 可食用!您胃中的機器人和AI
可食用!您胃中的機器人和AI
這篇文章來源于DevicePlus.com英語網站的翻譯稿。
可食用折疊機器人膠囊以及可展開折疊裝置;照片:Melanie Gonick/MIT
MIT、謝菲爾德大學和東京工業大學的研究人員在醫療機器人領域實現技術創新,合作研發出了一種可食用折疊機器人。該機器人經過患者消化道時可以實現遠程控制。
MIT計算機科學與人工智能實驗室(CSAIL)教授Daniela Rus博士表示,“最大的挑戰是如何構建一種臨床安全且有能力的醫療機器人。解決這個問題需要尋找生物相容性材料、安全的體內運輸方式、將機器人從藥丸形狀重新展開的方法,以及對機器人位置和功能的精確多模式控制。”
可食用折疊機器人概述
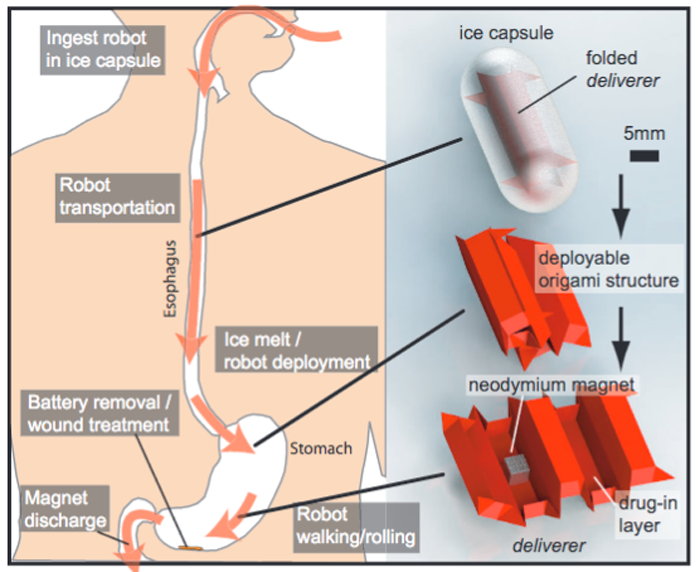
首先,將機器人折疊成折紙形狀,然后將其裝入27mm的冰囊中,讓患者服用。機器人藥丸穿過食道和胃之后,周圍的冰融化。
研發人員憑借超聲波、X射線和霍爾效應傳感器的組合對機器人進行地理定位。
機器人在這里展開。折疊機器人的運動方式有多種:基于摩擦的推進(折疊形狀造成的結果);胃液的水基推進;以及磁場軌跡控制。
White Rose研究論文,利茲大學,Sheffield & York
機器人的三種運動方式
第一種運動是使用磁力。折疊機器人的一塊褶皺板內嵌了一個長3.2mm的釹磁鐵。該磁鐵能夠對體外磁場做出反應,因此研發人員可以操縱機器人的軌跡。
遙控操縱桿能夠產生旋轉磁力,快速旋轉可以使機器人旋轉到位,但較慢的旋轉會讓機器人繞其中一個固定腳旋轉。
第二種運動就是研究人員所說的“粘滑”運動。褶皺板的形狀和結構使得這種運動成為可能。機器人的邊緣通過摩擦力附著在一個表面上,當其身體彎曲時,由于重量分布發生變化,機器人會自由滑動。
比如, “磁場施加在傳送器被驅動的方向上(圖中正x方向),在四個角度(Ψ, Ψ/2, ?Ψ/2和?Ψ;Ψ=1.1弧度是從水平面的角度)上振蕩,頻率為5Hz。施加這種交替磁場時,由于推力、前后形狀造成的不對稱摩擦力和自身不對稱質量平衡等因素的組合作用,輸送者可以“向前行走”。”
研究人員估計,機器人80%的動作利用這種粘滑推進力,其余20%利用來自胃液中的水推進力。“因此,機身設計我們積極采用鰭片的概念和特征,您可以從相對扁平的設計中看出來,”研究團隊成員Shuhei Miyashita說道。
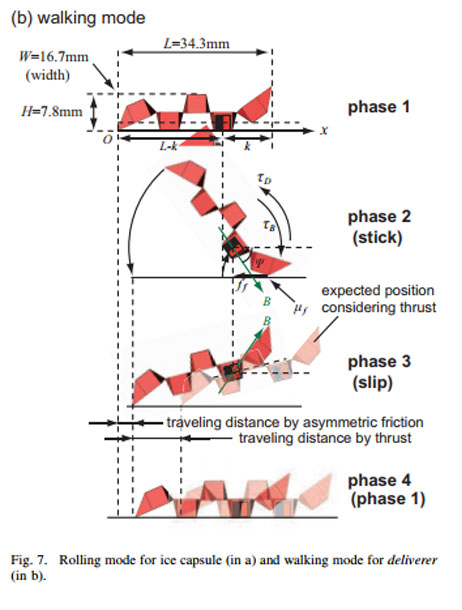
胃內的“粘滑”運動
可食用折疊機器人的材料與機械學
該設備的功能與其形式和材料有著直接關系。
這些材料不僅需要具有生物相容性,還需要具有足夠的結構完整性和剛度。材料必須能夠容納折疊褶皺,同時還要足夠剛性以產生粘滑運動所需的摩擦力。
