") MPU6050傳感器解析實驗
MPU6050傳感器解析實驗
19.1 MPU6050簡介
19.1.1 芯片概述
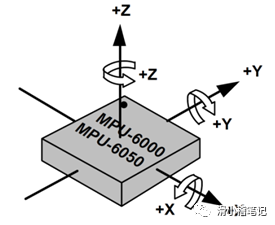
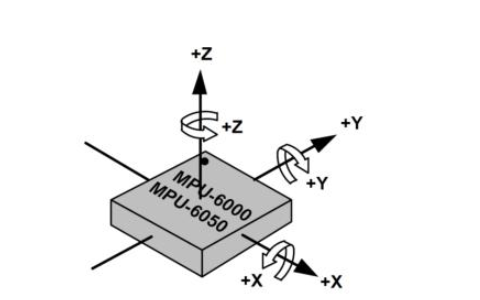
MPU6050是InvenSense公司推出的一款6軸運動處理芯片,內(nèi)置3軸陀螺儀及3軸速度傳感器,內(nèi)置兩組I2C接口,其中一組用于通信,另一組則用于連接外部磁力傳感器,采用自帶的數(shù)字運動處理器DMP(Digital Motion Processor),通過主I2C接口,直接讀取完整的9軸融合演算數(shù)據(jù)。MPU6050檢測軸及其檢測方向如下圖所示。
19.1.2 引腳介紹
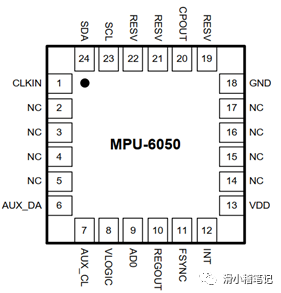
MPU6050采用QFN-24封裝,端口描述如下表所示。
| 引腳編號 | 引腳名稱 | 功能 |
|---|---|---|
| 1 | CLKIN | 外部參考時鐘輸入,如果不使用直接接地 |
| 2 | NC | 空引腳 |
| 3 | NC | 空引腳 |
| 4 | NC | 空引腳 |
| 5 | NC | 空引腳 |
| 6 | AUX_DA | 從I2C接口數(shù)據(jù)口,用于連接磁傳感器的SDA組成九軸傳感器 |
| 7 | AUX_CL | 從I2C接口時鐘口,用于連接磁傳感器的SCL組成九軸傳感器 |
| 8 | VLOGIC | IO口邏輯電平,最低可以設置1.8V,默認連接VDD |
| 9 | AD0 | I2C接口地址控制端,端口為高電平默認地址0x69,端口為低電平默認地址0x68 |
| 10 | REGOUT | 外接穩(wěn)壓器的濾波電容 |
| 11 | FSYNC | 幀同步數(shù)字輸入,如果不使用直接接GND |
| 12 | INT | 中斷信號輸出(可以配置為開漏輸出) |
| 13 | VDD | 電源正極,供電范圍0.5V~6VDC |
| 14 | NC | 空引腳 |
| 15 | NC | 空引腳 |
| 16 | NC | 空引腳 |
| 17 | NC | 空引腳 |
| 18 | GND | 電源地 |
| 19 | RESV | 保留 |
| 20 | CPOUT | 外部電荷泵電容 |
| 21 | RESV | 保留 |
| 22 | RESV | 保留 |
| 23 | SCL | 主I2C接口時鐘 |
| 24 | SDA | 主I2C接口數(shù)據(jù) |
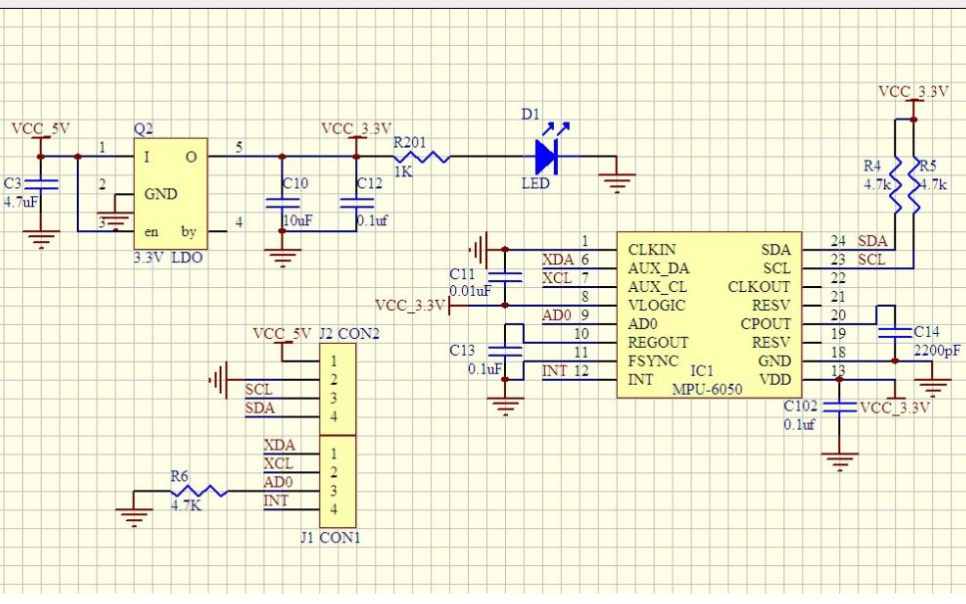
19.1.3 硬件電路
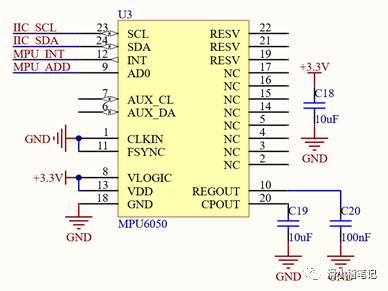
由于MPU6050內(nèi)部是可以自動計算X,Y和Z軸的方向及加速度的,使用者可以不考慮實際的數(shù)據(jù)轉(zhuǎn)換問題,但是為了詳細的了解MPU6050的計算過程,使用者最好還是應該具備了解原始數(shù)據(jù)如何轉(zhuǎn)換為我們需要的角度與加速度值。
19.2 姿態(tài)解算與融合算法基礎概念
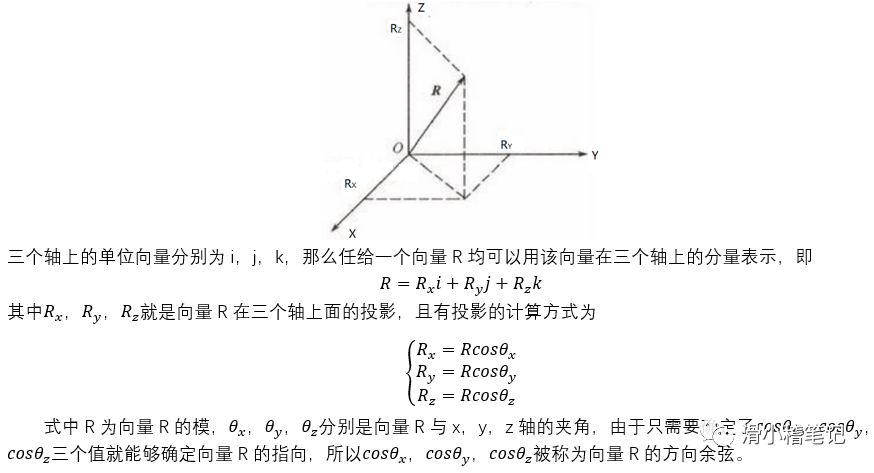
19.2.1 方向矩陣
設有一個三位直角坐標系Oxyz,如下圖所示。
19.2.2 方向余弦矩陣
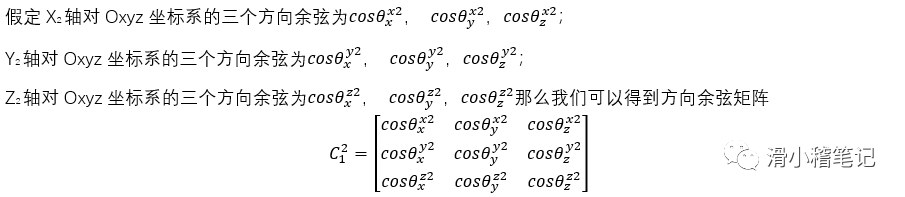
19.2.3 歐拉角
歐拉角是用于確定定點轉(zhuǎn)動缸體位置的3個1組的獨立角參量,由章動角θ,旋轉(zhuǎn)角(進動角)ψ和自轉(zhuǎn)角φ組成,歐拉角有多種取法,下面是比較常見的一種。
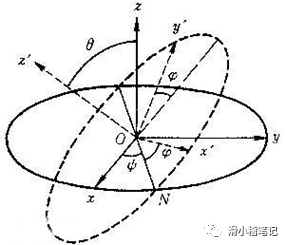
如上圖所示,由定點O做出固定坐標系Oxyz以及固定連在剛體的坐標系Ox’y’z’,以軸Oz和Oz’為基本軸。其垂直面Oxy和Ox’y’為基本平面,由軸Oz量到Oz’的角度θ稱為章動角,平面zOz’的垂線ON稱為節(jié)線,同時ON又是基本平面Ox’y’和Oxy的交線,在右手坐標系中,由ON的正端看,角θ應按照逆時針方向計算,由固定軸Ox到節(jié)線ON的角度ψ稱為進動角,也叫作旋轉(zhuǎn)角,由節(jié)線ON到動軸Ox’的角度φ稱為自轉(zhuǎn)角,有Oz和Oz’正端看,進動角ψ與自轉(zhuǎn)角φ也應該按照逆時針方向計算。
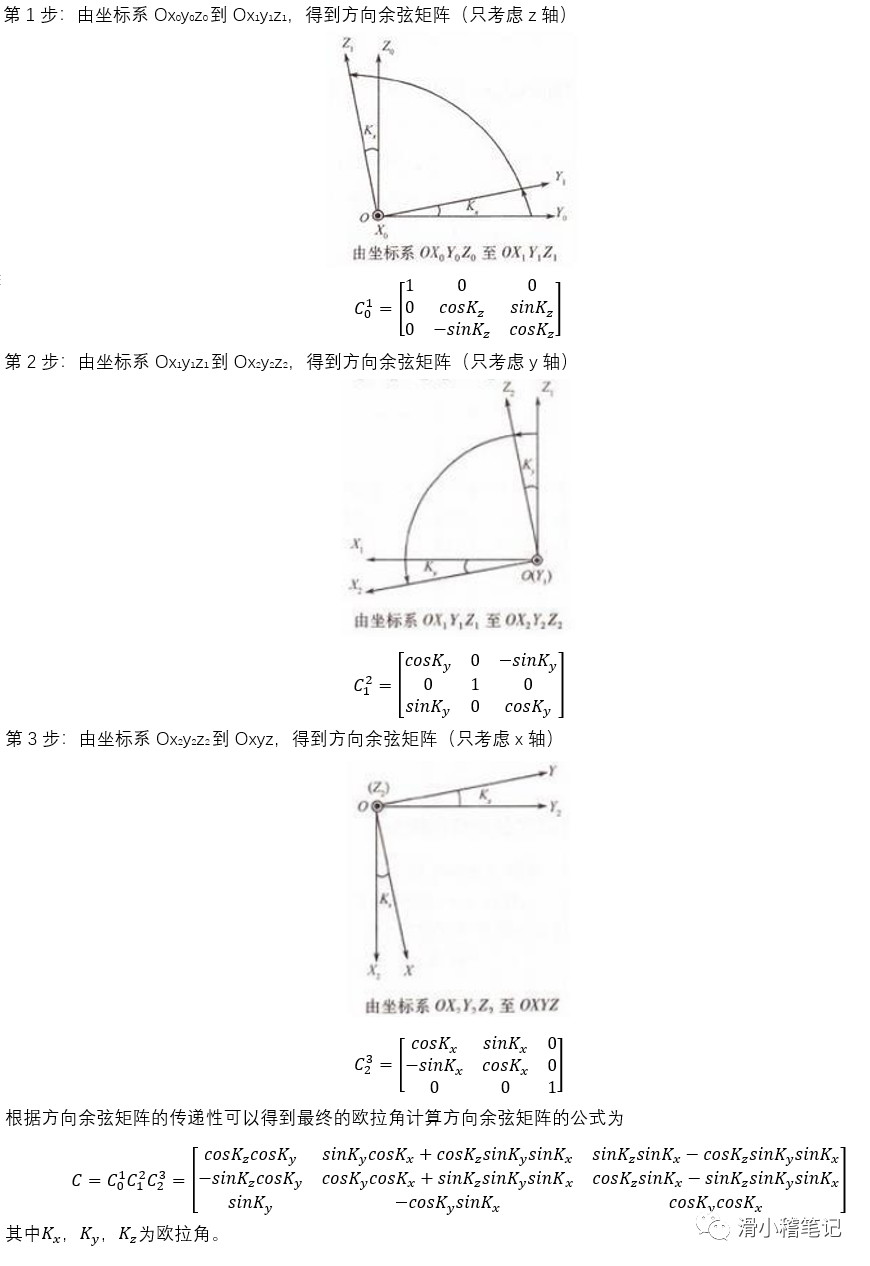
從上面的描述過程可以發(fā)現(xiàn),歐拉角實際是可以分解成三步來計算的:
第1步:繞z軸旋轉(zhuǎn)α,使得x軸與N軸重合
第2步:繞x軸旋轉(zhuǎn)β,使z軸與旋轉(zhuǎn)后的z軸重合
第3步:繞z軸旋轉(zhuǎn)y,是坐標系與旋轉(zhuǎn)后的完全重合
根據(jù)上面的三個步驟,我們來通過以下實例來說明歐拉角與方向余弦矩陣的轉(zhuǎn)換過程。
19.2.4 四元數(shù)與歐拉角的轉(zhuǎn)換
四元數(shù)是一個簡單的超復數(shù),是由實數(shù)加上三個虛數(shù)單位i,j,k組成,每個四元數(shù)都是1,i,j,k的線性組合,四元數(shù)是愛爾蘭數(shù)學家哈密頓在1843年發(fā)明的數(shù)學概念,四元數(shù)的乘法不符合交換律。
