 激光雷達的正確使用方法 2
激光雷達的正確使用方法 2
2)選擇合適的安裝位置與數量
目前,激光雷達上裝的具體位置存在很大的差異,比如車頂上方、車前燈兩側、車尾等。那具體裝在哪個位置合適以及裝多少顆?如何做設備的后期維護?這些問題都是要考量的。
第一,一定程度上保證整體美觀度。 美觀的整體外形設計與產品自身的造型是首要的考慮因素。
激光雷達前裝量產的首要條件,一定是要保證車輛的外觀設計。某L4自動駕駛企業產品經理憑借其多年在主機廠的從業經驗說道:“主機廠地位很強勢,對造型的要求也很高,激光雷達安裝的位置是由設計部和研發部協商的結果。”
除了保證車輛的整體外觀設計外,由于每款激光雷達產品的造型不同,致使可供安裝的位置也有不同。這位產品經理繼續說道:“每家激光雷達廠商的產品形狀、大小都是不同的,比如速騰的M1安裝在前擋風玻璃上方會更好。但如果前擋風玻璃上方沒有相應的域控制器的話,那這個位置也不允許安裝,或許會安放在車前燈下方兩側。”
從現存的激光雷達上裝情況來看,安裝在車頂上方的激光雷達,其形狀普遍具備長而扁的特征,這類形狀更適合安裝在車前擋上方,比如Luminar Iris這款產品體積足夠小,更易于集成在車前擋上方。安裝在車前燈兩側或者保險杠中部的激光雷達,體積相對較大(尤其是高度較高),比如大疆的HAP,若是安裝在車前擋上方,容易破壞車輛整體的美觀度,所以更適合安裝在車前燈兩側。
表:部分激光雷達的代表車型和安裝位置
| 激光雷達產品 | 代表車型(安裝位置) | |
|---|---|---|
| Luminar(Iris) | 上汽R7(車前擋上方) | |
| 大疆(HAP) | 小鵬P5(車前燈兩側下方各1個) | |
| 圖達通(獵鷹) | 蔚來ET7(車前擋上方) | |
| 華為(96線中長距) | 極狐阿爾法(保險杠的中部以及兩側各1個) | |
| 速騰聚創(M1) | 小鵬G9(車前燈兩側下方各1個) | |
| 資料來源:公開信息整理 |
第二,不同位置實現不同功能。 從功能的角度來說,安裝在車前擋上方位置可以兼做感知和定位,而車前燈下方兩側的位置則更適合感知功能。
智加科技中國首席科學家崔迪瀟解釋道:“裝在什么位置,具體是看做什么功能。如果是要做感知,放在車前燈下方兩側位置更合適。如果是做定位,放在車前擋最上面會更好。
放在最上面的激光雷達會看得更高更遠,但這是一個相對的概念,取決于算法的需求。例如感知算法通常更關注路面上的動態交通參與者,某些定位算法更關注路面之外的建筑物,兩類算法的要求可以通過激光的不同安裝來分別滿足。”
探維科技品牌總監張立辰繼續補充道:“激光雷達安裝在車前燈下方的位置,主要功能是補充或輔助性避障,但下方的位置存在無法避免的盲區問題。而上方的位置可以是感知功能也可以是定位功能,但定位功能需要360°的信息,單顆半固態激光雷達必然不能實現定位功能。”
