") opencv實(shí)戰(zhàn)——機(jī)器視覺檢測和計(jì)數(shù)
opencv實(shí)戰(zhàn)——機(jī)器視覺檢測和計(jì)數(shù)
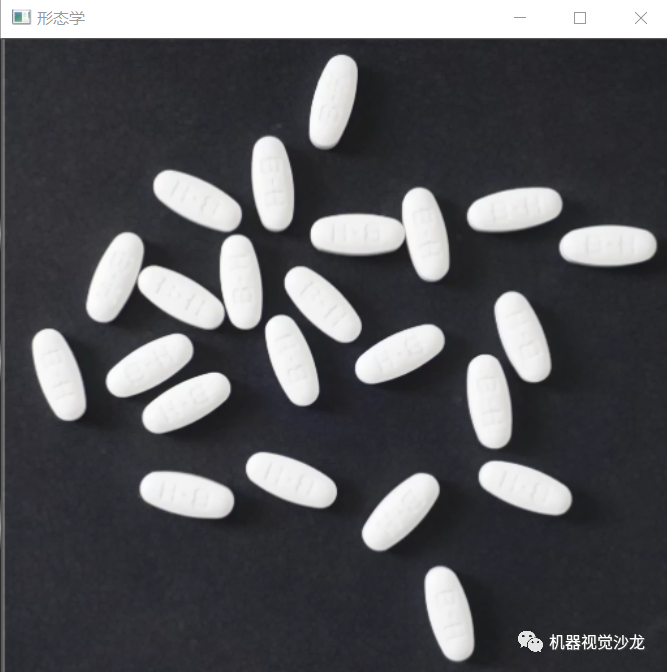
在機(jī)器視覺中,有時(shí)需要對產(chǎn)品進(jìn)行檢測和計(jì)數(shù)。其難點(diǎn)無非是對于產(chǎn)品的圖像分割。
由于之前網(wǎng)購的維生素片,有時(shí)候忘了今天有沒有吃過,就想對瓶子里的藥片計(jì)數(shù)...在學(xué)習(xí)opencv以后,希望實(shí)現(xiàn)對于維生素片分割計(jì)數(shù)算法。本次實(shí)戰(zhàn)在基于形態(tài)學(xué)的基礎(chǔ)上又衍生出基于距離變換的分水嶺算法,使其實(shí)現(xiàn)的效果更具普遍性。
基于形態(tài)學(xué)的維生素片檢測和計(jì)數(shù)
整體思路:
-
讀取圖片
-
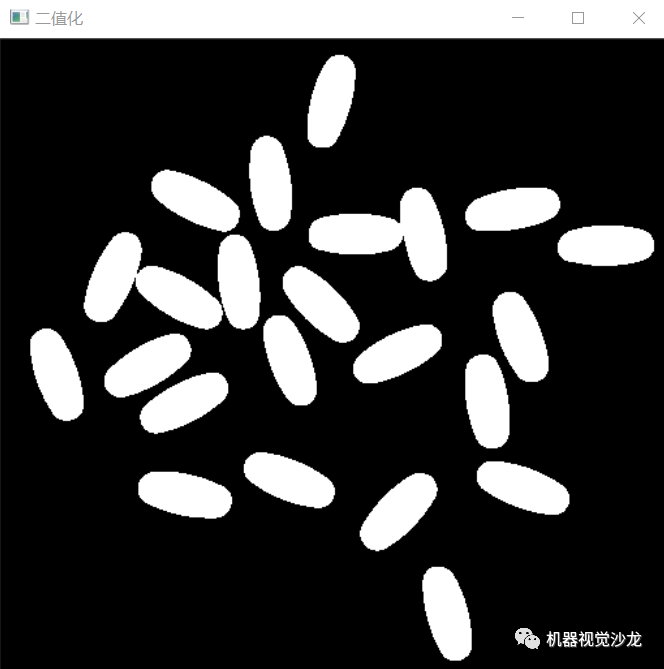
形態(tài)學(xué)處理(在二值化前進(jìn)行適度形態(tài)學(xué)處理,效果俱佳)
-
二值化
-
提取輪廓(進(jìn)行藥片分割)
-
獲取輪廓索引,并篩選所需要的輪廓
-
畫出輪廓,顯示計(jì)數(shù)
opencv實(shí)現(xiàn):
int main(int argc, char** argv)
{
Mat src, src_binary,dst,src_distance;
src = imread("D:/opencv練習(xí)圖片/維生素片機(jī)器視覺檢測和計(jì)數(shù).png");
imshow("原圖片", src);
Mat kernel = getStructuringElement(MORPH_RECT, Size(16, 16), Point(-1, -1));
morphologyEx(src, dst, MORPH_OPEN, kernel);
imshow("形態(tài)學(xué)",dst);
cvtColor(dst, dst, COLOR_RGB2GRAY);
threshold(dst, src_binary, 100, 255, THRESH_OTSU);
imshow("二值化", src_binary);
vector<vector> contours;
findContours(src_binary, contours, RETR_EXTERNAL, CHAIN_APPROX_NONE, Point(0, 0));
