") DCM技術(shù)加持汽車?yán)走_(dá),推進(jìn)更精準(zhǔn)自動(dòng)駕駛傳感實(shí)現(xiàn)
DCM技術(shù)加持汽車?yán)走_(dá),推進(jìn)更精準(zhǔn)自動(dòng)駕駛傳感實(shí)現(xiàn)
電子發(fā)燒友網(wǎng)報(bào)道(文/李寧遠(yuǎn))目前的汽車輔助駕駛中基本都以雷達(dá)和攝像頭為基礎(chǔ)框架,覆蓋各種短程、中程以及遠(yuǎn)程的環(huán)境感知。
汽車?yán)走_(dá)通過對(duì)目標(biāo)物體發(fā)射并接收電磁波,感知目標(biāo)距離電磁波發(fā)射點(diǎn)的距離、多普勒頻率、方位角、仰角等各種信息。汽車?yán)走_(dá)是汽車實(shí)現(xiàn)更高級(jí)別自動(dòng)駕駛功能過程中必不可少的一類基礎(chǔ)傳感器。
按照信號(hào)分類,雷達(dá)通常有兩種基本類型,連續(xù)波CW雷達(dá)和脈沖雷達(dá)。簡(jiǎn)單的連續(xù)波CW雷達(dá)只能分辨被測(cè)物體的速度,缺乏對(duì)距離感測(cè)。因此通過調(diào)頻對(duì)CW雷達(dá)進(jìn)行增強(qiáng),也就是調(diào)頻連續(xù)波FMCW雷達(dá),調(diào)頻技術(shù)給CW雷達(dá)帶來了檢測(cè)距離、檢測(cè)速度以及區(qū)分多個(gè)目標(biāo)的能力。
DCM雷達(dá)進(jìn)入汽車領(lǐng)域,實(shí)現(xiàn)分辨率和準(zhǔn)確度提升
此前大部分汽車?yán)走_(dá)都采用調(diào)頻連續(xù)波FMCW技術(shù),F(xiàn)MCW雷達(dá)的低頻輸出在簡(jiǎn)單的模擬檢測(cè)電路中即可實(shí)現(xiàn),可以在相對(duì)較低的功率下工作,這是其優(yōu)勢(shì)。
但是FMCW雷達(dá)會(huì)受到發(fā)射功率、天線效率和接收機(jī)靈敏度的限制,另一方面來看,F(xiàn)MCW信號(hào)帶寬限制了雷達(dá)的最大距離導(dǎo)致在距離分辨率方面不是那么盡如人意。
隨著自動(dòng)駕駛等級(jí)不斷提高,對(duì)雷達(dá)分辨率和精確度的要求也在提高,更為先進(jìn)的數(shù)字編碼調(diào)制DCM技術(shù)雷達(dá)開始被汽車廠商關(guān)注。DCM雷達(dá)此前價(jià)格一直較為高昂,是軍工領(lǐng)域的常客。
得益于CMOS技術(shù)和先進(jìn)信號(hào)處理技術(shù)的進(jìn)步,性價(jià)比高的數(shù)字編碼調(diào)制DCM雷達(dá)開始拓寬應(yīng)用場(chǎng)景,有了進(jìn)入汽車領(lǐng)域的可能性。
DCM數(shù)字編碼調(diào)制雷達(dá),是一種將數(shù)字信號(hào)調(diào)制到正弦波的相位上進(jìn)行探測(cè)的雷達(dá)。這種雷達(dá)的接收機(jī)可以使用匹配濾波器進(jìn)行距離處理,處理各種時(shí)延相關(guān)的問題。匹配濾波器更大的帶寬能夠讓DCM雷達(dá)產(chǎn)生更小的寬度尖峰和更好的距離分辨率,讓汽車?yán)走_(dá)整體的分辨率和準(zhǔn)確度大大提升。