四元數(shù)姿態(tài)表達式是一個四參數(shù)的表達式,它的基本思路是一個坐標系轉(zhuǎn)換到另一個坐標系可以通過繞一個定義在參考系中的矢量μ的單次轉(zhuǎn)動來實現(xiàn),四元數(shù)用符號q表示,是一個具有4個元素的矢量,這些元素是該矢量方向和轉(zhuǎn)動大小的函數(shù)。定義四元數(shù)如下所示。

這里直接給出結(jié)論,不作證明。會用即可。四元數(shù)與歐拉角的轉(zhuǎn)換公式為:

用方向余弦表示歐拉角,這里歐拉角不允許等于90度。

用四元數(shù)表示歐拉角

在姿態(tài)解算中常用的算法由歐拉角法,方向余弦法和四元數(shù)法,歐拉角在求解姿態(tài)時存在奇點,無法用于全姿態(tài)結(jié)算,方向余弦沒有奇點,但是計算量大,無法滿足實時性要求,四元數(shù)法,計算量小,無奇點可以滿足飛行器運動過程中姿態(tài)的實時解算,姿態(tài)解算的原理是對于一個確定的向量,用不同的坐標系表示時,他們所表示的大小和方向一定是相同的。但是由于這兩個坐標系的旋轉(zhuǎn)矩陣存在誤差,那么當一個向量經(jīng)過一個有誤差存在的旋轉(zhuǎn)矩陣后,在另一個坐標系中肯定和理論值是有偏差的,我們通過這個偏差來修正這個旋轉(zhuǎn)矩陣。這個旋轉(zhuǎn)矩陣的元素是四元數(shù),我們修正的就是四元數(shù),以此來修正姿態(tài)。
19.3 實驗例程
實驗內(nèi)容:利用MPU6050采集到數(shù)據(jù)獲取歐拉角顯示在TFTLCD上。
19.3.1 MPU6050內(nèi)部相關寄存器
(1) 電源管理寄存器1 (地址0x6B)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| DEVICE_RST | SLEEP | CYCLE | - | TEMP_DIS | CLKSEL[2:0] |
Bit 7:軟件復位
0:不復位MPU6050
1:復位MPU6050
Bit 6:休眠模式
0:正常工作模式
1:睡眠模式
Bit 5:循環(huán)模式
0:默認狀態(tài)
1:睡眠模式與喚醒模式交替運行
Bit 3:溫度傳感器使能
0:使能溫度傳感器
1:禁用溫度傳感器
Bit 2~Bit 0:選擇系統(tǒng)時鐘源
000:內(nèi)部8M RC時鐘源
001:PLL,使用X軸陀螺作為參考
010:PLL,使用Y軸陀螺作為參考
011:PLL,使用Z軸陀螺作為參考
100:PLL,使用外部32.768kHz作為參考
101:PLL,使用外部19.2MHz作為參考
110:保留
111:關閉時鐘,保持時序產(chǎn)生電路復位狀態(tài)
(2) 陀螺儀配置寄存器 (地址:0x1B)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| XG_ST | YG_ST | ZG_ST | FS_SEL[1:0] | - | - | - |
Bit 7:陀螺儀X軸自檢
0:禁用
1:啟用
Bit 6:陀螺儀Y軸自檢
0:禁用
1:啟用
Bit 5:陀螺儀Z軸自檢
0:禁用
1:啟用
Bit 4~Bit 3:陀螺儀滿量程
0:±250°/s
1:±500°/s
2:±1000°/s
3:±2000°/s
(3) 加速度傳感器配置寄存器 (地址:0x1C)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| XA_ST | YA_ST | ZA_ST | AFS_SEL[1:0] | - | - | - |
Bit 7:加速度計X軸自檢
0:禁用
1:啟用
Bit 6:加速度計Y軸自檢
0:禁用
1:啟用
Bit 5:加速度計Z軸自檢
0:禁用
1:啟用
Bit 4~Bit 3:加速度傳感器滿量程
0:±2g
1:±4g
2:±8g
3:±16g
(4) FIFO使能寄存器 (地址:0x23)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| TEMP | XG | YG | ZG | ACCEL | SLV2 | SLV1 | SLV0 |
Bit 7:TEMP_OUT_H和TEMP_OUT_L緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
Bit 6:GYRO_XOUT_H和GYRO_XOUT_L緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
Bit 5:GYRO_YOUT_H和GYRO_YOUT_L緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
Bit 4:GYRO_ZOUT_H和GYRO_ZOUT_L緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
Bit 3:ACCEL_XOUT_H/ L,ACCEL_YOUT_H/L,ACCEL_ZOUT_H/ L緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
Bit 2:EXT_SENS_DATA寄存器和從機2緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
Bit 1:EXT_SENS_DATA寄存器和從機1緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
Bit 0:EXT_SENS_DATA寄存器和從機0緩沖區(qū)激活
0:關閉該緩沖區(qū)