RNG rng(12345);
double area;
Point2i PL;
for (size_t i = 0; i < contours.size(); i++)
{
area = contourArea(contours[i]);
if (area < 500)continue;
PL = contours[i].front();
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
drawContours(src, contours, i, color, 2, 8);
putText(src, to_string(i), PL, FONT_HERSHEY_COMPLEX, 1, color, 2);
}
imshow("計(jì)數(shù)結(jié)果", src);
waitKey(0);
return 0;
}
效果展示:
由上圖可以看的,原圖在經(jīng)過形態(tài)學(xué)處理后,可以去除很多細(xì)節(jié),簡化后續(xù)的藥片分割操作。
但是在計(jì)數(shù)結(jié)果圖上發(fā)現(xiàn),索引17號藥片并沒有完全分割(實(shí)際上修改形態(tài)學(xué)的結(jié)構(gòu)元素尺寸(改為20*20)也可以完全分離這兩個(gè)藥片)。
這不由得讓我們思考,如果簡單的形態(tài)學(xué)處理分割不了藥片呢?
對于復(fù)雜的產(chǎn)品圖片,我們可以使用基于距離變換的分水嶺算法對其分割。
基于距離變換的分水嶺算法檢測和計(jì)數(shù)
OpenCV 采用了基于標(biāo)記點(diǎn)的分水嶺算法,在這種算法中我們要設(shè)置哪些山谷點(diǎn)會匯合,哪些不會。這是一種交互式的圖像分割。我們要做的就是給我們已知的對象打上不同的標(biāo)簽(即添加注水點(diǎn))。然后實(shí)施分水嶺算法。每一次灌水,我們的標(biāo)簽就會被更新,當(dāng)兩個(gè)不同顏色的標(biāo)簽相遇時(shí)就構(gòu)建堤壩,直到將所有山峰淹沒,最后我們得到的邊界對象(堤壩)的值為 -1。
對于如何打上標(biāo)簽(即添加注水點(diǎn))有兩種辦法:
opencv中,對于一張二值化的圖像,后續(xù)處理方式有兩種。第一種方式就是利用findContours、drawContours等函數(shù)進(jìn)行輪廓分析(opencv以對輪廓的處理為主)。第二種方式就是計(jì)算連通域進(jìn)行區(qū)域分析。
