 數字鎖相環基礎知識
數字鎖相環基礎知識
鎖相環的一些概念
1、捕獲、鎖定與跟蹤的概念
捕獲,是指從輸入信號加到鎖相環輸入端開始開始,一直到環路達到鎖定的全過程。
鎖相環的鎖定是指鎖相環的輸出頻率等于輸入頻率,而輸出信號的相位跟隨輸入信號的變化而變化。
跟蹤是指鎖相環鎖定后的狀態,一旦鎖相環進入鎖定狀態,若輸入信號產生了相位的變化,環路就調整壓控振蕩器的控制電壓使得其輸出信號的相位跟隨輸入信號的相位變化,即保持恒定的穩態相位差。這種狀態稱為跟蹤或同步狀態。
2、捕獲時間和穩態相差
捕獲時間是指捕獲過程所需的時間。捕獲時間的大小不僅與環路參數有關,而且與起始狀態有關。
當環路進入同步狀態之后,環內被控振蕩器的振蕩器頻率已經等于輸入信號的頻率,兩者之間只差一個固定的相位。這個相位差稱為穩態相差。反過來說,若穩態相差為一個常數或等于0,則說明環路處于鎖定狀態。
3、相位捕獲和頻率捕獲
“相位捕獲”指在捕獲過程中,相位沒有經過2π的周期跳躍就能進入的鎖定狀態,即捕獲過程小于一個2π周期的捕獲過程稱為相位捕獲,又稱快捕獲。“頻率捕獲”指捕獲經歷一個以上的頻率周期的捕獲過程。即意味著環路的輸入信號頻率與輸出信號頻率在開始捕獲前相差至少一個周期。一般來說,一個鎖相環從捕獲到鎖定都要經歷從頻率捕獲到相位捕獲兩個過程。
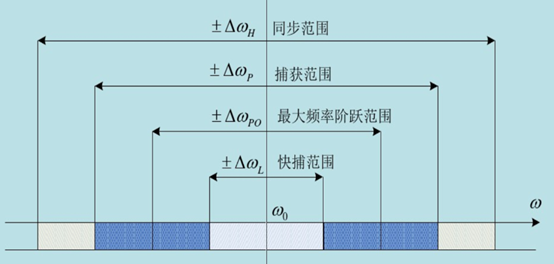
如下圖的快捕范圍就是快捕帶,只有相位捕獲,因此收斂較快,而除快捕范圍的捕獲帶則首先要進行頻率捕獲,然后才是相位捕獲。頻率捕獲相對來說是一個慢的過程,因此收斂較慢。
4、捕獲帶和同步帶
捕獲帶是指保證環路必然進入鎖定的最大固有頻差值。換句話說,就是在保證環路不出現穩定的差拍狀態所允許的最大固有頻差值。
一旦環路進入鎖定狀態,系統就處于跟蹤狀態。隨著輸入信號的頻率和相位的變化,環路應該始終能跟蹤其變化,但一旦輸入信號的頻率與被控壓控振蕩器的自由振蕩器頻率相差太多,環路就會失去跟蹤能力,這種狀態稱為“失鎖”。
同步帶是指系統保持同步的最大固有頻差值
5、最大頻率階躍范圍
描述PLL對于穩定工作狀態的動態限制。環路初始處于鎖定狀態,當輸入信號的頻率發生階躍變化的幅度在失鎖帶的范圍之內,環路能夠保持鎖定。然而,當輸入信號的頻率發生階躍變化的幅度超出失鎖帶的范圍,環路不能保持鎖定,輸出信號無法跟蹤輸入參考信號。當然,通過緩慢的捕獲過程,環路可再次入鎖。
1、捕獲、鎖定與跟蹤的概念
捕獲,是指從輸入信號加到鎖相環輸入端開始開始,一直到環路達到鎖定的全過程。
鎖相環的鎖定是指鎖相環的輸出頻率等于輸入頻率,而輸出信號的相位跟隨輸入信號的變化而變化。
跟蹤是指鎖相環鎖定后的狀態,一旦鎖相環進入鎖定狀態,若輸入信號產生了相位的變化,環路就調整壓控振蕩器的控制電壓使得其輸出信號的相位跟隨輸入信號的相位變化,即保持恒定的穩態相位差。這種狀態稱為跟蹤或同步狀態。
2、捕獲時間和穩態相差
捕獲時間是指捕獲過程所需的時間。捕獲時間的大小不僅與環路參數有關,而且與起始狀態有關。
當環路進入同步狀態之后,環內被控振蕩器的振蕩器頻率已經等于輸入信號的頻率,兩者之間只差一個固定的相位。這個相位差稱為穩態相差。反過來說,若穩態相差為一個常數或等于0,則說明環路處于鎖定狀態。
3、相位捕獲和頻率捕獲
“相位捕獲”指在捕獲過程中,相位沒有經過2π的周期跳躍就能進入的鎖定狀態,即捕獲過程小于一個2π周期的捕獲過程稱為相位捕獲,又稱快捕獲。“頻率捕獲”指捕獲經歷一個以上的頻率周期的捕獲過程。即意味著環路的輸入信號頻率與輸出信號頻率在開始捕獲前相差至少一個周期。一般來說,一個鎖相環從捕獲到鎖定都要經歷從頻率捕獲到相位捕獲兩個過程。
如下圖的快捕范圍就是快捕帶,只有相位捕獲,因此收斂較快,而除快捕范圍的捕獲帶則首先要進行頻率捕獲,然后才是相位捕獲。頻率捕獲相對來說是一個慢的過程,因此收斂較慢。
4、捕獲帶和同步帶
捕獲帶是指保證環路必然進入鎖定的最大固有頻差值。換句話說,就是在保證環路不出現穩定的差拍狀態所允許的最大固有頻差值。
一旦環路進入鎖定狀態,系統就處于跟蹤狀態。隨著輸入信號的頻率和相位的變化,環路應該始終能跟蹤其變化,但一旦輸入信號的頻率與被控壓控振蕩器的自由振蕩器頻率相差太多,環路就會失去跟蹤能力,這種狀態稱為“失鎖”。
同步帶是指系統保持同步的最大固有頻差值
5、最大頻率階躍范圍
