") ROS移動(dòng)機(jī)器人的通信接口電路設(shè)計(jì)
ROS移動(dòng)機(jī)器人的通信接口電路設(shè)計(jì)
本文來聊聊ROS移動(dòng)機(jī)器人中控制器與樹莓派進(jìn)行傳輸信號的通信接口電路設(shè)計(jì)。在此之前回顧下在本項(xiàng)目第一篇文章中提到的硬件框圖,如下圖所示:
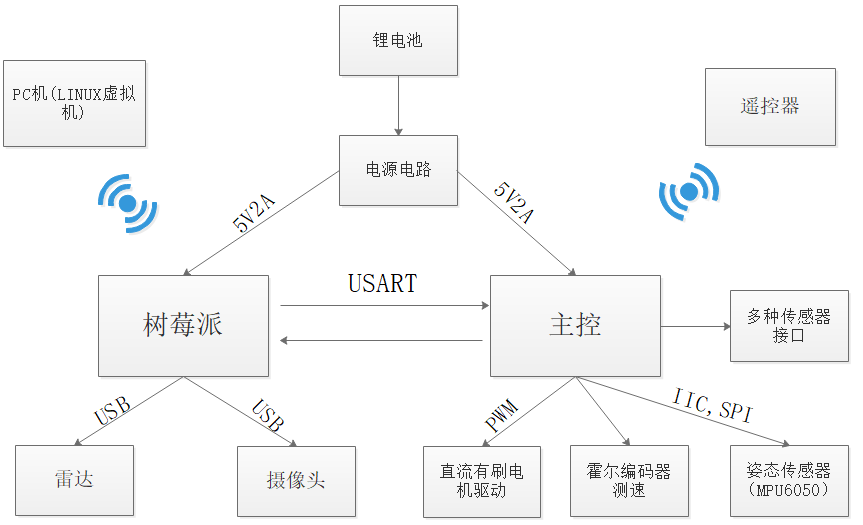
從圖中可以清楚地看出,樹莓派通過wifi和PC機(jī)通信,同時(shí)樹莓派通過串口與控制器通信。 目前市面上的樹莓派3B,4B在電路設(shè)計(jì)時(shí)已經(jīng)加入了WIFI模塊,可以通過編程與PC機(jī)通信,這里的電路設(shè)計(jì)我們不用考慮。 樹莓派與主控進(jìn)行通信時(shí)需要使用USART通信協(xié)議。 此時(shí)常用的方法是使用TTL模塊將USB協(xié)議轉(zhuǎn)成USART協(xié)議,這時(shí)就不可避免的在樹莓派上插入U(xiǎn)SB轉(zhuǎn)TTL模塊,然后通過杜邦線與主控連接。
使用這種方法,看似方便,但是系統(tǒng)的整體布線看起來會顯得非常凌亂,還會存在接觸不良的問題,引起控制系統(tǒng)的不穩(wěn)定。 對于電路設(shè)計(jì)集成度和完美主義追求者,這點(diǎn)是不能容忍的。 所以在控制器設(shè)計(jì)中,直接將通信協(xié)議轉(zhuǎn)換電路集成到了PCB板中,提高了系統(tǒng)集成度和系統(tǒng)的穩(wěn)定性。
USB轉(zhuǎn)TTL電路設(shè)計(jì)
在控制器原理圖設(shè)計(jì)中,集成了如下USB轉(zhuǎn)TTL電路。 這個(gè)電路比較常見,它支持串口通信,與STM32程序一鍵下載功能(可省去購買仿真器)。
