") 未來服務(wù)對傳感器的需求:用于狀態(tài)監(jiān)測的智能傳感器
未來服務(wù)對傳感器的需求:用于狀態(tài)監(jiān)測的智能傳感器
改進(jìn)狀態(tài)監(jiān)測和診斷以及整個系統(tǒng) 優(yōu)化,是當(dāng)今機(jī)械使用中的一些核心挑戰(zhàn) 設(shè)施和技術(shù)系統(tǒng)。這個話題正在變得越來越大 不僅在工業(yè)領(lǐng)域,而且在使用機(jī)器的任何地方。 過去根據(jù)計(jì)劃維修的機(jī)器和后期維護(hù) 將意味著生產(chǎn)停機(jī)的風(fēng)險(xiǎn)。今天,處理來自 機(jī)器用于預(yù)測剩余使用壽命。特別是 記錄溫度、噪聲和振動等關(guān)鍵參數(shù) 幫助確定最佳運(yùn)行狀態(tài)甚至必要的維護(hù) 次。這樣可以避免不必要的磨損 及早發(fā)現(xiàn)故障及其原因。在此的幫助下 監(jiān)控,在設(shè)施可用性方面具有相當(dāng)大的優(yōu)化潛力 有效性出現(xiàn),帶來決定性的優(yōu)勢。為 例如,有了它,ABB1可驗(yàn)證地將停機(jī)時間減少多達(dá) 70%, 將電機(jī)使用壽命延長達(dá) 30%,并降低能耗 一年內(nèi)其設(shè)施的10%。
這種預(yù)測性維護(hù)(PM)的主要元素,眾所周知 技術(shù)術(shù)語,是基于狀態(tài)的監(jiān)測(CBM),通常是旋轉(zhuǎn)的 渦輪機(jī)、風(fēng)扇、泵和電機(jī)等機(jī)器。有了煤層氣, 實(shí)時記錄有關(guān)運(yùn)行狀態(tài)的信息。然而 不對可能的故障或磨損做出預(yù)測。他們只 通過PM實(shí)現(xiàn),從而標(biāo)志著一個轉(zhuǎn)折點(diǎn):在 更智能的傳感器和更強(qiáng)大的通信網(wǎng)絡(luò) 計(jì)算平臺,可以創(chuàng)建模型,檢測變化, 并對使用壽命進(jìn)行詳細(xì)計(jì)算。
為了創(chuàng)建有意義的模型,有必要分析振動, 溫度、電流和磁場。現(xiàn)代有線和無線 通信方法已經(jīng)允許在工廠或公司范圍內(nèi)使用 今天對設(shè)施的監(jiān)控。產(chǎn)生額外的分析可能性 通過基于云的系統(tǒng)使數(shù)據(jù)提供信息 關(guān)于機(jī)器的狀況,操作員可以訪問 和維修技術(shù)人員以簡單的方式。然而,本地智能傳感器 機(jī)器上的通信基礎(chǔ)設(shè)施是必不可少的 所有這些附加分析可能性的基礎(chǔ)。這些傳感器如何 應(yīng)該看,對他們提出了哪些要求,關(guān)鍵是什么 特征是 - 這些問題和其他問題將在 本文。
機(jī)器生命周期的表示
狀態(tài)監(jiān)測中最基本的問題可能是:如何 我可以在需要維護(hù)之前讓機(jī)器運(yùn)行很長時間嗎?