描述PLL對于穩定工作狀態的動態限制。環路初始處于鎖定狀態,當輸入信號的頻率發生階躍變化的幅度在失鎖帶的范圍之內,環路能夠保持鎖定。然而,當輸入信號的頻率發生階躍變化的幅度超出失鎖帶的范圍,環路不能保持鎖定,輸出信號無法跟蹤輸入參考信號。當然,通過緩慢的捕獲過程,環路可再次入鎖。
鑒相器
關于鑒頻器介紹一下2種鑒頻器:
鑒頻器1,二象限反正切函數,
優點:最準確的鑒相方法,實際相位差異位于-90°至+90°的范圍之內時,該鑒相器的工作保持線性,并且其輸出的鑒相結果與信號幅值無關。
缺點:需要進行反正切求值,因而它也是計算量最大的一種。
鑒頻器2
優點:計算量小, 適合純邏輯實現
缺點:鑒頻近似準確,鑒相結果與成正比,并且與信號幅值有關 環路濾波器 和 頻率可變振蕩器 與鎖頻環一樣,不在重復敘述
Matlab 程序
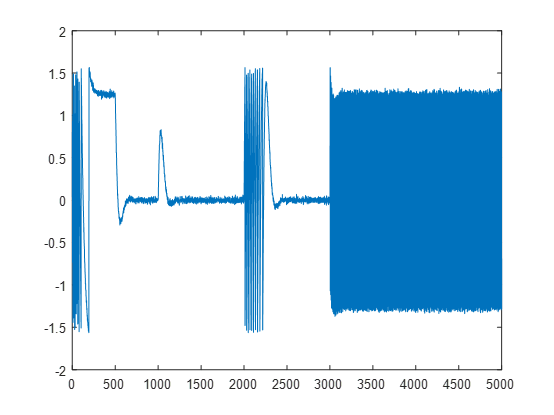
在鎖頻環的程序基礎上添加鎖相環,設定前面500ms是鎖頻環工作,將頻率快速的拉到接近的范圍,然后切換到鎖相環,期間在1s的時候頻率突變10Hz,在2s的時候突變30Hz,在3s的時候突變100Hz,來理解快捕范圍,頻率階躍、捕獲帶等這些概念。為了顯示更加清楚,這里就不加碼元信息了
format long g; clc;clear all;close all SampleClk = 4.1e6; PointNum = SampleClk*5;IF = 1e6- 240 ; Carr_cos(1:SampleClk) = cos(2*pi*(IF/SampleClk).*[1:SampleClk] + 0);Carr_sin(1:SampleClk) = sin(2*pi*(IF/SampleClk).*[1:SampleClk] + 0);IF = IF + 10;Carr_cos(1+SampleClk:PointNum) = cos(2*pi*(IF/SampleClk).*[SampleClk+1:PointNum] + 0);Carr_sin(1+SampleClk:PointNum) = sin(2*pi*(IF/SampleClk).*[SampleClk+1:PointNum] + 0);IF = IF + 30;Carr_cos(1+2*SampleClk:PointNum) = cos(2*pi*(IF/SampleClk).*[2*SampleClk+1:PointNum] + 0);Carr_sin(1+2*SampleClk:PointNum) = sin(2*pi*(IF/SampleClk).*[2*SampleClk+1:PointNum] + 0);IF = IF + 100;Carr_cos(1+3*SampleClk:PointNum) = cos(2*pi*(IF/SampleClk).*[3*SampleClk+1:PointNum] + 0);Carr_sin(1+3*SampleClk:PointNum) = sin(2*pi*(IF/SampleClk).*[3*SampleClk+1:PointNum] + 0); signal0 = Carr_cos +j*Carr_sin;data = awgn(signal0,-5,'measured'); n = SampleClk/1000; num=1000;a=rand(1,num);a(a>0.5)=1;a(a<=0.5)=-1; % for m = 1 1000% data(m*n+1:(m + 1)*n) = a(m)*data(m*n+1:(m + 1)*n);% end fc = 1e6;n = SampleClk/1000; nf = floor(length(data)/n); FAccCarReg0 = 0;PAccCarReg0 = 0;frame = 0; FLL_BL = 100;PLL_BL = 20;tc1 = 1/1000;k1 = 1; [d0,d1] = Fil2ndPara(k1,FLL_BL,tc1);[c0,c1] = Fil2ndPara(k1,PLL_BL,tc1); df(1:nf) = 0;df1(1:nf) = 0; PQaccu = 0;PIaccu = 0; fll = 0;pll = 0;carr_accu = 0; counter = 1; init_carr_freq = fc; for frame = 1 : nf % frame carr_freq = init_carr_freq + fll + pll; for clk = 0 : n-1 %clk carr_accu = rem(carr_accu,1); cosine = cos(2*pi*(carr_accu)); sine = sin(2*pi*(carr_accu)); baseband = (data(((frame-1)*n+clk+1))).