") 相機標定之四個坐標系之間的變換關系
相機標定之四個坐標系之間的變換關系
世界坐標系,相機坐標系,圖像物理坐標系,像素坐標系之間的關系:
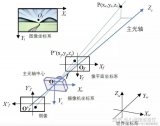
首先看下幾個坐標系在放在一塊的樣子:
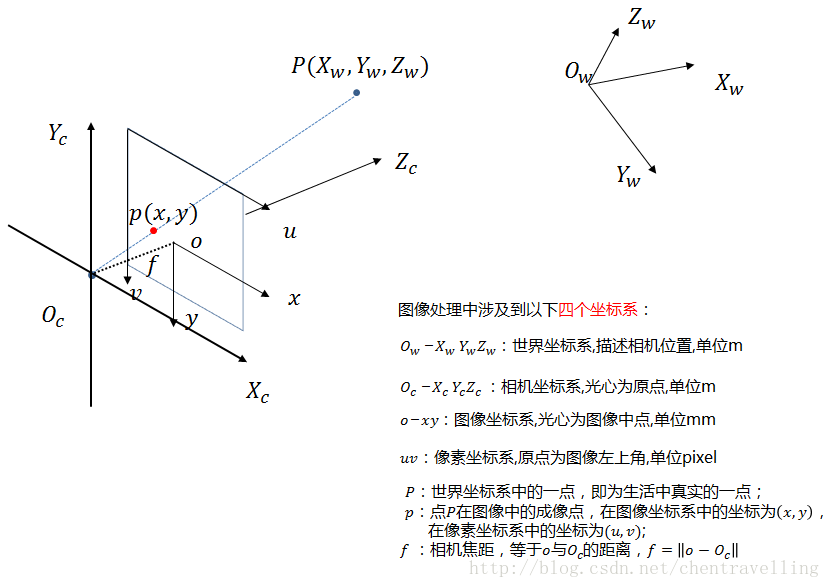
1:世界坐標系:根據(jù)情況而定,可以表示任何物體,此時是由于相機而引入的。單位m。
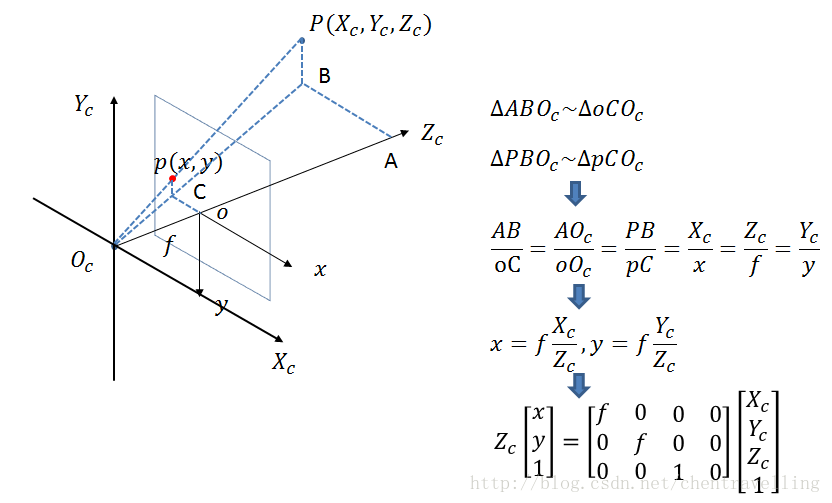
2:相機坐標系:以攝像機光心為原點(在針孔模型中也就是針孔為關心),z軸與光軸重合也就是z軸指向相機的前方(也就是與成像平面垂直),x軸與y軸的正方向與物體坐標系平行,其中上圖中的f為攝像機的焦距。單位m
3:圖像物理坐標系(也叫平面坐標系):用物理單位表示像素的位置,坐標原點為攝像機光軸與圖像物理坐標系的交點位置。坐標系為圖上o-xy。單位是mm。單位毫米的原因是此時由于相機內部的CCD傳感器是很小的,比如8mm x 6mm。但是最后圖像照片是也像素為單位比如640x480.這就涉及到了圖像物理坐標系與像素坐標系的變換了。下面的像素坐標系將會講到。
4:像素坐標系:以像素為單位,坐標原點在左上角。這也是一些opencv,OpenGL等庫的坐標原點選在左上角的原因。當然明顯看出CCD傳感器以mm單位到像素中間有轉換的。舉個例子,CCD傳感上上面的8mm x 6mm,轉換到像素大小是640x480. 假如dx表示像素坐標系中每個像素的物理大小就是1/80. 也就是說毫米與像素點的之間關系是piexl/mm.