第一種(基于輪廓):在二值化后,對圖像尋找輪廓findContours,篩選出注水區(qū)域輪廓,然后通過drawContours對輪廓標(biāo)記。
第二種(基于區(qū)域):在二值化后,先對尋找圖像中的前景圖(即注水點(diǎn)),再尋找到背景圖(進(jìn)行膨脹),最后找到未知區(qū)域(背景減去前景,得到邊緣圖),通過connectedComponents()獲取標(biāo)記點(diǎn)。
相關(guān)API:
-
分水嶺函數(shù)watershed函數(shù)原型
-
void watershed( InputArray image, InputOutputArray markers );
第一個(gè)輸入參數(shù) image,必須是CV_8UC3類型圖像。
第二個(gè)輸入/輸出參數(shù)markers必須是32位單通道圖像。和image尺寸一樣。包含不同區(qū)域的輪廓,每個(gè)輪廓有一個(gè)自己唯一的編號。
在執(zhí)行watershed函數(shù)后,算法會根據(jù)markers傳入的輪廓作為種子,對圖像上其他的像素點(diǎn)根據(jù)分水嶺算法規(guī)則進(jìn)行判斷,并對每個(gè)像素點(diǎn)的區(qū)域歸屬進(jìn)行劃定,直到處理完圖像上所有像素點(diǎn)。而區(qū)域與區(qū)域之間的分界處的值被置為“-1”,以做區(qū)分。
-
距離變換函數(shù)distanceTransform函數(shù)原型
距離變換運(yùn)算用于計(jì)算二值化圖像中的每一個(gè)非零點(diǎn)距自己最近的零點(diǎn)的距離,距離變換圖像上越亮的點(diǎn),代表了這一點(diǎn)距離零點(diǎn)的距離越遠(yuǎn)。
距離變換通常用于求解圖像的骨骼和查找物體的質(zhì)心(即獲取距離變換的極大值)和計(jì)算非零像素到最近零像素點(diǎn)的最短距離。
distanceTransform( InputArray src, OutputArray dst, int distanceType, int maskSize,
int dstType = CV_32F
);
第一個(gè)輸入?yún)?shù)src,必須是CV_8UC1類型的二值圖像(只有0或1)
第二個(gè)輸出參數(shù)dst,表示的是計(jì)算距離的輸出圖像,輸出類型是CV_32F/CV_8U的單通道圖像,大小與輸入圖片相同。
第三個(gè)參數(shù)distanceType,表示的是選取距離的類型,可以設(shè)置為DIST_L1,DIST_L2,DIST_C