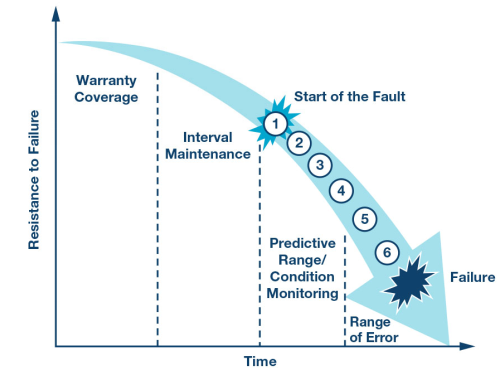
一般來說,從邏輯上講,越早進(jìn)行維護(hù), 越好。但是,為了優(yōu)化操作和維護(hù) 成本或充分實(shí)現(xiàn)最大設(shè)施效率的知識 需要熟悉機(jī)器特性的專家。 在電機(jī)分析方面,這些專家主要來自該領(lǐng)域 軸承/潤滑,經(jīng)驗(yàn)證明是最弱的 鏈接。專家最終決定是否偏離正常狀態(tài) 關(guān)于實(shí)際生命周期(見圖1)應(yīng)該已經(jīng)領(lǐng)先 修理甚至更換。
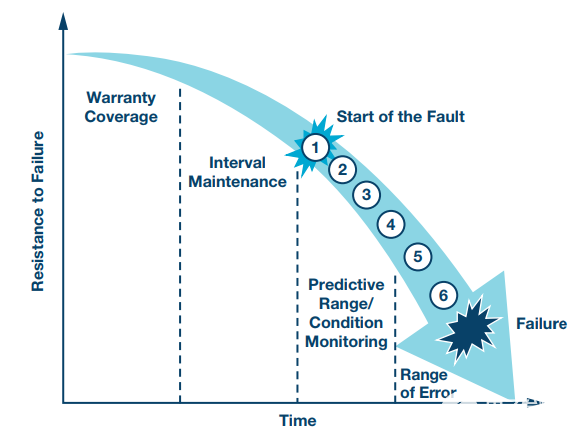
圖1.機(jī)器的生命周期。
因此,尚未使用的機(jī)器最初處于所謂的保修階段。 可能無法排除生命周期早期階段的故障, 但它相對罕見,通常可以追溯到生產(chǎn)故障。 只有在間隔維護(hù)的后續(xù)階段才有針對性地 由經(jīng)過適當(dāng)培訓(xùn)的服務(wù)人員開始干預(yù)。他們 包括獨(dú)立于機(jī)器的 在指定時間或指定使用時間之后的條件,就像 例如,換油的情況。在這里,區(qū)間之間的失敗概率也仍然很低。隨著機(jī)器使用年限的增加, 達(dá)到狀態(tài)監(jiān)測階段。從這一點(diǎn)開始,故障應(yīng)該是 預(yù)期。圖 1 顯示了以下六個更改,從更改開始 水平在超聲波范圍 (1) 中,然后是振動 (2)。通過 分析潤滑劑(3)或通過溫度的輕微升高(4), 可以在實(shí)際故障之前檢測到待處理故障的最初跡象 以可感知的噪音(5)或發(fā)熱(6)的形式發(fā)生。振動 通常用于識別衰老。三種相同的振動模式 機(jī)器在其生命周期內(nèi)如圖 2 所示。在初期, 都在正常范圍內(nèi)。然而,從中年開始, 振動根據(jù)之前的負(fù)載或多或少地迅速增加 在使用壽命結(jié)束時呈指數(shù)級增長至臨界范圍。只要 機(jī)器達(dá)到臨界范圍,需要立即反應(yīng)。
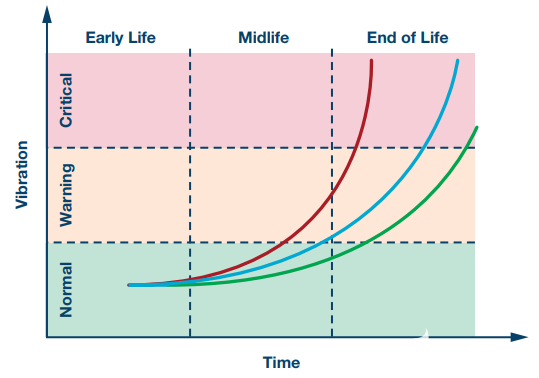
圖2.振動參數(shù)隨時間的變化。
通過振動分析建立層氣
輸出速度、傳動比、數(shù)量等參數(shù) 軸承元件對于機(jī)器分析至關(guān)重要 振動模式。通常,變速箱引起的振動是 在頻域中被視為軸速度的倍數(shù), 而軸承的特性頻率通常不代表 諧波分量。湍流和氣蝕引起的振動是 也經(jīng)常被發(fā)現(xiàn)。它們通常與空氣和/或液體連接 風(fēng)扇和泵中的流量,因此往往被認(rèn)為是隨機(jī)的 振動。它們通常是靜止的,其統(tǒng)計(jì)特性沒有變化。然而,隨機(jī)振動也可以是循環(huán)靜止的 因此具有統(tǒng)計(jì)特性。它們由 機(jī)器并定期變化,如在內(nèi)燃機(jī)中 每個氣缸中每個循環(huán)發(fā)生一次點(diǎn)火。