結合兩位專家的觀點,筆者認為,激光雷達放在下方的話,兩顆激光雷達覆蓋的感知范圍也較大,其感知功能相對較強,可以更適合多變、復雜的城區場景;而放在上方的話,普遍是單顆激光雷達,市場上的普遍水平視場角在120°,可覆蓋的感知范圍必然不會比下方廣,但上方的激光雷達產品主要是1550nm的遠距離產品(比如Luminar的Iris或者圖達通的獵鷹),視線能看得更遠,更適合高速場景。
第三,場景需求決定安裝數量。 安裝激光雷達的數量取決于需要滿足的感知范圍和場景功能。
越來越多的車輛開始上裝激光雷達,有些車輛甚至多達4顆,那一輛自動駕駛車輛上到底需要安裝多少顆激光雷達?對此,智加科技中國首席科學家崔迪瀟解釋道:“因為激光雷達自身的原理特性,所以導致了它無法做到所有的功能。那么單個激光雷達在使用過程中無法實現多個功能,只有通過多個激光雷達才可以把自動駕駛車輛需要的功能全部覆蓋。這也就是為什么高階的自動駕駛功能需要裝這么多的激光雷達,甚至有些堆了四個激光雷達。”
從這一點上,筆者也在思考:是不是裝的越多越好?而在這種趨勢下,會不會引起激光雷達數量的軍備競賽?均勝電子副總裁郭繼舜解釋道:“在成本允許的前提下,安裝激光雷達必然能夠提升系統穩定性和自動駕駛的安全性,至于裝多少顆,主要取決于需要增加的具體功能。至于軍備競賽的說法,現階段遠遠還沒有來臨。哪怕軍備競賽真的到來,規模化也會帶來成本的下降。”
總的來說,一款激光雷達無論裝在車前后四角還是車頂,單顆激光雷達都無法滿足車輛安全行駛的要求。出于這點考慮,市場上大部分中短距離激光雷達都是安裝2個及以上,以求獲得更廣的視野范圍,并且主要是前向方向。
對此,某L4自動駕駛公司資深從業者解釋道:“大家都在做前裝量產,所以才盡可能拋棄機械式激光雷達,而做一些內嵌式的激光雷達。但是內嵌式的激光雷達水平視場角必然不會達到360°,比如大疆的HAP和速騰的M1,水平視場角都為120°,相對機械式的激光雷達來說,它們的視場角很小,所以使得車輛需要裝多個激光雷達。”
第四,做好后期維護。 從后期的維護角度來說,安裝在不同位置實現清洗、防撞、熱管理等功能的難易度不同。
安裝在上方,好處是易清洗、防撞,但不易做熱管理。裝在車燈下方的位置的話,最大的缺點是容易被撞,一旦被撞設備幾乎無法維修,而更換的成本會很高。也有一些車企選擇裝在車燈附近的進氣格柵內,總體來看,這是最不理想的位置,容易被撞,還不容易清洗。
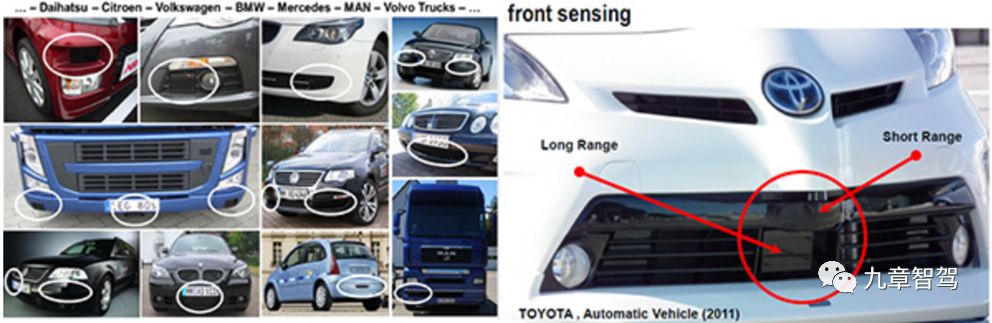
圖:部分車型中進氣格柵的安裝位置
(圖片來源:公開信息)
3)優化工作時間、降低功耗,提升設備耐久性
上文中也提到了激光雷達的耐久性問題比較突出,但可以從優化工作時間與降低功耗兩個角度,提升激光雷達的耐久性,減少維修和更換的成本。
首先,對于乘用車來說,可以在非工作時間內讓設備“休息”,提升設備的耐久性。
某自動駕駛初創企業產品經理說道:“商用車的激光雷達使用壽命相對乘用車來說會更短,因為工作時長的原因,激光雷達需要始終保持運行狀態。但乘用車并不需要24小時全天候的工作,可以有效地降低激光雷達使用時間,在某個不需要激光雷達場景的條件下,可以適當的關閉激光雷達,通過電源管理的方式,實現使用時間的優化。”