1:激活該FIFO緩沖區(qū)
(5) 陀螺儀采樣率分頻寄存器 (地址:0x19)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| SMPLRT_DIV[7:0] |
采樣頻率=陀螺儀輸出頻率/(1+SMPLRT_DIV)
(6) 配置寄存器 (地址:0x1A)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| - | - | EXT_SYNC_SET[2:0] | DLPF_CFG[2:0] |
Bit 5~Bit 3:該段內(nèi)的值確定采樣的值將代替?zhèn)鞲衅鲾?shù)據(jù)寄存器中的最低有效位
0:輸入禁用
1:TEMP_OUT_L寄存器第0位
2:GYRO_XOUT_L寄存器第0位
3:GYRO_YOUT_L寄存器第0位
4:GYRO_ZOUT_L寄存器第0位
5:ACCEL_XOUT_L寄存器第0位
6:ACCEL _YOUT_L寄存器第0位
7:ACCEL _ZOUT_L寄存器第0位
Bit 2~Bit 0:低通濾波器設置
| 值 | 加速度傳感器(Fs=1kHz) | 角速度傳感器 |
|---|---|---|
| 帶寬(Hz) | 延遲(ms) | 帶寬(Hz) |
| 000 | 260 | 0 |
| 001 | 184 | 2.0 |
| 010 | 94 | 3.0 |
| 011 | 44 | 4.9 |
| 100 | 21 | 8.5 |
| 101 | 10 | 13.8 |
| 110 | 5 | 19.0 |
| 111 | 保留 | 保留 |
(7) 電源管理寄存器2 (地址:0x6C)
| 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|
| LP_WAKE_CTRL[1:0] | STBY_XA | STBY_YA | STBY_ZA | STBY_XG | STBY_YG | XTBY_ZG |
Bit 7~Bit 6:低功耗模式下的喚醒頻率
0:1.25Hz
1:5Hz
2:20Hz
3:40Hz
Bit 5:X軸加速度待機模式
0:禁用
1:啟用
Bit 4:Y軸加速度待機模式
0:禁用
1:啟用
Bit 3:Z軸加速度待機模式
0:禁用
1:啟用
Bit 2:X軸陀螺儀待機模式
0:禁用
1:啟用
Bit 1:Y軸陀螺儀待機模式
0:禁用
1:啟用
Bit 0:Z軸陀螺儀待機模式
0:禁用
1:啟用
19.3.2 源代碼
(1)創(chuàng)建mpu6050.h文件,輸入以下代碼。
/*********************************************************************************************************
MUP6050 驅(qū) 動 文 件
*********************************************************************************************************/
#ifndef _MPU6050_H_
#define _MPU6050_H_
#include "sys.h"
/*********************************************************************************************************
硬 件 端 口 定 義
*********************************************************************************************************/
#define MPU_IIC_SCL PBout( 10) //SCL
#define MPU_IIC_SDA PBout( 11 ) //SDA
#define MPU_READ_SDA PBin( 11 ) //輸入SDA
#define MPU_AD0_CTRL PAout( 15 ) //控制AD0電平,從而控制MPU地址
/*********************************************************************************************************
數(shù) 據(jù) 結(jié) 構(gòu) 定 義
*********************************************************************************************************/
//如果AD0腳(9腳)接地,IIC地址為0X68(不包含最低位)
//如果接V3.3,則IIC地址為0X69(不包含最低位)
#define MPU_ADDR 0X68
#define MPU_ACCEL_OFFS_REG 0X06 //accel_offs寄存器,可讀取版本號,寄存器手冊未提到
#define MPU_PROD_ID_REG 0X0C //prod id寄存器,在寄存器手冊未提到
#define MPU_SELF_TESTX_REG 0X0D //自檢寄存器X
#define MPU_SELF_TESTY_REG 0X0E //自檢寄存器Y
#define MPU_SELF_TESTZ_REG 0X0F //自檢寄存器Z
#define MPU_SELF_TESTA_REG 0X10 //自檢寄存器A