好了四個坐標系都解釋完了,接下來就說下各個坐標系中間的變換關系吧。
一:世界坐標到相機坐標系
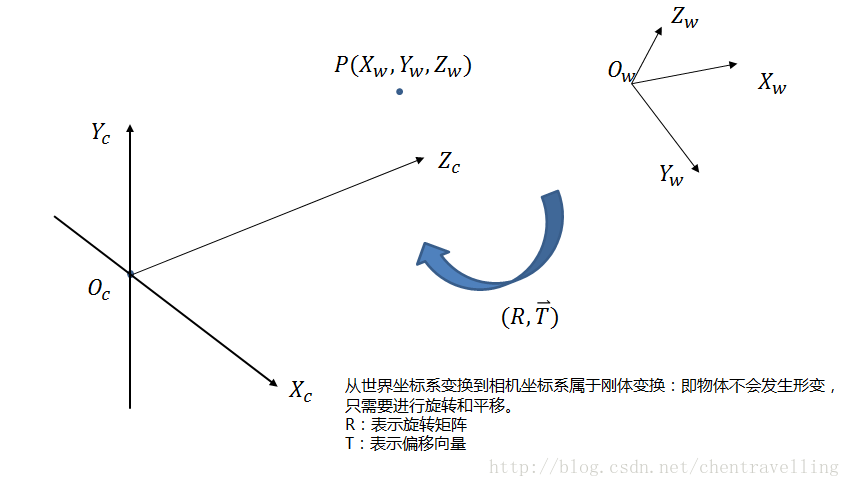
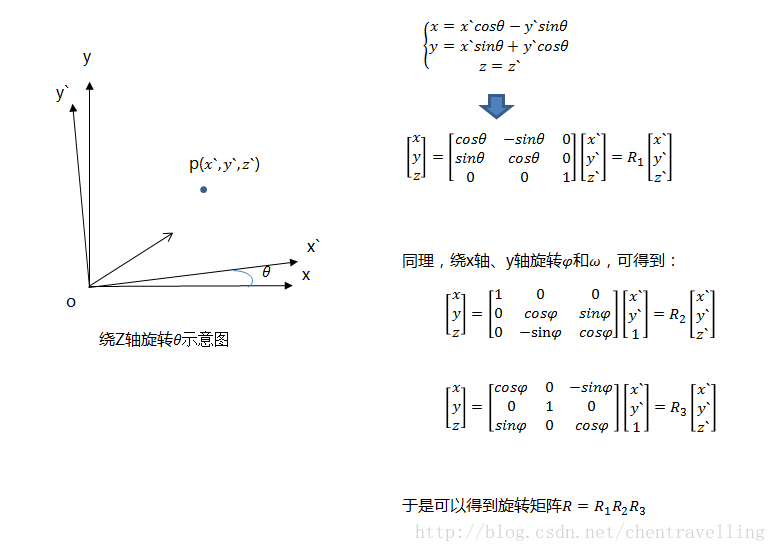
物體之間的坐標系變換都可以表示坐標系的旋轉變換加上平移變換,則世界坐標系到相機坐標系的轉換關系也是如此。繞著不同的軸旋轉不同的角度得到不同的旋轉矩陣。如下:
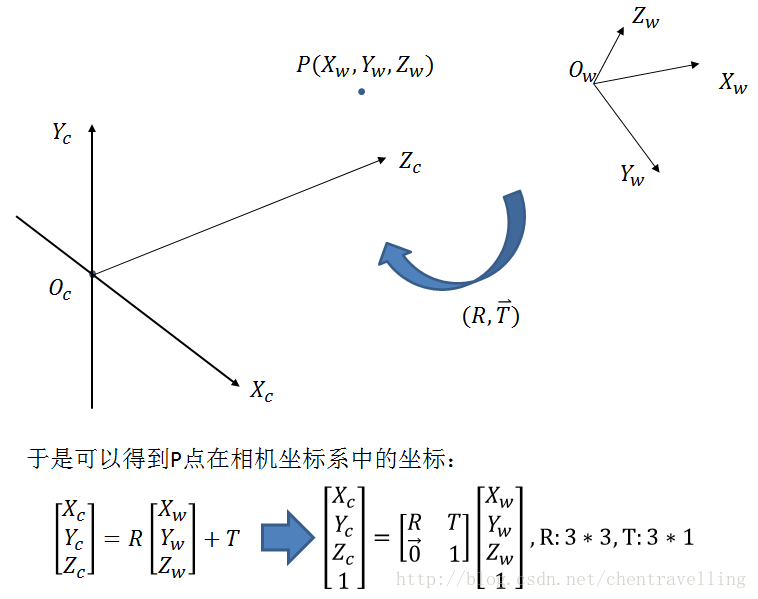
那么世界坐標系到相機坐標系的變換如下:
二:相機坐標系到圖像物理坐標系
從相機坐標系到圖像坐標系,屬于透視投影關系,從3D轉換到2D。也可以看成是針孔模型的改變模型。滿足三角形的相似定理。
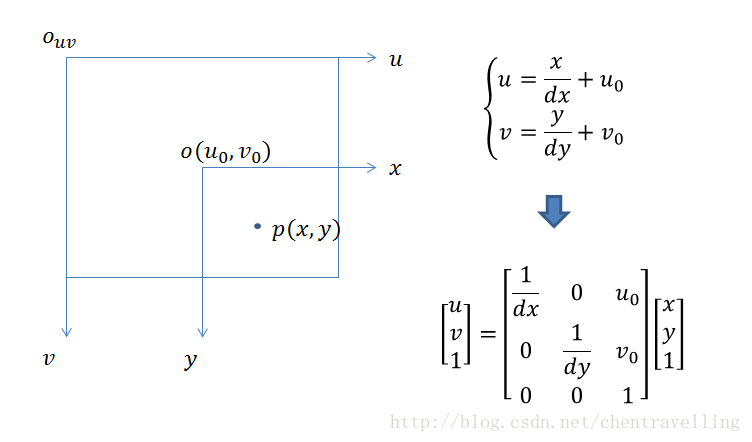
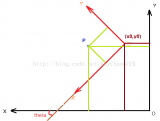
三:圖像物理坐標系到像素坐標系。
此時與前面的坐標系變換不同,此時沒有旋轉變換,但是坐標原點位置不一致,大小不一致,則設計伸縮變換及平移變換。
綜上所述,大家可以看出四個坐標系之間存在著下述關系 ( 矩陣依次左乘 )
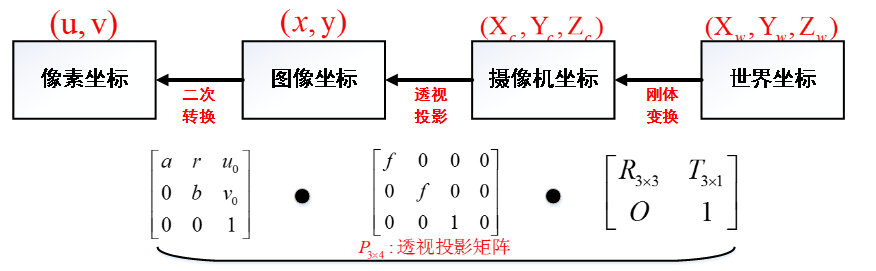
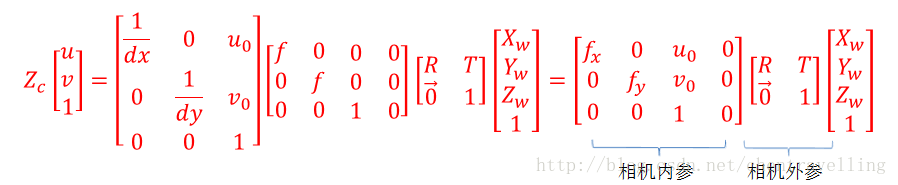