最終,他們發現一種用做香腸腸衣的干豬腸材料非常成功。研究員李曙光說:“我們花了很多時間在亞洲市場和唐人街市場尋找材料。”整體結構由三層組成:頂部和底部各一層外殼,中間包裹著一層生物鰭片(Biolefin)——一種可生物降解的收縮包裝,在加熱時會收縮。
然后通過一系列僅穿透外層的淺縫產生折疊模式。比如,當僅在頂層制作一個切口時,中間層會收縮,并且將向下朝向底層折疊。
將機器人制作成可以吞下的小形狀很重要,然而折疊機器人展開的方式同樣重要。機器人設計需要利用作用在機器人上的胃力使得機器人自己展開。
為了實現正確的結構和形狀,研究團隊通過多次試驗,最終獲得了一種矩形形狀,且沿著短軸方向伸出折疊褶皺,同時角折進去,以便讓機器人增加牽引力。
可食用機器人的醫療應用
研究團隊表示,美國每年約有3500名人吞下電池,該設備可以用來取出卡在消化道中的電池。為了取出卡在人體器官中的電池,研究小組利用機器人的嵌入式磁鐵將電池與胃壁分開,并將其帶到體外。
該團隊表示,該技術的未來潛在應用包括:修復傷口;將藥物運送到目標位置;或從體內移除其他類型的異物等。
該機器人的最初原型于2016年開發,截至2017年仍然無法適用于人類。Rus 表示, “通常,完成體內實驗并獲得批準需要三年時間。從動物到人類可能還需要三年時間。成功治療人類可能至少需要六年時間。”
然而,這種可食用折疊機器人并不是折疊醫療機器人的唯一成果。哈佛醫療團隊正在研究類似方法,但是研發出的醫療折疊機器人卻完全不同。
以下視頻展示了MIT團隊的上一版折疊機器人如何為最新模型夯實基礎。
醫療機器人技術是個好主意嗎?
醫療保健微型機器人技術的概念并不新鮮。事實上,20世紀60年代的一部科幻電影神奇旅程就已經預示了納米機器人在身體血管內進行微型冒險以去除凝塊的潛力。然而,對于許多機器人醫療設備,比如植入式起搏器和除顫器,人們真正擔心的是黑客獲取醫療設備的訪問權限。
諸如胃折疊機器人的醫療保健機器人的風險因素要低得多,因為它們只是暫時停留在你的體內。與手術或其他侵入性醫療程序相比,這些胃機器人裝置的影響要小得多。
此外,這些設備并不具備互聯網功能,目前依賴于材料、摩擦、磁性和有效傳輸系統的相對低保真機制。這種簡單性使其成為強大的原型。
蘇黎世聯邦理工學院機器人學教授Bradley Nelson表示:“這個概念具有高度創造性和高度實用性,以巧妙的方式滿足了臨床需求。這是我見過的最有說服力的折疊機器人應用之一。”
訂閱 Device Plus,了解更多創新技術。

DevicePlus 編輯團隊
設備升級版適用于所有熱愛電子和機電一體化的人。
審核編輯黃宇
-
機器人
+關注
關注
211文章
28646瀏覽量
208428 -
AI
+關注
關注
87文章
31536瀏覽量
270344
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論