傳感器方向也起著關(guān)鍵作用。如果主要是線性振動 由單軸傳感器測量,傳感器必須根據(jù) 到振動的方向。還有多軸傳感器 可以記錄所有方向的振動,但單軸傳感器提供更低的振動 噪聲、更高的力測量范圍和更大的帶寬,因?yàn)樗鼈?物理特性。
對振動傳感器的要求
為了能夠廣泛使用振動傳感器進(jìn)行狀態(tài)監(jiān)測, 有兩個因素非常重要:低成本和小尺寸。哪里 以前經(jīng)常使用基于MEMS的壓電傳感器 如今,加速度計(jì)的使用越來越多。它們具有更高的功能 分辨率,出色的漂移和靈敏度特性,以及更好的 信噪比,能夠檢測極低 頻率振動幾乎低至直流范圍。他們也非常 省電,這就是為什么它們也是電池供電的理想選擇 無線監(jiān)控系統(tǒng)。與壓電傳感器相比的另一個優(yōu)點(diǎn)是 將整個系統(tǒng)集成到單個外殼中的可能性(系統(tǒng) 在包裝中)。這些所謂的SiP解決方案正在發(fā)展形成 通過整合其他重要功能的智能系統(tǒng): 模數(shù)轉(zhuǎn)換器、帶嵌入式固件的微控制器 用于特定于應(yīng)用程序的預(yù)處理、通信協(xié)議和 通用接口,同時還包括多種保護(hù)功能。
集成保護(hù)功能很重要,因?yàn)檫^高 作用在傳感器元件上的力通常會導(dǎo)致傳感器損壞或 甚至破壞。對可能的超量程的集成檢測可提供 通過關(guān)閉來警告或停用陀螺儀中的傳感器元件 其內(nèi)部時鐘,從而保護(hù)傳感器元件。SiP 解決方案是 如圖 3 所示。
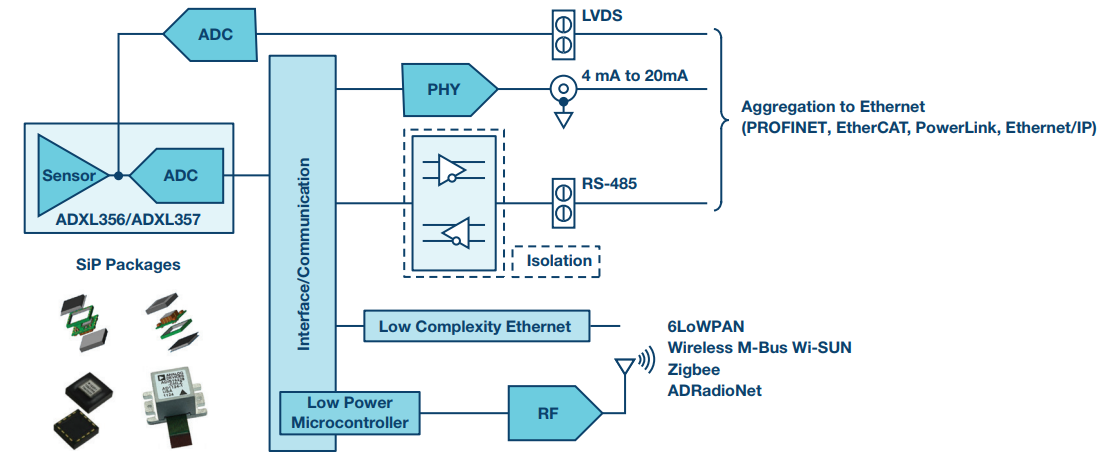
圖3.基于MEMS的系統(tǒng)封裝(左側(cè))。
隨著煤層氣領(lǐng)域需求的增加,對傳感器的需求也在增加。 對于有用的煤層氣,有關(guān)傳感器測量范圍的要求 (滿量程范圍,或簡稱FSR)已經(jīng)部分大于±50 g。
因?yàn)榧铀俣扰c頻率的平方成正比, 這些高加速力可以相對較快地達(dá)到。這已被證明 通過公式 1:

變量 a 代表加速度,f 代表頻率,d 代表振幅 的振動。因此,例如,對于 1 kHz 的振動,振幅為 1 μm 已經(jīng)產(chǎn)生 39.5 g 的加速度。
關(guān)于噪聲性能,這應(yīng)該非常低,就像 頻率范圍盡可能,從近直流到中間兩位數(shù)kHz 范圍,因此除了其他偽影之外,軸承噪聲也可能已經(jīng) 以非常低的速度檢測到。然而,正是在這里,制造商 的振動傳感器目前面臨著巨大的挑戰(zhàn),尤其是 用于多軸傳感器。只有少數(shù)制造商提供足夠的低 帶寬大于 2 kHz 的噪聲傳感器,用于多個噪聲傳感器 軸。ADI公司(ADI)開發(fā)了專為CBM應(yīng)用開發(fā)的ADXL356/ADXL357三軸傳感器系列。它提供了非常 良好的噪聲性能和出色的溫度穩(wěn)定性。盡管 它們的有限帶寬為 1.5 kHz(諧振頻率 = 5.5 kHz),這些 加速度計(jì)仍然在狀態(tài)監(jiān)測中提供重要的讀數(shù) 低速設(shè)備,如風(fēng)力渦輪機(jī)。