DCM雷達(dá)還有一個(gè)很有特性的性能,就是尖峰峰值銳度很高,相比FMCW的FFT算法,能夠極大提升雷達(dá)的區(qū)分目標(biāo)的能力。
車用DCM雷達(dá)芯片與FMCW雷達(dá)芯片對(duì)比
車用DCM雷達(dá)由Uhnder引入市場(chǎng),以Uhnder的DCM雷達(dá)芯片為例,單DCM雷達(dá)芯片能提供192個(gè)虛擬通道,比市面上常見單FMCW雷達(dá)芯片可提供的虛擬通道要多一些。如果通過級(jí)聯(lián)提高虛擬通道數(shù)量二者能實(shí)現(xiàn)的最高通道其實(shí)差別不大,但是DCM芯片級(jí)聯(lián)所需的芯片數(shù)量少,在雷達(dá)系統(tǒng)復(fù)雜度和功耗上會(huì)更占優(yōu)勢(shì)。
另一方面,干擾是FMCW雷達(dá)信號(hào)常常碰到的困難,汽車?yán)走_(dá)發(fā)出的信號(hào)會(huì)相互干擾影響探測(cè)。DCM雷達(dá)芯片發(fā)射的信號(hào)有唯一的擴(kuò)頻序列,只有同序列的信號(hào)才會(huì)被放大,不同序列的信號(hào)會(huì)被抑制,可以大大減輕信號(hào)相互干擾的問題。
雖然DCM雷達(dá)芯片的帶寬很高,但是所需的A/D轉(zhuǎn)換器卻不是想象中那么復(fù)雜高功率的,Uhnder已經(jīng)證明了DCM雷達(dá)芯片所需的低功耗高速ADC在CMOS的射頻設(shè)計(jì)中是可行的。因此就功率來說無論是單DCM雷達(dá)芯片還是級(jí)聯(lián)之后,都并不是那么高。相同分辨率下,DCM在功率上的優(yōu)勢(shì)還是很明顯的。
而從模擬和信號(hào)處理上來看,F(xiàn)MCW為了應(yīng)對(duì)虛擬接收機(jī)數(shù)量的增加需要大量的模擬處理,但是信號(hào)又只有少部分在模擬電路完成,一般都需要配單獨(dú)的數(shù)字處理芯片。DCM僅需要少量的模擬電路,信號(hào)大部分都在數(shù)字電路通過更先進(jìn)的算法完成。整個(gè)雷達(dá)電路的設(shè)計(jì)復(fù)雜度是不可同日而語的。
成本下探后的DCM雷達(dá),將這些優(yōu)勢(shì)帶入汽車領(lǐng)域,能夠?yàn)樽詣?dòng)駕駛技術(shù)提供更精確的數(shù)字感知。
寫在最后
對(duì)于自動(dòng)駕駛而言,不管多高深多復(fù)雜的算法技術(shù)都建立在能獲取可靠的數(shù)據(jù)基礎(chǔ)上。如何提高汽車傳感器數(shù)據(jù)的精準(zhǔn)度是自動(dòng)駕駛升級(jí)的關(guān)鍵,DCM數(shù)字雷達(dá)無疑能對(duì)自動(dòng)駕駛精準(zhǔn)傳感的實(shí)現(xiàn)起到推進(jìn)作用。
汽車?yán)走_(dá)通過對(duì)目標(biāo)物體發(fā)射并接收電磁波,感知目標(biāo)距離電磁波發(fā)射點(diǎn)的距離、多普勒頻率、方位角、仰角等各種信息。汽車?yán)走_(dá)是汽車實(shí)現(xiàn)更高級(jí)別自動(dòng)駕駛功能過程中必不可少的一類基礎(chǔ)傳感器。