其次,從軟硬件兩個角度,降低激光雷達的功耗問題。
從硬件的角度來看,探維科技品牌總監張立辰告訴《九章智駕》:“后裝市場的話,通過改善外殼材質、顏色、體積、或加裝排熱風扇的方式,改善功耗問題;前裝市場的話,主要依靠主機廠或者tier 1去設計激光雷達產品的體積和安裝位置,從而改善功耗問題。”
從軟件的角度來看,某傳感器行業專家提道:“可以通過優化芯片架構、優化算法的方式降低功耗。”
優化工作時間和降低功耗是提升激光雷達耐久性的最基礎的方式,除此以外,熱管理功能也會是提升功耗的一種方式,但熱管理主要是針對極端環境而言,并不是一個共性問題。
4)提高不同場景下的數據采集效率
提高激光雷達的數據采集效率,減少重復區域內的數據采集工作,關注更有價值的數據。
某自動駕駛初創企業產品經理說道:“如果車輛一直在某一個相同區域內行駛,數據的重復度會比較高,無用的數據就會過多,最終只能得到重復累加的數據。相對于此,更應該搜集算法遇到問題時候的數據,比如在這前后十分鐘或者五分鐘的數據,這類稀缺的數據是對算法訓練最有價值的數據。”
筆者認為能做到高效的數據采集,首先是場景的選擇,比如高速場景下采用ROI功能,動態調整激光雷達的角分辨率,將感知區域集中在車輛前方,增加前方重點區域的點云密度;其次是激光雷達自身算法的優化,通過不斷地數據積累,過濾掉工況下的重復信息。
5) 配合短距激光雷達會更好
筆者發現當前市場上新推出了多款短距激光雷達,從市場上現已公布的一些產品數據來看,短距激光雷達覆蓋了各種不同的掃描技術路線,包括MMT、Flash、機械式,主要的特點是測距相對較短,一般為50米范圍以內。
這不禁讓筆者產生了一個思考,為何需要短距激光雷達?在如此短的距離內,短距激光雷達的主要優勢是什么?
表:部分短距激光雷達產品信息整理
| 性能參數 | 激光雷達供應商/產品名 |
|---|---|
| Cepton-Nova | XenomatiX-短距 |
| 激光光源 | 905nm |
| 掃描方式 | MMT |
| 探測距離 | 30米@10%反射率 |
| FOV | 120°*90° |
| 角分辨率 | 0.3°*0.3° |
| 點云密度 | — |
| 功率 | <3.5W |
| 點頻 | — |
| 資料來源:公開信息整理 |

圖:QT128探測動態運動的乒乓球
(圖片來源:https://mp.weixin.qq.com/s/ciV0BqYNgKahEfdXtQjHeA)
智加科技中國首席科學家崔迪瀟介紹說:“短距激光雷達的使用與場景有一定相關性,主要是用于相對低速的環境下。要實現高階的自動駕駛功能,就必須依靠更多種類的激光雷達。
有些場景下可能只有兩層冗余,這必然不能滿足高階自動駕駛的冗余需求,所以才會有了短距激光雷達。從功能上來說,短距激光雷達有效覆蓋范圍只有50米,所以它對定位不一定有用,只有補盲作用。”
除了激光雷達主要的探距功能外,短距激光雷達主要是起到了補盲雷達的作用,通常安裝在車頭、車前后四角、左右兩側等位置。
但如果只是補盲的話,為何不直接采用攝像頭或者毫米波雷達?