其中相機的內參和外參可以通過張正友標定獲取。通過最終的轉換關系來看,一個三維中的坐標點,的確可以在圖像中找到一個對應的像素點,但是反過來,通過圖像中的一個點找到它在三維中對應的點就很成了一個問題,因為我們并不知道等式左邊的Zc的值。
審核編輯:湯梓紅
-
傳感器
+關注
關注
2553文章
51386瀏覽量
756546 -
攝像機
+關注
關注
3文章
1618瀏覽量
60313 -
圖像
+關注
關注
2文章
1089瀏覽量
40569 -
相機
+關注
關注
4文章
1367瀏覽量
53913 -
坐標系
+關注
關注
0文章
29瀏覽量
7356
原文標題:【相機標定】四個坐標系之間的變換關系
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
abb機器人工具坐標系問題
解決電壓方程在靜止坐標系與運動坐標系轉換問題
介紹坐標系和機器人之間的紐帶即連桿坐標系
非正交坐標系中轉子振動的測量
基于小波變換的雙目系統(tǒng)標定研究與實現(xiàn)

機器人基坐標系標定方法研究
?多相機視覺系統(tǒng)的坐標系統(tǒng)標定與統(tǒng)一及其應用

淺談自動駕駛技術常用坐標系統(tǒng)關聯(lián)和轉換
工業(yè)現(xiàn)場相機坐標系和機械手坐標系的標定

應用衛(wèi)星通信領域的一個坐標轉換過程—機體坐標系與ENU坐標系的轉換






 工商網監(jiān)
工商網監(jiān)
評論