按照信號(hào)分類,雷達(dá)通常有兩種基本類型,連續(xù)波CW雷達(dá)和脈沖雷達(dá)。簡(jiǎn)單的連續(xù)波CW雷達(dá)只能分辨被測(cè)物體的速度,缺乏對(duì)距離感測(cè)。因此通過調(diào)頻對(duì)CW雷達(dá)進(jìn)行增強(qiáng),也就是調(diào)頻連續(xù)波FMCW雷達(dá),調(diào)頻技術(shù)給CW雷達(dá)帶來了檢測(cè)距離、檢測(cè)速度以及區(qū)分多個(gè)目標(biāo)的能力。
DCM雷達(dá)進(jìn)入汽車領(lǐng)域,實(shí)現(xiàn)分辨率和準(zhǔn)確度提升
此前大部分汽車?yán)走_(dá)都采用調(diào)頻連續(xù)波FMCW技術(shù),F(xiàn)MCW雷達(dá)的低頻輸出在簡(jiǎn)單的模擬檢測(cè)電路中即可實(shí)現(xiàn),可以在相對(duì)較低的功率下工作,這是其優(yōu)勢(shì)。
但是FMCW雷達(dá)會(huì)受到發(fā)射功率、天線效率和接收機(jī)靈敏度的限制,另一方面來看,F(xiàn)MCW信號(hào)帶寬限制了雷達(dá)的最大距離導(dǎo)致在距離分辨率方面不是那么盡如人意。
隨著自動(dòng)駕駛等級(jí)不斷提高,對(duì)雷達(dá)分辨率和精確度的要求也在提高,更為先進(jìn)的數(shù)字編碼調(diào)制DCM技術(shù)雷達(dá)開始被汽車廠商關(guān)注。DCM雷達(dá)此前價(jià)格一直較為高昂,是軍工領(lǐng)域的常客。
得益于CMOS技術(shù)和先進(jìn)信號(hào)處理技術(shù)的進(jìn)步,性價(jià)比高的數(shù)字編碼調(diào)制DCM雷達(dá)開始拓寬應(yīng)用場(chǎng)景,有了進(jìn)入汽車領(lǐng)域的可能性。
DCM數(shù)字編碼調(diào)制雷達(dá),是一種將數(shù)字信號(hào)調(diào)制到正弦波的相位上進(jìn)行探測(cè)的雷達(dá)。這種雷達(dá)的接收機(jī)可以使用匹配濾波器進(jìn)行距離處理,處理各種時(shí)延相關(guān)的問題。匹配濾波器更大的帶寬能夠讓DCM雷達(dá)產(chǎn)生更小的寬度尖峰和更好的距離分辨率,讓汽車?yán)走_(dá)整體的分辨率和準(zhǔn)確度大大提升。
DCM雷達(dá)還有一個(gè)很有特性的性能,就是尖峰峰值銳度很高,相比FMCW的FFT算法,能夠極大提升雷達(dá)的區(qū)分目標(biāo)的能力。
車用DCM雷達(dá)芯片與FMCW雷達(dá)芯片對(duì)比
車用DCM雷達(dá)由Uhnder引入市場(chǎng),以Uhnder的DCM雷達(dá)芯片為例,單DCM雷達(dá)芯片能提供192個(gè)虛擬通道,比市面上常見單FMCW雷達(dá)芯片可提供的虛擬通道要多一些。如果通過級(jí)聯(lián)提高虛擬通道數(shù)量二者能實(shí)現(xiàn)的最高通道其實(shí)差別不大,但是DCM芯片級(jí)聯(lián)所需的芯片數(shù)量少,在雷達(dá)系統(tǒng)復(fù)雜度和功耗上會(huì)更占優(yōu)勢(shì)。
另一方面,干擾是FMCW雷達(dá)信號(hào)常常碰到的困難,汽車?yán)走_(dá)發(fā)出的信號(hào)會(huì)相互干擾影響探測(cè)。DCM雷達(dá)芯片發(fā)射的信號(hào)有唯一的擴(kuò)頻序列,只有同序列的信號(hào)才會(huì)被放大,不同序列的信號(hào)會(huì)被抑制,可以大大減輕信號(hào)相互干擾的問題。