ADXL100x系列中的單軸傳感器適用于 帶寬。它們提供高達(dá) 24 kHz 的帶寬(諧振頻率 = 45 kHz),g范圍高達(dá)±100 g,噪聲水平極低。 由于帶寬高,大多數(shù)故障發(fā)生在旋轉(zhuǎn)中 機(jī)器(損壞的滑動軸承、不平衡、摩擦、松動、齒輪 齒缺陷、軸承磨損和氣蝕)可以用這個來檢測 傳感器系列。
可能的分析方法 基于狀態(tài)的監(jiān)控
CBM中的機(jī)器狀態(tài)分析可以使用各種 方法。可能最常見的方法是及時分析 域、頻域分析以及兩者的混合。
1. 基于時間的分析
在時域振動分析中,有效值(均值根) 平方,或簡稱RMS),峰峰值和幅度 考慮振動(見圖4)。
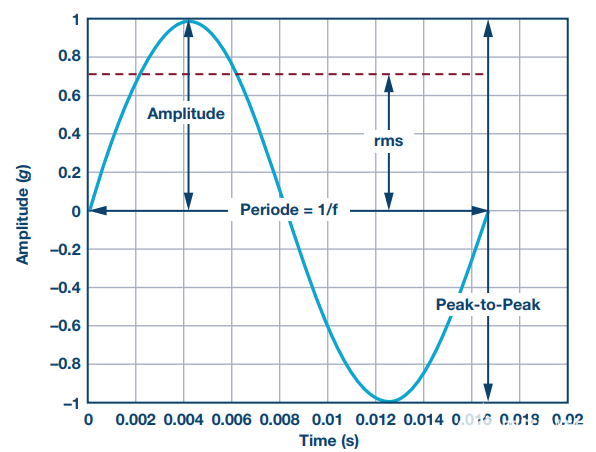
圖4.諧波振動信號的幅度、有效值和峰峰值。
峰峰值反映了電機(jī)的最大撓度 軸,從而可以得出有關(guān)其最大載荷的結(jié)論。 相反,振幅值描述了發(fā)生的振動的大小并識別異常的沖擊事件。但是,持續(xù)時間或 振動事件期間的能量以及因此的破壞能力 不被考慮。因此,有效值通常是最有意義的 因?yàn)樗瑫r考慮了振動時程和振動 振幅值。均方根統(tǒng)計(jì)閾值的相關(guān)性 振動可以通過所有這些參數(shù)的依賴關(guān)系獲得 關(guān)于電機(jī)速度。
這種類型的分析被證明非常簡單,因?yàn)樗恍枰?基本的系統(tǒng)知識或任何類型的光譜分析。
2. 基于頻率的分析
通過基于頻率的分析,時間變化的振動信號 通過快速傅里葉變換分解為其頻率分量 (FFT)。得到的幅度與頻率的頻譜圖使 監(jiān)測特定頻率分量及其諧波 和邊帶,如圖5所示。

圖5.振動與頻率的頻譜圖。
FFT是振動分析中廣泛使用的方法,特別是 檢測軸承損壞。有了它,相應(yīng)的組件可以 分配給每個頻率分量。通過FFT,占主導(dǎo)地位的 接觸引起的某些故障的重復(fù)脈沖頻率 滾動體和缺陷區(qū)域之間可以過濾掉。由于 對它們不同頻率分量、不同類型的軸承損壞 可以區(qū)分(外圈、內(nèi)圈或球的傷害) 軸承)。但是,有關(guān)軸承、電機(jī)和 為此需要完整的系統(tǒng)。
此外,F(xiàn)FT過程要求離散時間塊 振動在微控制器中重復(fù)記錄和處理。 盡管這需要比基于時間的計(jì)算能力略多 分析確實(shí)如此,它會導(dǎo)致對損害進(jìn)行更詳細(xì)的分析。
3. 基于時間和頻率的分析相結(jié)合