#define MPU_SAMPLE_RATE_REG 0X19 //采樣頻率分頻器
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺儀配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度計配置寄存器
#define MPU_MOTION_DET_REG 0X1F //運動檢測閥值設置寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_I2CMST_CTRL_REG 0X24 //IIC主機控制寄存器
#define MPU_I2CSLV0_ADDR_REG 0X25 //IIC從機0器件地址寄存器
#define MPU_I2CSLV0_REG 0X26 //IIC從機0數(shù)據(jù)地址寄存器
#define MPU_I2CSLV0_CTRL_REG 0X27 //IIC從機0控制寄存器
#define MPU_I2CSLV1_ADDR_REG 0X28 //IIC從機1器件地址寄存器
#define MPU_I2CSLV1_REG 0X29 //IIC從機1數(shù)據(jù)地址寄存器
#define MPU_I2CSLV1_CTRL_REG 0X2A //IIC從機1控制寄存器
#define MPU_I2CSLV2_ADDR_REG 0X2B //IIC從機2器件地址寄存器
#define MPU_I2CSLV2_REG 0X2C //IIC從機2數(shù)據(jù)地址寄存器
#define MPU_I2CSLV2_CTRL_REG 0X2D //IIC從機2控制寄存器
#define MPU_I2CSLV3_ADDR_REG 0X2E //IIC從機3器件地址寄存器
#define MPU_I2CSLV3_REG 0X2F //IIC從機3數(shù)據(jù)地址寄存器
#define MPU_I2CSLV3_CTRL_REG 0X30 //IIC從機3控制寄存器
#define MPU_I2CSLV4_ADDR_REG 0X31 //IIC從機4器件地址寄存器
#define MPU_I2CSLV4_REG 0X32 //IIC從機4數(shù)據(jù)地址寄存器
#define MPU_I2CSLV4_DO_REG 0X33 //IIC從機4寫數(shù)據(jù)寄存器
#define MPU_I2CSLV4_CTRL_REG 0X34 //IIC從機4控制寄存器
#define MPU_I2CSLV4_DI_REG 0X35 //IIC從機4讀數(shù)據(jù)寄存器
#define MPU_I2CMST_STA_REG 0X36 //IIC主機狀態(tài)寄存器
#define MPU_INTBP_CFG_REG 0X37 //中斷/旁路設置寄存器
#define MPU_INT_EN_REG 0X38 //中斷使能寄存器
#define MPU_INT_STA_REG 0X3A //中斷狀態(tài)寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X軸高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X軸低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y軸高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y軸低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z軸高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z軸低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //溫度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //溫度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺儀值,X軸高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺儀值,X軸低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺儀值,Y軸高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺儀值,Y軸低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺儀值,Z軸高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺儀值,Z軸低8位寄存器
#define MPU_I2CSLV0_DO_REG 0X63 //IIC從機0數(shù)據(jù)寄存器
#define MPU_I2CSLV1_DO_REG 0X64 //IIC從機1數(shù)據(jù)寄存器
#define MPU_I2CSLV2_DO_REG 0X65 //IIC從機2數(shù)據(jù)寄存器
#define MPU_I2CSLV3_DO_REG 0X66 //IIC從機3數(shù)據(jù)寄存器
#define MPU_I2CMST_DELAY_REG 0X67 //IIC主機延時管理寄存器