雖然DCM雷達(dá)芯片的帶寬很高,但是所需的A/D轉(zhuǎn)換器卻不是想象中那么復(fù)雜高功率的,Uhnder已經(jīng)證明了DCM雷達(dá)芯片所需的低功耗高速ADC在CMOS的射頻設(shè)計(jì)中是可行的。因此就功率來說無論是單DCM雷達(dá)芯片還是級(jí)聯(lián)之后,都并不是那么高。相同分辨率下,DCM在功率上的優(yōu)勢(shì)還是很明顯的。
而從模擬和信號(hào)處理上來看,F(xiàn)MCW為了應(yīng)對(duì)虛擬接收機(jī)數(shù)量的增加需要大量的模擬處理,但是信號(hào)又只有少部分在模擬電路完成,一般都需要配單獨(dú)的數(shù)字處理芯片。DCM僅需要少量的模擬電路,信號(hào)大部分都在數(shù)字電路通過更先進(jìn)的算法完成。整個(gè)雷達(dá)電路的設(shè)計(jì)復(fù)雜度是不可同日而語的。
成本下探后的DCM雷達(dá),將這些優(yōu)勢(shì)帶入汽車領(lǐng)域,能夠?yàn)樽詣?dòng)駕駛技術(shù)提供更精確的數(shù)字感知。
寫在最后
對(duì)于自動(dòng)駕駛而言,不管多高深多復(fù)雜的算法技術(shù)都建立在能獲取可靠的數(shù)據(jù)基礎(chǔ)上。如何提高汽車傳感器數(shù)據(jù)的精準(zhǔn)度是自動(dòng)駕駛升級(jí)的關(guān)鍵,DCM數(shù)字雷達(dá)無疑能對(duì)自動(dòng)駕駛精準(zhǔn)傳感的實(shí)現(xiàn)起到推進(jìn)作用。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
DCM
+關(guān)注
關(guān)注
0文章
160瀏覽量
26578 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
785文章
13932瀏覽量
167016
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
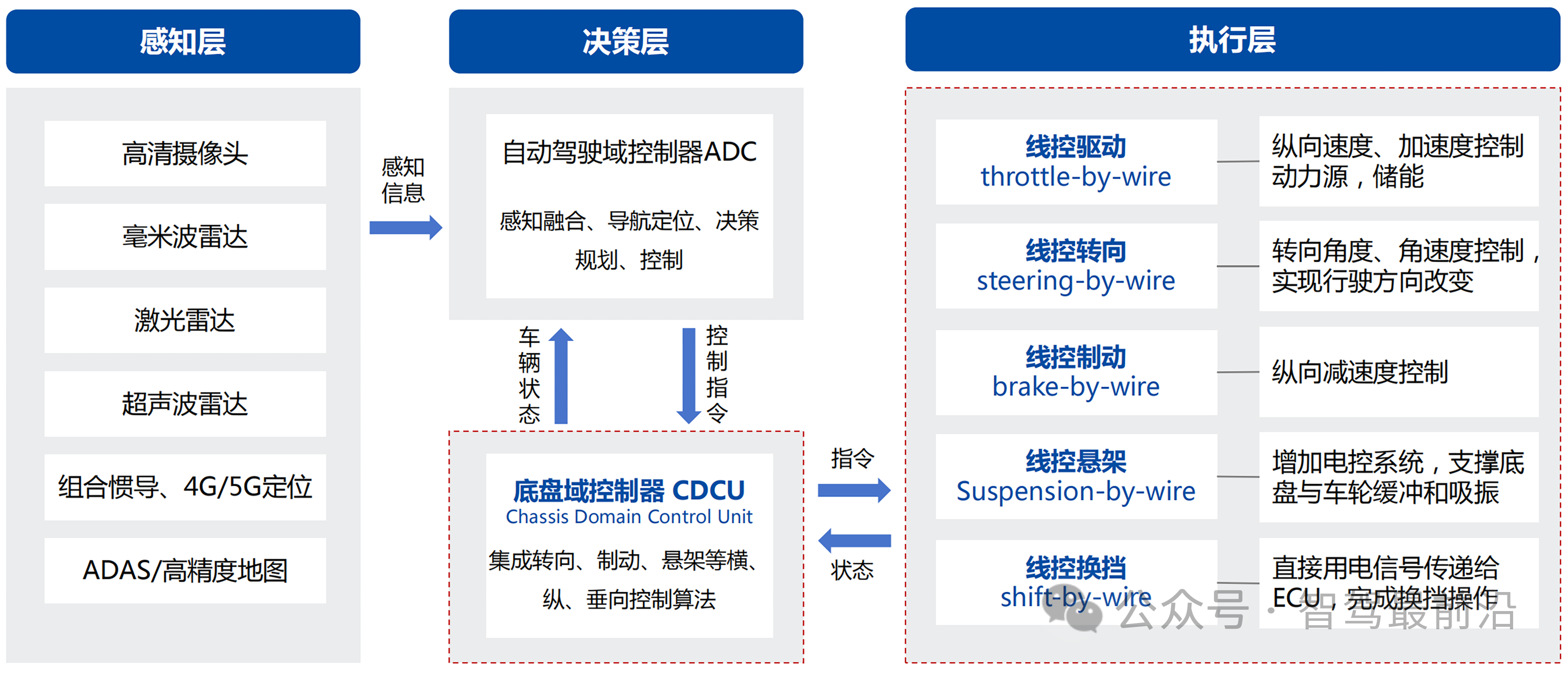
線控底盤如何讓自動(dòng)駕駛加速奔跑?
線控底盤技術(shù)是智能駕駛系統(tǒng)的核心技術(shù)之一,通過電子信號(hào)取代傳統(tǒng)的機(jī)械傳動(dòng),實(shí)現(xiàn)車輛動(dòng)力、轉(zhuǎn)向、制動(dòng)、懸架及換擋等功能的精準(zhǔn)控制。它不僅是
MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用
MEMS技術(shù)在自動(dòng)駕駛汽車中的應(yīng)用主要體現(xiàn)在傳感器方面,這些傳感器為自動(dòng)駕駛
汽車雷達(dá)回波發(fā)生器的技術(shù)原理和應(yīng)用場(chǎng)景
的波束并向前傳播,以模擬真實(shí)的雷達(dá)工作環(huán)境。應(yīng)用場(chǎng)景
自動(dòng)駕駛系統(tǒng)的開發(fā)和測(cè)試:在自動(dòng)駕駛系統(tǒng)的開發(fā)和測(cè)試過程中,汽車電子雷達(dá)回波發(fā)生器可以
發(fā)表于 11-15 14:06
自動(dòng)駕駛汽車安全嗎?