某自動駕駛資深從業者解釋道:“短距激光雷達功率相對較小,成本也會較低。比如在泊車環境下,單目攝像頭的深度信息相對較弱,但通過短距的激光雷達可以補充這些深度信息,能幫助車輛獲取與障礙物的距離信息,這是它的重要功能之一。”
綜合來看,短距激光雷達具備低成本、低功率、寬視場角等特征。相比于長距激光雷達而言,短距激光雷達需要解決的并不是更遠處的場景,而是近處的場景,比如在城區環境下,車輛往往只處于低速環境下,并不需要特別關心150米甚至200米以外的環境信息。
相比于其他傳感器,短距激光雷達對于近處的補盲效果會更好,既彌補了毫米波對于金屬的不夠敏感,也彌補了視覺對于光照的影響,同時短距雷達的位置,一般也會覆蓋攝像頭的感知范圍,可以實現多傳感器的融合異構方案。
結語:
激光雷達前裝量產后,使用過程中暴露出的問題也慢慢浮出水面。第一,統一的車規級標準是激光雷達亟須解決的首要問題;第二,在一些特定場景下,如雨霧雪等氣候環境下或者重復性較高的場景下,激光雷達的使用效果會大打折扣;第三,激光雷達在使用層面,產品的耐久性和可靠性問題也很突出,無法覆蓋產品承諾的生命周期;第四,激光雷達廠商的售后服務體系也尚未成熟,現有的售后服務水平很難滿足行業后期的大規模量產;第五,未來的環境安全問題也值得重視,尤其是在激光相互對射的串擾與人眼安全兩方面。
此外,筆者以一個使用者的角度總結了正確使用激光雷達的方法:第一,是需要選擇合適的產品和激光雷達廠商,包括產品是否符合車規要求、激光雷達廠商是否具備完善的售后服務等;
第二,選擇合適的安裝位置與數量,包括安裝在不同位置主要的影響因素、安裝數量與場景和需要實現的功能之間的聯系等;
第三,通過優化工作時間、降低功耗,從而提升產品耐久性,增加產品的生命周期;第四,通過動態調整角分辨率的方式,實現ROI功能,提高某些場景下的數據采集效率,比如高速場景下,可以重點關注車前方的行駛區域;第五,可以嘗試安裝短距激光雷達,其具備低成本、低功率、寬視場角等特征,同時可為車輛提供補盲的作用。
激光雷達使用過程中存在的問題可能不止上述5點,隨著滲透率的逐步提升,相關問題也會慢慢呈現出來。但筆者相信,國內自動駕駛行業正在加快發展步伐,而激光雷達已成為高階自動駕駛車輛必不可少的關鍵傳感器之一。
參考文獻
【1】深度|智能駕駛:激光雷達成為L3/L4焦點,自動駕駛顯現千億新藍海
https://mp.weixin.qq.com/s/9RdwCG3qf9hE3X5wiiy_QA
【2】golang+webgl實踐激光雷達(一)激光掃描儀基礎知識
https://www.cnblogs.com/laofenmao/p/12052290.html
【3】激光雷達波長:905nm VS1550nm
https://www.cmpe360.com/p/120214
【4】激光對人眼的損傷分析,李強 何炳陽
-
激光雷達
+關注
關注
968文章
4026瀏覽量
190409 -
自動駕駛
+關注
關注
785文章
13931瀏覽量
167008 -
大疆
+關注
關注
30文章
906瀏覽量
82226
發布評論請先 登錄
相關推薦
空間激光雷達最小接收光功率的計算
激光雷達分類以及應用
常見激光雷達種類
激光雷達面臨的機遇與挑戰
消費級激光雷達的起航
固態設計激光雷達
激光雷達除了可以激光測距外,還可以怎么應用?
機器人和激光雷達都不可或缺
TOF激光雷達
激光雷達知多少:從技術上講講未來前景
由iphone12說說激光雷達 FMCW激光雷達 精選資料分享
激光雷達的正確使用方法 1





 工商網監
工商網監
評論