這種類型的分析是最全面的,因?yàn)樗Y(jié)合了 兩種方法的優(yōu)點(diǎn)。時域統(tǒng)計(jì)分析 提供有關(guān)系統(tǒng)隨時間變化的振動強(qiáng)度的信息 同時是否在允許范圍內(nèi)。 基于頻率的分析能夠以以下形式監(jiān)控速度 基頻以及進(jìn)一步的諧波分量 需要精確識別故障癥狀。
基頻的跟蹤尤其具有決定性,因?yàn)?有效值和其他統(tǒng)計(jì)參數(shù)隨速度變化。 如果統(tǒng)計(jì)參數(shù)與上次測量相比發(fā)生顯著變化, 必須檢查基頻,以便可能 可以避免警報(bào)。
測量值隨時間的變化是所有人共有的 三種分析方法。一種監(jiān)控系統(tǒng)的可能方法 可能涉及首先記錄健康狀況,或生成所謂的 指紋。然后將其與不斷記錄的數(shù)據(jù)進(jìn)行比較。在 偏差過大或超過相應(yīng)偏差的情況 閾值,反應(yīng)是必要的。如圖 6 所示,可能 反應(yīng)可以是警告 (2) 或警報(bào) (4)。根據(jù)嚴(yán)重程度, 偏差也可能需要服務(wù)人員立即干預(yù)。

圖6.FFT 的閾值和反應(yīng)。
基于磁場分析的煤層氣
由于集成磁力計(jì)的快速發(fā)展,測量 電機(jī)周圍的雜散磁場代表了另一個有前途的磁場 旋轉(zhuǎn)機(jī)械狀態(tài)監(jiān)測方法。測量是 非接觸式;也就是說,機(jī)器和 傳感器是必需的。與振動傳感器一樣,與磁場一樣 傳感器,有單軸和多軸版本。
對于故障檢測,雜散磁場應(yīng)同時測量 軸向(平行于電機(jī)軸)和徑向 (與電機(jī)軸成直角)。徑向場通常被削弱 定子鐵芯和電機(jī)外殼。同時,它顯著 受氣隙中磁通量的影響。產(chǎn)生軸向磁場 通過鼠籠式轉(zhuǎn)子和末端繞組中的電流 的定子。磁力計(jì)的位置和方向?yàn)?在實(shí)現(xiàn)這兩個領(lǐng)域的測量方面具有決定性意義。因此,選擇 建議放置在靠近軸或電機(jī)外殼的位置。 在 同時因?yàn)榇艌鰪?qiáng)度直接關(guān)系到 溫度。因此,在大多數(shù)情況下,今天的磁場傳感器 包含集成的溫度傳感器。傳感器的校準(zhǔn) 也不應(yīng)忘記對其溫度漂移的補(bǔ)償。
FFT用于基于磁場的電狀態(tài)監(jiān)測 電機(jī)就像振動測量案例一樣。但是,對于 評估電機(jī)狀況,即使是低頻在 幾赫茲到大約 120 赫茲就足夠了。線路頻率突出 顯然,而低頻分量的頻譜占主導(dǎo)地位 如果存在故障。
在鼠籠式轉(zhuǎn)子中轉(zhuǎn)子桿斷裂的情況下,滑移值 也起著決定性的作用。它與負(fù)載相關(guān),理想情況下為 0% 負(fù)荷。在額定負(fù)載下,對于健康的機(jī)器,該負(fù)載在 1% 到 5% 之間,并在發(fā)生故障時相應(yīng)增加。對于煤層氣,測量 因此,應(yīng)在相同的負(fù)載條件下執(zhí)行 消除負(fù)載依賴性的影響
預(yù)測性維護(hù)的狀態(tài)