*(cosine -j*sine); PI_clk = real(baseband); PQ_clk = imag(baseband); PQaccu = PQaccu + PQ_clk; PIaccu = PIaccu + PI_clk; carr_accu = carr_accu + carr_freq/SampleClk; end PQ(frame) = PQaccu; PI(frame) = PIaccu; if PI(frame) == 0 PI(frame) = 0.0000001; end PQaccu = 0; PIaccu = 0; if frame <5? fll = 0; pll = 0; elseif(frame <500 ) df(frame) = FrqErr(PI,PQ,frame); [fll,FAccCarReg0] = Fil2nd(d0,d1,FAccCarReg0,df(frame)); else df1(frame) = PhaErr(PI,PQ,frame); [pll,PAccCarReg0] = Fil2nd(c0,c1,PAccCarReg0,df1(frame)); end fll_frame(frame) = fll + pll; end figure(1)plot(fll_frame); figure(4)plot(PI);hold onplot(PQ);hold on figure(5)plot(atan(PQ./PI))
關于鑒頻器介紹一下2種鑒頻器:
鑒頻器1,二象限反正切函數,
優點:最準確的鑒相方法,實際相位差異位于-90°至+90°的范圍之內時,該鑒相器的工作保持線性,并且其輸出的鑒相結果與信號幅值無關。
缺點:需要進行反正切求值,因而它也是計算量最大的一種。
鑒頻器2
優點:計算量小, 適合純邏輯實現
缺點:鑒頻近似準確,鑒相結果與成正比,并且與信號幅值有關 環路濾波器 和 頻率可變振蕩器 與鎖頻環一樣,不在重復敘述
Matlab 程序
在鎖頻環的程序基礎上添加鎖相環,設定前面500ms是鎖頻環工作,將頻率快速的拉到接近的范圍,然后切換到鎖相環,期間在1s的時候頻率突變10Hz,在2s的時候突變30Hz,在3s的時候突變100Hz,來理解快捕范圍,頻率階躍、捕獲帶等這些概念。為了顯示更加清楚,這里就不加碼元信息了
format long g; clc;clear all;close all SampleClk = 4.1e6; PointNum = SampleClk*5;IF = 1e6- 240 ; Carr_cos(1:SampleClk) = cos(2*pi*(IF/SampleClk).*[1:SampleClk] + 0);Carr_sin(1:SampleClk) = sin(2*pi*(IF/SampleClk).*[1:SampleClk] + 0);IF = IF + 10;Carr_cos(1+SampleClk:PointNum) = cos(2*pi*(IF/SampleClk).*[SampleClk+1:PointNum] + 0);Carr_sin(1+SampleClk:PointNum) = sin(2*pi*(IF/SampleClk).*[SampleClk+1:PointNum] + 0);IF = IF + 30;Carr_cos(1+2*SampleClk:PointNum) = cos(2*pi*(IF/SampleClk).*[2*SampleClk+1:PointNum] + 0);Carr_sin(1+2*SampleClk:PointNum) = sin(2*pi*(IF/SampleClk).