#define MPU_SIGPATH_RST_REG 0X68 //信號通道復位寄存器
#define MPU_MDETECT_CTRL_REG 0X69 //運動檢測控制寄存器
#define MPU_USER_CTRL_REG 0X6A //用戶控制寄存器
#define MPU_PWR_MGMT1_REG 0X6B //電源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //電源管理寄存器2
#define MPU_FIFO_CNTH_REG 0X72 //FIFO計數(shù)寄存器高八位
#define MPU_FIFO_CNTL_REG 0X73 //FIFO計數(shù)寄存器低八位
#define MPU_FIFO_RW_REG 0X74 //FIFO讀寫寄存器
#define MPU_DEVICE_ID_REG 0X75 //器件ID寄存器
/*********************************************************************************************************
函 數(shù) 列 表
*********************************************************************************************************/
void MPU_IIC_Init( void ) ; //初始化IIC
u8 MPU_Init( void ) ; //初始化MPU6050
u8 MPU_Read_Len( u8 addr, u8 reg, u8 len, u8 *buf ) ; //IIC連續(xù)讀
u8 MPU_Write_Len( u8 addr, u8 reg, u8 len, u8 *buf ) ; //IIC連續(xù)寫
short MPU_Get_Temperature( void ) ; //獲取溫度
u8 MPU_Get_Gyroscope( short *gx, short *gy, short *gz ) ; //獲取陀螺儀值
u8 MPU_Get_Accelerometer( short *ax, short *ay, short *az ) ; //獲取加速度值
#endif
(2)創(chuàng)建mpu6050.c文件,輸入以下代碼。
/*********************************************************************************************************
MUP6050 驅(qū) 動 程 序
*********************************************************************************************************/
#include "mpu6050.h"
#include "delay.h"
/***************************************************
Name :MPU_IIC_Init
Function :初始化IIC
Paramater :None
Return :None
***************************************************/
void MPU_IIC_Init()
{
RCC->APB2ENR |= 1<<3 ; //先使能PB時鐘
GPIOB->CRH &= 0xFFFF00FF ; //PB10/11 推挽輸出
GPIOB->CRH |= 0x00003300 ;
GPIOB->ODR |= 3<<10 ; //PB10,11 輸出高
}
/***************************************************
Name :MPU_IIC_Wait_Ack
Function :開始時序
Paramater :None
Return :None
***************************************************/
void MPU_IIC_Start()
{
GPIOB->CRH &= 0xFFFF0FFF ;
GPIOB->CRH |= 0x00003000 ;
MPU_IIC_SDA = 1 ;
MPU_IIC_SCL = 1 ;
delay_us( 2 ) ;
MPU_IIC_SDA = 0 ;
delay_us( 2 ) ;
MPU_IIC_SCL = 0 ;
}
/***************************************************
Name :MPU_IIC_Wait_Ack
Function :停止時序
Paramater :None
Return :None
***************************************************/
void MPU_IIC_Stop()
{
GPIOB->CRH &= 0xFFFF0FFF ;
GPIOB->CRH |= 0x00003000 ;
MPU_IIC_SCL = 0 ;
MPU_IIC_SDA = 0 ;
delay_us( 2 ) ;
MPU_IIC_SCL = 1 ;
MPU_IIC_SDA = 1 ;
delay_us( 2 ) ;
}
/***************************************************