第四個(gè)參數(shù)maskSize,表示的是距離變換的掩膜模板,可以設(shè)置為3,5(常用3)
第四個(gè)參數(shù)dstType,表示輸出類型,可選擇CV_32F/CV_8U
注:若輸出類型為CV_32F,想要顯示距離變換后的骨架圖像,需要對其歸一化。(normalize)
先來看看第一種標(biāo)記mark(基于輪廓)的方法:
(一)讀入圖像,形態(tài)學(xué),二值化(消除噪聲)
Mat src, src_binary, dst, src_distance;
src = imread("D:/opencv練習(xí)圖片/維生素片機(jī)器視覺檢測和計(jì)數(shù).png");
imshow("原圖片", src);
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(src, dst, MORPH_OPEN, kernel);
imshow("形態(tài)學(xué)", dst);
cvtColor(dst, dst, COLOR_RGB2GRAY);
threshold(dst, src_binary, 100, 255, THRESH_OTSU);
imshow("二值化", src_binary);

(二)距離變換(歸一化顯示),再二值化
distanceTransform(src_binary, src_distance, DIST_L2, 3, 5);
normalize(src_distance, src_distance, 0, 1, NORM_MINMAX);
imshow("距離變換", src_distance);
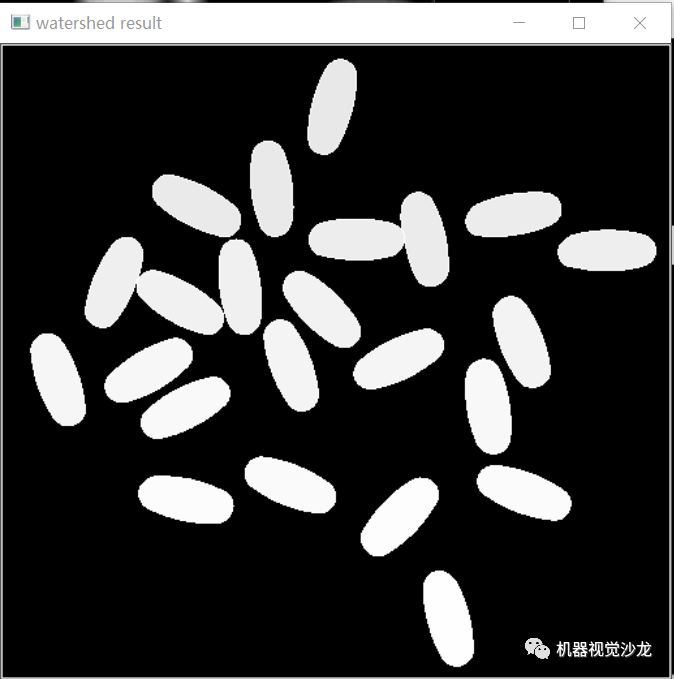
threshold(src_distance, src_distance, 0.4,1, THRESH_BINARY);
imshow("再二值化", src_distance);
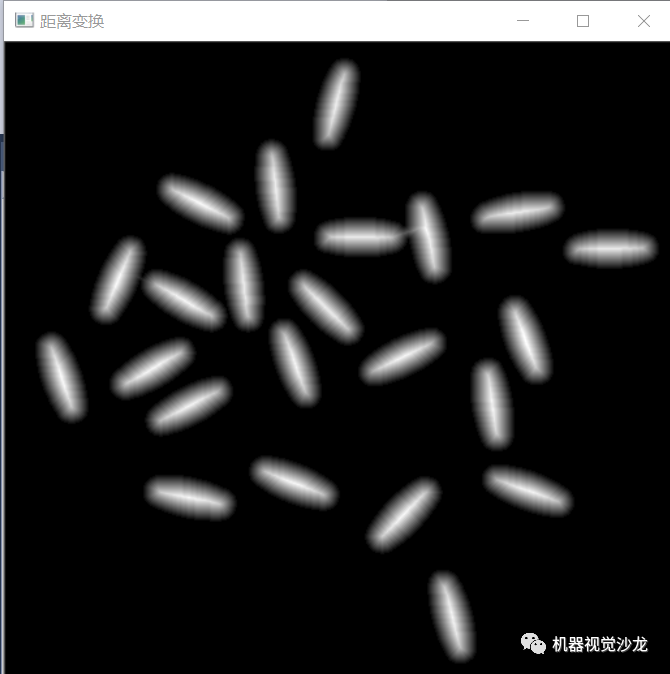

經(jīng)過距離變換后的二值化,可以清晰看到,藥片以及完全分割開來。
(三)打上標(biāo)簽(添加注水點(diǎn)),基于輪廓
//尋找標(biāo)記點(diǎn)marsk的輪廓信息 也就是分水嶺的水壩
src_distance.convertTo(src_distance, CV_8UC1);
vector<vector> contours;
findContours(src_distance, contours, RETR_TREE, CHAIN_APPROX_SIMPLE);