*[2*SampleClk+1:PointNum] + 0);IF = IF + 100;Carr_cos(1+3*SampleClk:PointNum) = cos(2*pi*(IF/SampleClk).*[3*SampleClk+1:PointNum] + 0);Carr_sin(1+3*SampleClk:PointNum) = sin(2*pi*(IF/SampleClk).*[3*SampleClk+1:PointNum] + 0); signal0 = Carr_cos +j*Carr_sin;data = awgn(signal0,-5,'measured'); n = SampleClk/1000; num=1000;a=rand(1,num);a(a>0.5)=1;a(a<=0.5)=-1; % for m = 1 1000% data(m*n+1:(m + 1)*n) = a(m)*data(m*n+1:(m + 1)*n);% end fc = 1e6;n = SampleClk/1000; nf = floor(length(data)/n); FAccCarReg0 = 0;PAccCarReg0 = 0;frame = 0; FLL_BL = 100;PLL_BL = 20;tc1 = 1/1000;k1 = 1; [d0,d1] = Fil2ndPara(k1,FLL_BL,tc1);[c0,c1] = Fil2ndPara(k1,PLL_BL,tc1); df(1:nf) = 0;df1(1:nf) = 0; PQaccu = 0;PIaccu = 0; fll = 0;pll = 0;carr_accu = 0; counter = 1; init_carr_freq = fc; for frame = 1 : nf % frame carr_freq = init_carr_freq + fll + pll; for clk = 0 : n-1 %clk carr_accu = rem(carr_accu,1); cosine = cos(2*pi*(carr_accu)); sine = sin(2*pi*(carr_accu)); baseband = (data(((frame-1)*n+clk+1))).*(cosine -j*sine); PI_clk = real(baseband); PQ_clk = imag(baseband); PQaccu = PQaccu + PQ_clk; PIaccu = PIaccu + PI_clk; carr_accu = carr_accu + carr_freq/SampleClk; end PQ(frame) = PQaccu; PI(frame) = PIaccu; if PI(frame) == 0 PI(frame) = 0.0000001; end PQaccu = 0; PIaccu = 0; if frame <5? fll = 0; pll = 0; elseif(frame <500 ) df(frame) = FrqErr(PI,PQ,frame); [fll,FAccCarReg0] = Fil2nd(d0,d1,FAccCarReg0,df(frame)); else df1(frame) = PhaErr(PI,PQ,frame); [pll,PAccCarReg0] = Fil2nd(c0,c1,PAccCarReg0,df1(frame)); end fll_frame(frame) = fll + pll; end figure(1)plot(fll_frame); figure(4)plot(PI);hold onplot(PQ);hold on figure(5)plot(atan(PQ./PI))
從頻率跟蹤圖可以明顯的看出在500ms鎖頻環轉鎖相環的時候,誤差頻率很小,因此處于快捕帶,只需要對相位進行捕獲,收斂很快。在1s的時候,頻率突變10Hz,環路仍然保持鎖定,很快便調整到了正確的頻率,因此10Hz屬于最大階躍范圍內,2s的時候,頻率突變30Hz,很明顯的頻率出現了震蕩,這就是失鎖了,但仍處于捕獲帶內,因此花了一點時間又重新鎖定到正確的頻率上,最后,頻率突變100Hz,則直接跳出了捕獲帶之外,無法重新鎖定了。 從I/Q幅度圖以及鑒相值可以看出在500ms和1s的時候,相位沒有出現2*pi的翻轉,而在2s的時候出現了多次的2pi的翻轉,這也印證了最開始介紹鎖相環的概念中的 頻率捕獲和相位捕獲的內容。IQ幅度圖:
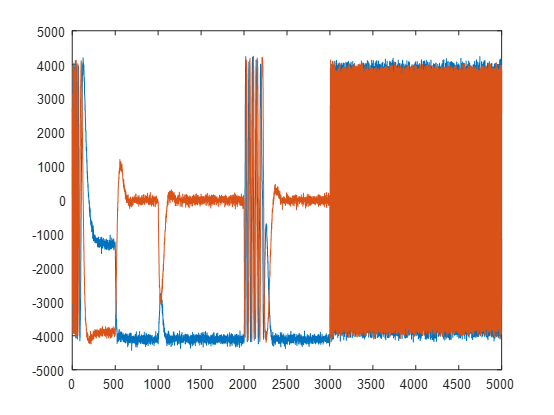
鑒相值圖:
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
鎖相環
+關注
關注
35文章
590瀏覽量
87893 -
鑒頻器
+關注
關注
1文章
27瀏覽量
33211
原文標題:FPGA學習-數字鎖相環
文章出處:【微信號:FPGA研究院,微信公眾號:FPGA研究院】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
鎖相環是什么意思
鎖相環(Phase-Locked Loop,簡稱PLL)是一種廣泛應用于電子系統中的反饋控制系統,主要用于頻率合成和相位同步。本文將從鎖相環的工作原理、基本組成、應用案例以及設計考慮等方面進行詳細闡述,以幫助讀者全面理解這一重要技術。
AN-1420:利用數字鎖相環(DPLL)實現相位增建和無中斷切換
電子發燒友網站提供《AN-1420:利用數字鎖相環(DPLL)實現相位增建和無中斷切換.pdf》資料免費下載
發表于 01-13 14:07
?0次下載

可編程晶振的鎖相環原理
鎖相環(Phase-LockedLoop,PLL)是一個能夠比較輸出與輸)入相位差的反饋系統,利用外部輸入的參考信號控制環路內部振蕩信號的頻率和相位,使振蕩信號同步至參考信號。而鎖相環
鎖相環PLL在無線電中的應用 鎖相環PLL與模擬電路的結合
鎖相環PLL在無線電中的應用 1. 頻率合成 在無線電通信中,頻率合成是生成所需頻率信號的關鍵技術。鎖相環可以用于生成穩定的頻率輸出,這對于調制和解調過程至關重要。通過調整PLL的參考頻率和反饋路徑
鎖相環PLL的工作原理 鎖相環PLL應用領域
鎖相環(Phase-Locked Loop,簡稱PLL)是一種電子電路,它能夠自動調整輸出信號的相位,使其與輸入信號的相位同步。這種電路在電子工程領域有著廣泛的應用,特別是在頻率合成、時鐘恢復、調制
數字鎖相環固有的相位抖動是怎樣產生的,如何解決
數字鎖相環(DPLL)固有的相位抖動主要來源于多個方面,這些抖動因素共同影響著鎖相環的同步精度和穩定性。以下是數字鎖相環相位抖動產生的主要原
數字鎖相環提取位同步信號怎么設置
數字鎖相環(DPLL)提取位同步信號的設置涉及多個關鍵步驟和組件的配置。以下是一個概括性的設置流程,以及各個步驟中需要注意的關鍵點:
簡述鎖相環的基本結構
鎖相環(Phase-LockedLoop, PLL),是一種反饋控制電路,電子設備正常工作,通常需要外部的輸入信號與內部的振蕩信號同步,利用鎖相環路就可以實現這個目的,它可用來從固定的低頻信號生成穩定的輸出高頻信號。
鎖相環和鎖相放大器的區別
鎖相環(Phase-Locked Loop, PLL)和鎖相放大器(Lock-in Amplifier)是兩種在電子學和信號處理領域廣泛應用的技術,它們各自具有獨特的工作原理、組成結構以及應用場景。以下將從定義、組成、工作原理、性能特點及應用領域等方面詳細闡述
鎖相環相位噪聲的影響因素
鎖相環(Phase Locked Loop, PLL)相位噪聲是評估鎖相環性能的重要指標之一,它描述了輸出信號相位的不穩定性。相位噪聲的存在會直接影響系統的性能,如降低信號的信噪比、增加誤碼率、影響雷達系統的目標分辨能力等。以下將詳細分析
鎖相環的工作原理和應用場景
鎖相環是一種利用相位同步產生的電壓,去調諧壓控振蕩器(Voltage Controlled Oscillator, VCO)以產生目標頻率的負反饋控制系統。它基于自動控制原理,通過外部輸入的參考信號

倍頻器與鎖相環的區別
在電子和通信領域,倍頻器和鎖相環(PLL)是兩種常見的電路結構,它們在信號處理、頻率合成和通信系統中扮演著重要角色。盡管兩者在某些方面存在相似之處,但它們在功能、工作原理和應用領域等方面存在顯著差異。本文將對倍頻器和鎖相環進行詳細的比較和分析,以揭示它們之間的區別。
鎖相環的基本原理和主要作用
鎖相環(Phase Locked Loop,簡稱PLL)是一種在電子系統中廣泛應用的負反饋控制系統,其主要作用是實現輸入信號與輸出信號之間的相位同步。在現代通信、雷達、導航、測量等領域,鎖相環都發





 工商網監
工商網監
評論