Name :MPU_IIC_Wait_Ack
Function :應答時序
Paramater :None
Return :
0:成功
1:失敗
***************************************************/
u8 MPU_IIC_Wait_Ack()
{
u8 ucErrTime=0 ;
GPIOB->CRH &= 0xFFFF0FFF ;
GPIOB->CRH |= 0x00008000 ;
MPU_IIC_SDA = 1 ;
delay_us( 2 ) ;
MPU_IIC_SCL = 1 ;
delay_us( 2 ) ;
while( MPU_READ_SDA )
{
ucErrTime ++ ;
if( ucErrTime>250 )
{
MPU_IIC_Stop() ;
return 1 ;
}
}
MPU_IIC_SCL = 0 ; //時鐘輸出0
return 0 ;
}
/***************************************************
Name :MPU_IIC_Send_Byte
Function :IIC發(fā)送1個字節(jié)
Paramater :
Ack:應答控制
0:不應答
1:應答
Return :None
***************************************************/
void MPU_IIC_Send_Byte( u8 Byte )
{
u8 i ;
GPIOB->CRH &= 0xFFFF0FFF ;
GPIOB->CRH |= 0x00003000 ;
MPU_IIC_SCL = 0 ; //拉低時鐘開始數(shù)據(jù)傳輸
for( i=0; i<8; i++ )
{
if( ( Byte&0x80 )==0x80 )
MPU_IIC_SDA = 1 ;
else
MPU_IIC_SDA = 0 ;
Byte <<= 1 ;
MPU_IIC_SCL = 1 ;
delay_us( 2 ) ;
MPU_IIC_SCL = 0 ;
delay_us( 2 ) ;
}
}
/***************************************************
Name :MPU_IIC_Read_Byte
Function :IIC讀取1個字節(jié)
Paramater :
Ack:應答控制
0:不應答
1:應答
Return :讀取的字節(jié)
***************************************************/
u8 MPU_IIC_Read_Byte( u8 Ack )
{
u8 i, Byte=0;
GPIOB->CRH &= 0xFFFF0FFF ;
GPIOB->CRH |= 0x00008000 ;
for( i=0; i<8; i++ )
{
MPU_IIC_SCL = 0 ;
delay_us( 2 ) ;
MPU_IIC_SCL = 1 ;
Byte <<= 1 ;
if( MPU_READ_SDA )
Byte ++ ;
delay_us( 2 ) ;
}
MPU_IIC_SCL = 0 ;
GPIOB->CRH &= 0xFFFF0FFF ;
GPIOB->CRH |= 0x00003000 ;
MPU_IIC_SDA = 1-Ack ;
delay_us( 2 ) ;
MPU_IIC_SCL = 1 ;
delay_us( 2 ) ;
MPU_IIC_SCL = 0 ;
return Byte ;
}
/***************************************************
Name :MPU_Write_Byte
Function :IIC寫一個字節(jié)
Paramater :
reg:寄存器地址
data:數(shù)據(jù)
Return :
0:正常
其他:錯誤代碼
***************************************************/
u8 MPU_Write_Byte( u8 reg, u8 data )
{
MPU_IIC_Start() ;
MPU_IIC_Send_Byte( MPU_ADDR<<1 ) ; //發(fā)送器件地址+寫命令
//等待應答
if( MPU_IIC_Wait_Ack() )
{
MPU_IIC_Stop() ;
return 1 ;
}
MPU_IIC_Send_Byte( reg ) ; //寫寄存器地址
MPU_IIC_Wait_Ack() ; //等待應答
MPU_IIC_Send_Byte( data ) ; //發(fā)送數(shù)據(jù)
//等待ACK
if( MPU_IIC_Wait_Ack() )
{
MPU_IIC_Stop() ;
return 1 ;
}
MPU_IIC_Stop() ;
return 0 ;
}
/***************************************************
Name :MPU_Read_Byte
Function :IIC讀一個字節(jié)
Paramater :
reg:寄存器地址
Return :讀到的數(shù)據(jù)
***************************************************/
u8 MPU_Read_Byte( u8 reg )
{
u8 res ;
MPU_IIC_Start() ;