//創(chuàng)建maker
Mat markers = Mat::zeros(src.size(), CV_32S);// //因?yàn)榉炙畮X后的邊緣存儲是-1,所以必須使用有符號的CV_32S
for (size_t t = 0; t < contours.size(); t++)
{
drawContours(markers, contours, static_cast<int>(t), Scalar(static_cast<int>(t) + 1), -1);//輪廓數(shù)字編號
}
circle(markers, Point(5, 5), 30, Scalar(255), -1);//關(guān)鍵代碼(mark做一個(gè)小標(biāo)記)
int index1 = 0;
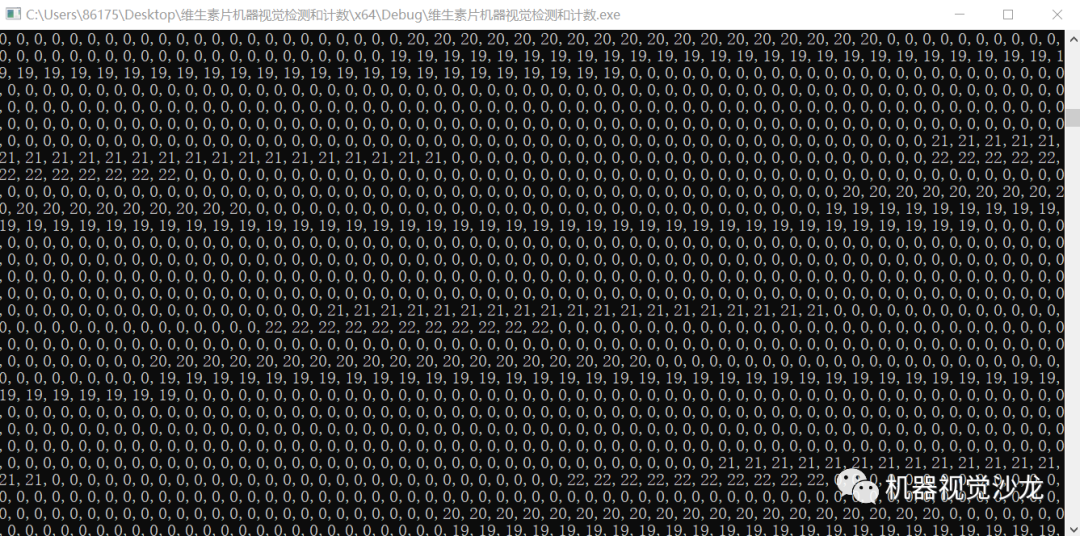
//打印輪廓數(shù)據(jù) 有值的均為輪廓線
for (int row = 0; row < markers.rows; row++)
for (int col = 0; col < markers.cols; col++)
{
index1 = markers.at<int>(row, col);
cout << index1 << ",";
}
部分標(biāo)簽markers輪廓數(shù)據(jù)截圖,可以看到0代表背景,輪廓線用正數(shù)索引標(biāo)識。
(四)進(jìn)行分水嶺操作,并給分水嶺后的區(qū)域隨機(jī)上色,并打印出檢測的藥片個(gè)數(shù)。
// 生成隨機(jī)顏色
vector colors;
for (size_t i = 0; i < contours.size(); i++) {
int r = theRNG().uniform(0, 255);
int g = theRNG().uniform(0, 255);
int b = theRNG().uniform(0, 255);
colors.push_back(Vec3b((uchar)b, (uchar)g, (uchar)r));
}
// 顏色填充與最終顯示
Mat dst1 = Mat::zeros(markers.size(), CV_8UC3);
int index = 0;
for (int row = 0; row < markers.rows; row++) {
for (int col = 0; col < markers.cols; col++) {
