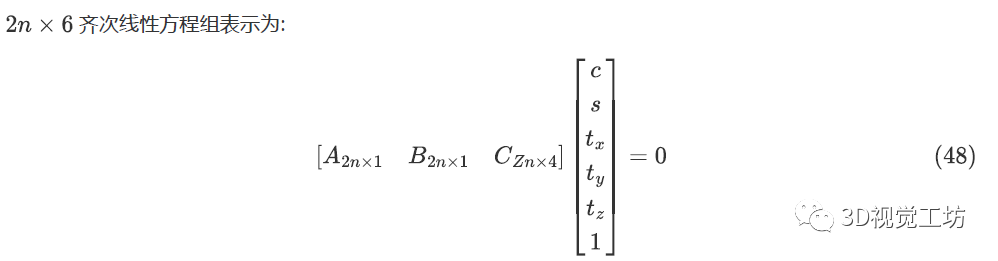
其中,
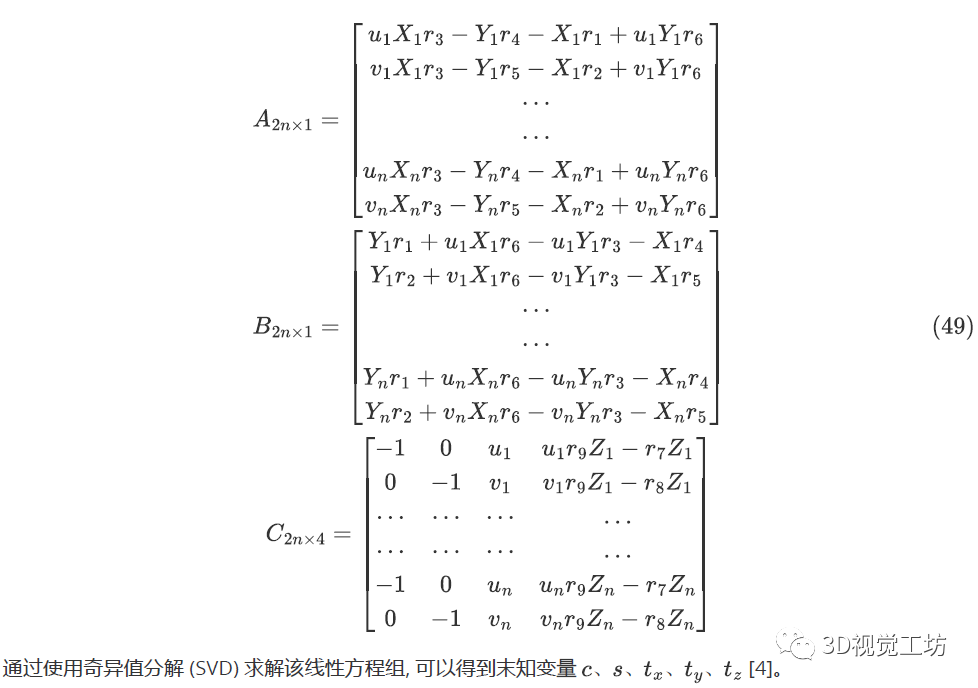
3.3獲取相機(jī)的位姿

再獲取到相機(jī)坐標(biāo)系與新坐標(biāo)系繞之間的旋轉(zhuǎn)和平移矩陣,進(jìn)而可直接相機(jī)坐標(biāo)系與世界坐標(biāo)系繞之間旋轉(zhuǎn)和平移矩陣,即相機(jī)的位姿。
審核編輯:郭婷
-
相機(jī)
+關(guān)注
關(guān)注
4文章
1369瀏覽量
53914 -
pnp
+關(guān)注
關(guān)注
11文章
299瀏覽量
51966
原文標(biāo)題:一文詳解PnP算法原理
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
光波導(dǎo)系統(tǒng)中光柵幾何結(jié)構(gòu)的優(yōu)化
光波導(dǎo)系統(tǒng)中光柵幾何結(jié)構(gòu)的優(yōu)化
npn和pnp的判斷方法
PNP傳感器的功能和結(jié)構(gòu)
PNP傳感器的工作原理
PNP傳感器在汽車領(lǐng)域有哪些應(yīng)用
pnp傳感器怎么接繼電器
二線磁性開關(guān)是NpN還是pNp
神經(jīng)網(wǎng)絡(luò)算法的結(jié)構(gòu)有哪些類型
機(jī)器學(xué)習(xí)算法原理詳解
PNP晶體管符號和結(jié)構(gòu) 晶體管測試儀電路圖





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論