MPU_IIC_Send_Byte( MPU_ADDR<<1 ) ; //發(fā)送器件地址+寫命令
MPU_IIC_Wait_Ack() ; //等待應答
MPU_IIC_Send_Byte( reg ) ; //寫寄存器地址
MPU_IIC_Wait_Ack() ; //等待應答
MPU_IIC_Start() ;
MPU_IIC_Send_Byte( ( MPU_ADDR<<1 )|1 ) ; //發(fā)送器件地址+讀命令
MPU_IIC_Wait_Ack() ; //等待應答
res = MPU_IIC_Read_Byte( 0 ) ; //讀取數(shù)據(jù),發(fā)送nACK
MPU_IIC_Stop() ; //產(chǎn)生一個停止條件
return res ;
}
/***************************************************
Name :MPU_Read_Byte
Function :設置MPU6050的采樣率(假定Fs=1KHz)
Paramater :
rate:4~1000(Hz)
Return :
0:成功
其他:失敗
***************************************************/
u8 MPU_Set_Rate( u16 rate )
{
u8 data ;
if( rate>1000 )
rate=1000 ;
if( rate<4 )
rate = 4 ;
data = 1000/rate-1 ;
data = MPU_Write_Byte( MPU_SAMPLE_RATE_REG, data ) ; //設置數(shù)字低通濾波器
//自動設置LPF為采樣率的一半
if( ( rate/2 )>=188 )
data = 1 ;
else if( ( rate/2 )>=98 )
data = 2 ;
else if( ( rate/2 )>=42 )
data = 3 ;
else if( ( rate/2 )>=20 )
data = 4;
else if( ( rate/2 )>=10 )
data = 5 ;
else
data = 6 ;
return MPU_Write_Byte( MPU_CFG_REG, data ) ; //設置數(shù)字低通濾波器
}
/***************************************************
Name :MPU_Init
Function :初始化MPU6050
Paramater :None
Return :
0:成功
其他:錯誤代碼
***************************************************/
u8 MPU_Init()
{
u8 res ;
RCC->APB2ENR |= 1<<2 ; //使能PORTA時鐘
GPIOA->CRH &= 0x0FFFFFFF ; //PA15設置成推挽輸出
GPIOA->CRH |= 0x30000000 ;
JTAG_Set( 1 ) ; //禁止JTAG,從而PA15可以做普通IO使用,否則PA15不能做普通IO
MPU_AD0_CTRL = 0 ; //控制MPU6050的AD0腳為低電平,從機地址為:0X68
//初始化IIC總線
RCC->APB2ENR |= 1<<3 ; //先使能PB時鐘
GPIOB->CRH &= 0xFFFF00FF ; //PB10/11 推挽輸出
GPIOB->CRH |= 0x00003300 ;
GPIOB->ODR |= 3<<10 ; //PB10,11 輸出高
MPU_Write_Byte( MPU_PWR_MGMT1_REG, 0x80 ) ; //復位MPU6050
delay_ms( 100 ) ;
MPU_Write_Byte( MPU_PWR_MGMT1_REG, 0x00 ) ; //喚醒MPU6050
MPU_Write_Byte( MPU_GYRO_CFG_REG, 3<<3 ) ; //陀螺儀傳感器,±2000dps
MPU_Write_Byte( MPU_ACCEL_CFG_REG, 0<<3 ) ; //加速度傳感器,±2g
MPU_Set_Rate( 50 ) ; //設置采樣率50Hz
MPU_Write_Byte( MPU_INT_EN_REG, 0x00 ) ; //關閉所有中斷
MPU_Write_Byte( MPU_USER_CTRL_REG, 0x00 ) ; //I2C主模式關閉
MPU_Write_Byte( MPU_FIFO_EN_REG, 0x00 ) ; //關閉FIFO
MPU_Write_Byte( MPU_INTBP_CFG_REG, 0x80 ) ; //INT引腳低電平有效
res = MPU_Read_Byte( MPU_DEVICE_ID_REG ) ;
//器件ID正確
if( res==MPU_ADDR )
{
MPU_Write_Byte( MPU_PWR_MGMT1_REG, 0x01 ) ; //設置CLKSEL,PLL X軸為參考
MPU_Write_Byte( MPU_PWR_MGMT2_REG, 0x00 ) ; //加速度與陀螺儀都工作
MPU_Set_Rate( 50 ) ; //設置采樣率為50Hz
}
else
return 1 ;
return 0 ;
}
/***************************************************
Name :MPU_Write_Len
Function :IIC連續(xù)寫
Paramater :