index = markers.at<int>(row, col);
if (index > 0 && index <= contours.size()) {
dst1.at(row, col) = colors[index - 1];
}
else {
dst1.at(row, col) = Vec3b(0, 0, 0);
}
}
}
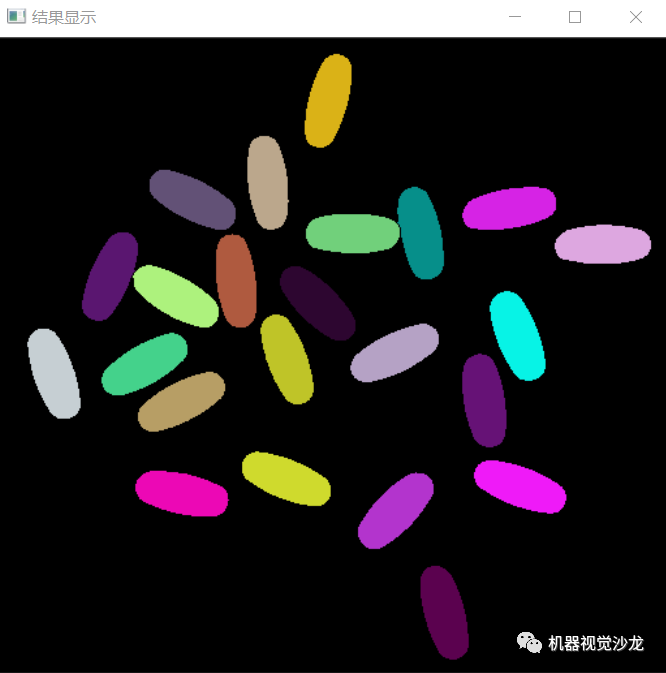
imshow("結(jié)果顯示", dst1);
printf("藥片檢測個(gè)數(shù): %d
", contours.size());
再來看看第二種標(biāo)記mark(基于區(qū)域)的方法:
(一)讀入圖像,形態(tài)學(xué),二值化(消除噪聲)
Mat foreground, background, unkonwn;//創(chuàng)建前景,背景,未知區(qū)域
Mat src, src_binary, dst, src_distance;
src = imread("D:/opencv練習(xí)圖片/維生素片機(jī)器視覺檢測和計(jì)數(shù).png");
imshow("原圖片", src);
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
morphologyEx(src, dst, MORPH_OPEN, kernel);
imshow("形態(tài)學(xué)", dst);
cvtColor(dst, dst, COLOR_RGB2GRAY);
threshold(dst, src_binary, 100, 255, THRESH_OTSU);
imshow("二值化", src_binary);
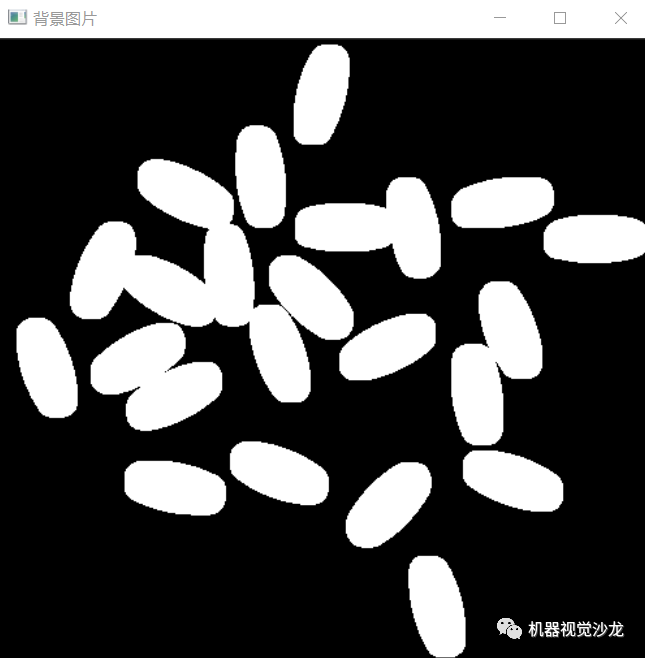
(二)對二值化圖像進(jìn)行膨脹操作,得到大部分是背景的圖片
//得到背景圖片
dilate(src_binary, background, kernel, Point(-1, -1), 3);
imshow("背景圖片",background);
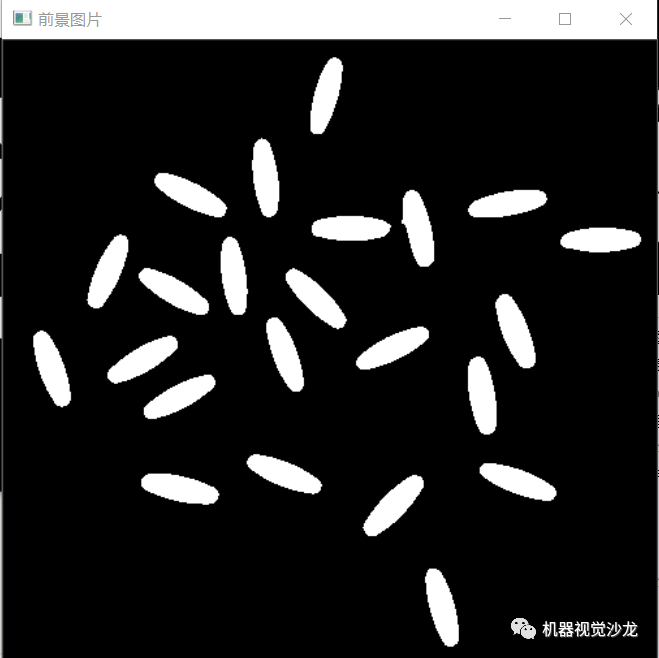
(三)通過對二值圖像距離變換得到前景圖片(即注水點(diǎn))
//距離變換
distanceTransform(src_binary, src_distance, DIST_L2, 3, 5);
imshow("距離變換", src_distance);
normalize(src_distance, src_distance, 0, 255, NORM_MINMAX);