無論狀態(tài)監(jiān)測的類型如何,即使是最智能的 監(jiān)控概念,沒有100%保證會有 沒有計(jì)劃外停機(jī)、故障或安全風(fēng)險(xiǎn)。這些風(fēng)險(xiǎn)只能 減少。然而,PM越來越多地成為一個關(guān)鍵話題。 在工業(yè)上。它被視為未來可持續(xù)發(fā)展的明確先決條件 生產(chǎn)設(shè)施的成功。然而,為此,創(chuàng)新和 快速發(fā)展——其技術(shù)仍然必須在 部件 - 為必填項(xiàng)。缺陷主要存在于客戶比較中 收益和成本。
盡管如此,許多工業(yè)公司已經(jīng)認(rèn)識到PM的重要性 作為成功因素,因此也是未來業(yè)務(wù)的機(jī)會 不僅僅是在服務(wù)區(qū)。PM的技術(shù)可行性很大程度上 鑒于,盡管存在極端挑戰(zhàn),特別是在數(shù)據(jù)領(lǐng)域 分析學(xué)。然而,PM目前正被相當(dāng)機(jī)會主義地驅(qū)動。 預(yù)計(jì)未來商業(yè)模式將主要由 軟件組件和硬件的增值份額將相繼 減少。總之,對硬件和軟件的投資 因?yàn)镻M今天已經(jīng)是值得的,因?yàn)橛纱水a(chǎn)生的更高產(chǎn)量 機(jī)器運(yùn)行時間更長。
審核編輯:郭婷
-
傳感器
+關(guān)注
關(guān)注
2553文章
51391瀏覽量
756593 -
mems
+關(guān)注
關(guān)注
129文章
3958瀏覽量
191100 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9081瀏覽量
146371
發(fā)布評論請先 登錄
相關(guān)推薦
未來維修服務(wù)對傳感器的需求:用于實(shí)施狀態(tài)監(jiān)控的智能傳感器
傳感器在智能電網(wǎng)中的應(yīng)用
智能機(jī)器人對于傳感器的需求
淺析環(huán)境對傳感器造成的影響
工業(yè)自控流程對傳感器的不同需求
物聯(lián)網(wǎng)應(yīng)用中對傳感器及MCU的要求
不同行業(yè)對傳感器技術(shù)的需求
傳感器技術(shù)在智能設(shè)備中的應(yīng)用與分析
用于先進(jìn)駕駛輔助系統(tǒng)和自主駕駛的集成智能傳感器健康監(jiān)測裝置概述
集成多元化傳感器將成為未來傳感器發(fā)展新趨勢
傳感器的璀璨未來
智能傳感器未來發(fā)展空間如何?附兩款奧松傳感器
對未來維修傳感器的要求:用于狀態(tài)監(jiān)測的智能傳感器
未來維修服務(wù)對傳感器的需求:用于實(shí)施狀態(tài)監(jiān)控的智能傳感器

用于實(shí)施狀態(tài)監(jiān)控的智能傳感器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論