addr:器件地址
reg:寄存器地址
len:寫入長度
buf:數(shù)據(jù)區(qū)
Return :
0:成功
其他:錯誤代碼
***************************************************/
u8 MPU_Write_Len( u8 addr, u8 reg, u8 len, u8 *buf )
{
u8 i ;
MPU_IIC_Start() ;
MPU_IIC_Send_Byte( addr<<1 ) ; //發(fā)送器件地址+寫命令
if( MPU_IIC_Wait_Ack() ) //等待應答
{
MPU_IIC_Stop() ;
return 1 ;
}
MPU_IIC_Send_Byte( reg ) ; //寫寄存器地址
MPU_IIC_Wait_Ack() ; //等待應答
for( i=0; i
(3)創(chuàng)建1.c文件,輸入以下代碼。
#include "sys.h"
#include "delay.h"
#include "usart1.h"
#include "lcd.h"
#include "mpu6050.h"
#include "inv_mpu.h"
#include "inv_mpu_dmp_motion_driver.h"
int main()
{
u8 t, Str[ 20 ] ;
float pitch, roll, yaw ; //歐拉角
short aacx, aacy, aacz ; //加速度傳感器原始數(shù)據(jù)
short gyrox, gyroy, gyroz ; //陀螺儀原始數(shù)據(jù)
float temp ; //溫度
STM32_Clock_Init( 9 ) ; //系統(tǒng)時鐘設置
SysTick_Init( 72 ) ; //延時初始化
USART1_Init( 72, 500000 ) ; //串口初始化為500000
LCD_Init() ; //初始化LCD
MPU_Init() ; //初始化MPU6050
while( mpu_dmp_init() ) ;
POINT_COLOR = RED ; //設置字體為藍色
while(1)
{
if( mpu_dmp_get_data( &pitch, &roll, &yaw )==0 )
{
temp = ( float )MPU_Get_Temperature()/100 ; //得到溫度值
MPU_Get_Accelerometer( &aacx, &aacy, &aacz ) ; //得到加速度傳感器數(shù)據(jù)
MPU_Get_Gyroscope( &gyrox, &gyroy, &gyroz ) ; //得到陀螺儀數(shù)據(jù)
//轉(zhuǎn)換溫度
sprintf( ( char* )Str, "Temp: %.2f C", temp ) ;
for( t=0; t<20; t++ )
{
if( Str[ t ]=='.' )
{
t += 4 ;
while( t<20 )
{
t ++ ;
Str[ t ] = ' ' ;
}
}
}
LCD_ShowString( 10, 0, Str ) ;
//自轉(zhuǎn)角
sprintf( ( char* )Str, "Pitch: %.1f C", pitch ) ;
for( t=0; t<20; t++ )
{
if( Str[ t ]=='.' )
{
t += 3 ;
while( t<20 )
{
t ++ ;
Str[ t ] = ' ' ;
}
}
}
LCD_ShowString( 10, 30, Str ) ;
//章動角
sprintf( ( char* )Str, "Roll: %.1f C", roll ) ;
for( t=0; t<20; t++ )
{
if( Str[ t ]=='.' )
{
t += 3 ;
while( t<20 )
{
t ++ ;
Str[ t ] = ' ' ;
}
}
}
LCD_ShowString( 10, 60, Str ) ;
//旋轉(zhuǎn)角
sprintf( ( char* )Str, "Yaw: %.1f C", yaw ) ;
for( t=0; t<20; t++ )
{
if( Str[ t ]=='.' )
{
t += 3 ;
while( t<20 )
{
t ++ ;
Str[ t ] = ' ' ;
}
}
}
LCD_ShowString( 10, 90, Str ) ;
}
}
}
注:例程使用了網(wǎng)上已經(jīng)移植成功的DMP源碼,直接調(diào)用即可。
-
DMP
+關注
關注
1文章
45瀏覽量
16769 -
I2C接口
+關注
關注
1文章
125瀏覽量
25361 -
MPU6050
+關注
關注
39文章
307瀏覽量
71661
發(fā)布評論請先 登錄
相關推薦
基于stm32的mpu6050傳感器實驗 精選資料推薦
MPU6050的使用步驟
mpu6050六軸傳感器模塊驅(qū)動程序源代碼分享

mpu6050和mpu3050有什么不同和相同(基礎介紹和區(qū)別分析)
MPU6050六軸傳感器實驗的程序和工程文件免費下載
MPU6050六軸陀螺儀傳感器實驗的資料合集免費下載

基于stm32的mpu6050傳感器實驗

MPU6050簡介
STM32入門學習筆記之MPU6050傳感器解析實驗1






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論