double my_minv = 0.0, my_maxv = 0.0;
minMaxIdx(src_binary, &my_minv, &my_maxv);
threshold(src_distance, foreground, 0.4 * my_maxv, 255, THRESH_BINARY);
foreground.convertTo(foreground, CV_8U);
imshow("前景圖片", foreground);
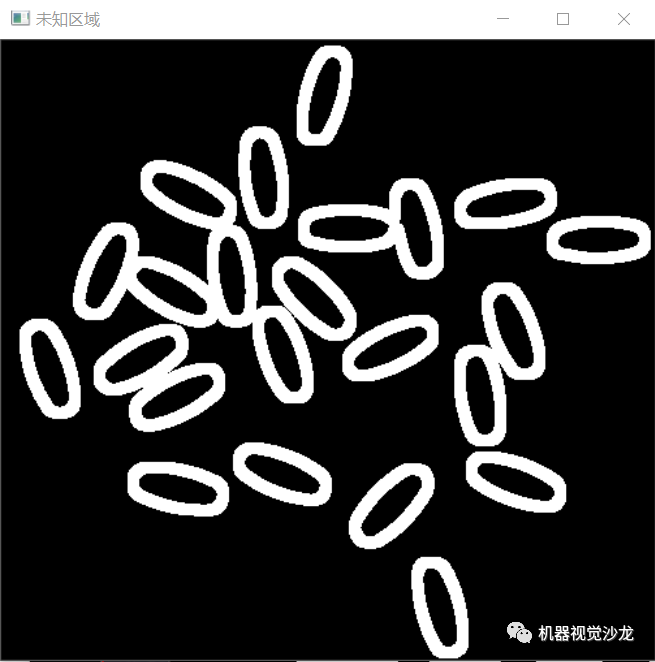
(四)通過背景與前景的差值,得到未知區(qū)域(即邊緣所在區(qū)域)
//得到未知區(qū)域
unkonwn = background - foreground;
imshow("未知區(qū)域",unkonwn);
(五)得到這些區(qū)域以后,我們可以獲取注水點(diǎn)的標(biāo)簽,通過connectedComponents實(shí)現(xiàn)(即獲取markers標(biāo)簽)
//創(chuàng)建標(biāo)記點(diǎn)markers
Mat markers = Mat(src.size(), CV_32S);
int num = connectedComponents(foreground, markers, 8);
cout << num << endl;
markers = markers + 1;
for (int i = 0; i < unkonwn.rows; i++)
{
for (int j = 0; j < unkonwn.cols; j++)
{
if (((int)unkonwn.at(i, j)) == 255)
{
markers.at<signed int>(i, j) = 0;
}
}
}
詳細(xì)理解該步驟:
現(xiàn)在我們已經(jīng)知道哪些是背景,哪些是藥片(前景區(qū)域)。
因此我們可以創(chuàng)建一個(gè)標(biāo)簽(和原圖大小,類型為CV_32S),通過connectedComponents函數(shù)對前景區(qū)域進(jìn)行標(biāo)記
連通域相關(guān)博文:opencv——連通域標(biāo)記與分析 - 唯有自己強(qiáng)大 - 博客園 (cnblogs.com)
該函數(shù)會對前景區(qū)域連通域分析,并將背景設(shè)定為0,其他區(qū)域從1開始正整數(shù)標(biāo)記(這就是我們的種子,水漫時(shí)會從這里漫出),結(jié)果返回給markers。