隨著未來汽車變得更加互聯(lián),汽車逐漸變得更加依賴技術(shù),并且逐漸變得更加自動(dòng)化——最終實(shí)現(xiàn)自動(dòng)駕駛,

自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)涉及到哪些技術(shù)
自動(dòng)駕駛技術(shù)的典型應(yīng)用 自動(dòng)駕駛技術(shù)是一種依賴計(jì)算機(jī)、無人駕駛設(shè)備以及各種傳感器,
FPGA在自動(dòng)駕駛領(lǐng)域有哪些優(yōu)勢(shì)?
需更換整個(gè)硬件平臺(tái)。
綜上所述,F(xiàn)PGA在自動(dòng)駕駛領(lǐng)域具有高性能、靈活性、低延遲、高能效比、硬件級(jí)安全、易于集成與擴(kuò)展以及長(zhǎng)期可維護(hù)性等顯著優(yōu)勢(shì)。這些優(yōu)勢(shì)使得FPGA成為自動(dòng)駕駛技術(shù)中不可或缺的一部分,為
發(fā)表于 07-29 17:11
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
低,適合用于實(shí)現(xiàn)高效的圖像算法,如車道線檢測(cè)、交通標(biāo)志識(shí)別等。
雷達(dá)和LiDAR處理:自動(dòng)駕駛汽車通常會(huì)使用雷達(dá)和LiDAR(激光
發(fā)表于 07-29 17:09
自動(dòng)駕駛汽車如何識(shí)別障礙物
自動(dòng)駕駛汽車識(shí)別障礙物是一個(gè)復(fù)雜而關(guān)鍵的過程,它依賴于多種傳感器和技術(shù)的協(xié)同工作。這些傳感器主要包括激光
自動(dòng)駕駛的傳感器技術(shù)介紹
自動(dòng)駕駛的傳感器技術(shù)是自動(dòng)駕駛系統(tǒng)的核心組成部分,它使車輛能夠感知并理解周圍環(huán)境,從而做出智能決策。以下是對(duì)自動(dòng)駕駛
自動(dòng)駕駛汽車傳感器有哪些
自動(dòng)駕駛汽車傳感器是實(shí)現(xiàn)自動(dòng)駕駛功能的關(guān)鍵組件,它們通過采集和處理車輛周圍環(huán)境的信息,為自動(dòng)駕駛
揭秘自動(dòng)駕駛:未來汽車的感官革命,究竟需要哪些超級(jí)傳感器?
,激光雷達(dá)技術(shù)受到極大關(guān)注,被譽(yù)為“激光雷達(dá)元年”,凸顯了傳感器在自動(dòng)駕駛中的重要性。那么,自動(dòng)駕駛
特斯拉在華推進(jìn)全自動(dòng)駕駛
特斯拉自動(dòng)駕駛技術(shù)入華成為市場(chǎng)焦點(diǎn)。馬斯克提出的“無人駕駛出租車”概念正引領(lǐng)特斯拉在中國市場(chǎng)加速推進(jìn)自動(dòng)駕駛
未來已來,多傳感器融合感知是自動(dòng)駕駛破局的關(guān)鍵
駕駛的關(guān)鍵的是具備人類的感知能力,多傳感器融合感知正是自動(dòng)駕駛破局的關(guān)鍵。昱感微的雷視一體多傳感器融合方案就好像一雙比人眼更敏銳的眼睛,可以為自動(dòng)駕
發(fā)表于 04-11 10:26
自動(dòng)駕駛汽車技術(shù) | 車載雷達(dá)系統(tǒng)
自動(dòng)駕駛汽車技術(shù) | 車載雷達(dá)系統(tǒng)

自動(dòng)駕駛發(fā)展問題及解決方案淺析
汽車的發(fā)展提供有益的參考。 ? 自動(dòng)駕駛汽車發(fā)展的現(xiàn)狀與挑戰(zhàn) (一)技術(shù)難題 自動(dòng)駕駛汽車的核心





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論