但是對于分水嶺算法,會將為0的區(qū)域認(rèn)為是未知區(qū)域,因此要markers整體加一。
(六)進(jìn)行分水嶺操作,并顯示邊緣
watershed(src, markers);
for (int row = 0; row < markers.rows; row++)
{
for (int col = 0; col < markers.cols; col++)
{
if (markers.at< int>(row, col) == -1)
{
src.at(row, col) = Vec3b(0, 0, 255);
}
}
}
imshow("結(jié)果", src);
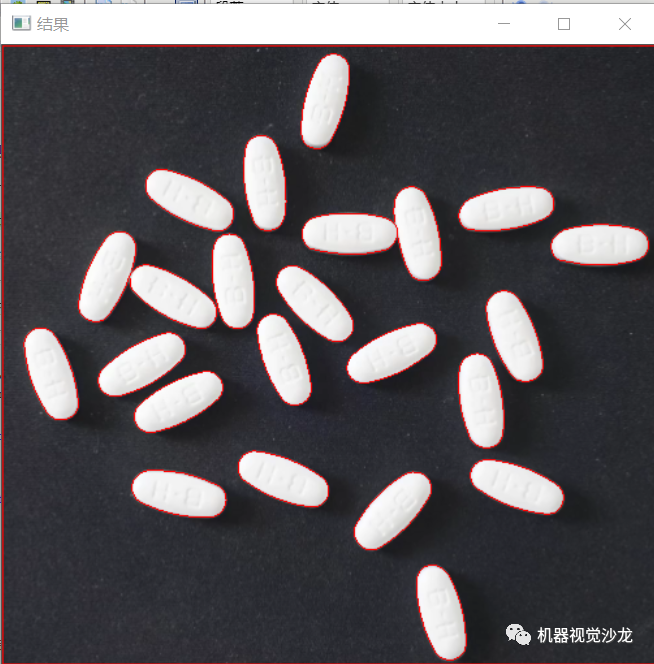
由于分水嶺算法會將找到的邊緣在markers置為-1,因此我們對原圖操作,將索引為-1的位置的像素值改為紅色(即顯示邊緣)。
參考鏈接:OpenCV---分水嶺算法 - 山上有風(fēng)景 -
(8條消息) c++和opencv小知識:基于距離變換的分水嶺算法(固定流程)_夢游城市的博客
(8條消息) OpenCV分水嶺算法圖像分割_冰冰bing的博客-
審核編輯 :李倩
-
機(jī)器視覺
+關(guān)注
關(guān)注
162文章
4406瀏覽量
120735 -
檢測
+關(guān)注
關(guān)注
5文章
4512瀏覽量
91748 -
OpenCV
+關(guān)注
關(guān)注
31文章
635瀏覽量
41557
原文標(biāo)題:opencv實(shí)戰(zhàn)——機(jī)器視覺檢測和計(jì)數(shù)
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
Opencv計(jì)數(shù)程序詳解

基于labview機(jī)器視覺的機(jī)件計(jì)數(shù)系統(tǒng)設(shè)計(jì)
機(jī)器視覺表面缺陷檢測技術(shù)
機(jī)器視覺行業(yè)常用視覺軟件介紹
機(jī)器視覺檢測設(shè)備的優(yōu)勢
深圳機(jī)器視覺檢測項(xiàng)目包括哪些?
基于opencv的扎針機(jī)器人視覺導(dǎo)航
機(jī)器視覺軟件OpenCV的軟件安裝與使用教程說明
機(jī)器視覺檢測技術(shù)的分類
怎么樣使用Opencv實(shí)現(xiàn)工業(yè)視覺檢測系統(tǒng)的設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論