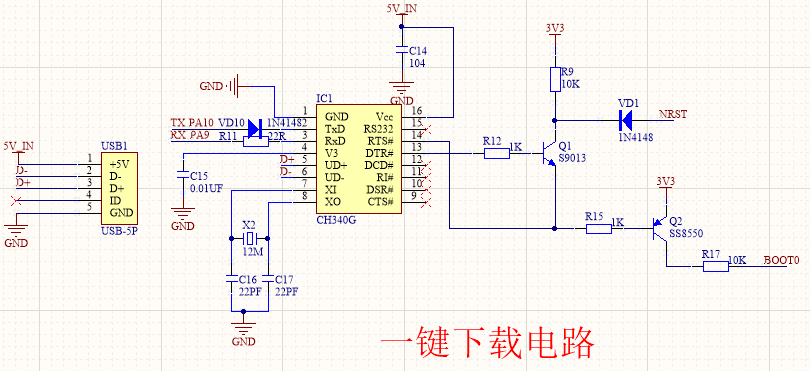
在電路中VD10用于防止電流倒灌,防止在STM32不需要供電時(shí),CH340G芯片的TX引腳依然給主控芯片供電引起的程序的錯(cuò)誤執(zhí)行情況。
芯片中V3引腳除了在不同電壓供電模式下接法不同,對于電容數(shù)值選用也是需要注意的。 V3引腳的電容用于內(nèi)部電源節(jié)點(diǎn)退耦,來改善USB傳輸過程中的EMI,通常容量在4700pF到0.1uF范圍,建議容量為0.01uF。
在CH340G芯片設(shè)計(jì)中需要外接12M石英晶振和與之匹配的22pf高頻起振電容。 為芯片在通信過程中提供時(shí)鐘基準(zhǔn)。 在PCB布局和布線時(shí)需要保證晶振走線盡可能短,在晶振走線下方不要布其他信號線,當(dāng)條件允許時(shí),可以對晶振走線進(jìn)行包地處理,以防止時(shí)鐘信號受到干擾。
STM32一鍵下載電路實(shí)現(xiàn)原理
下面我們來看看CH340G是如何實(shí)現(xiàn)STM32一鍵下載功能的。
STM32有以下三種啟動(dòng)模式:
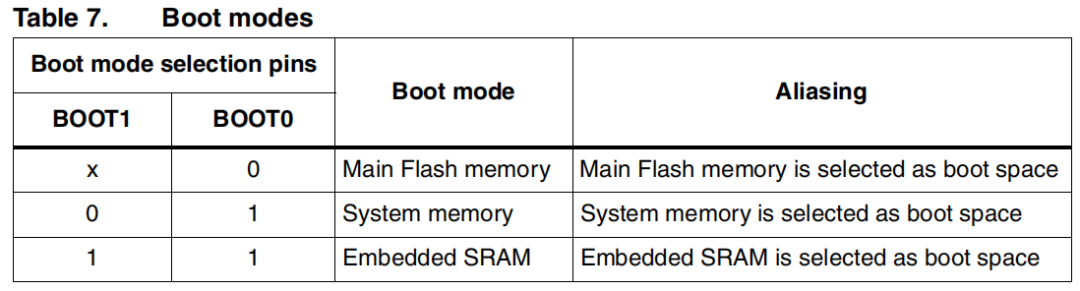
從表中可以知道,使用串口燒寫程序,需要配置BOOT0為1,BOOT1為0,如果想STM32一復(fù)位就運(yùn)行代碼,需要配置BOOT0為0,BOOT1配置為什么都可以,為了實(shí)現(xiàn)這個(gè)功能,可以設(shè)計(jì)一個(gè)電路,通過CH340G芯片的DTR#和RTS#引腳的信號來控制電路狀態(tài),從而間接控制STM32的RESET和BOOT0引腳的信號, 實(shí)現(xiàn)一鍵下載功能。 控制電路如下圖所示:
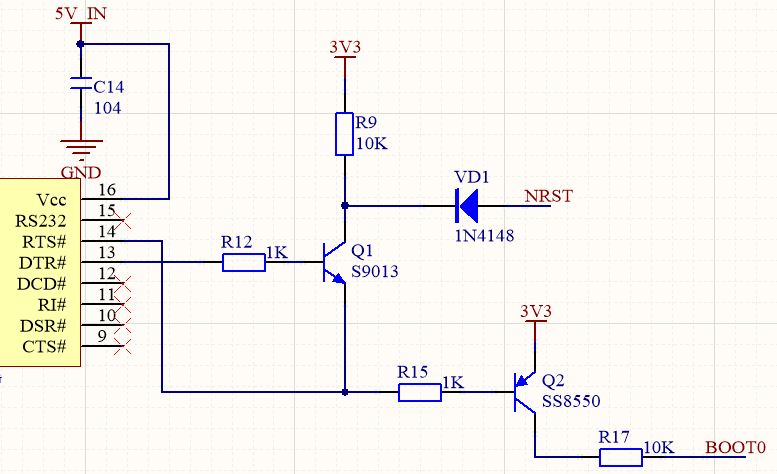
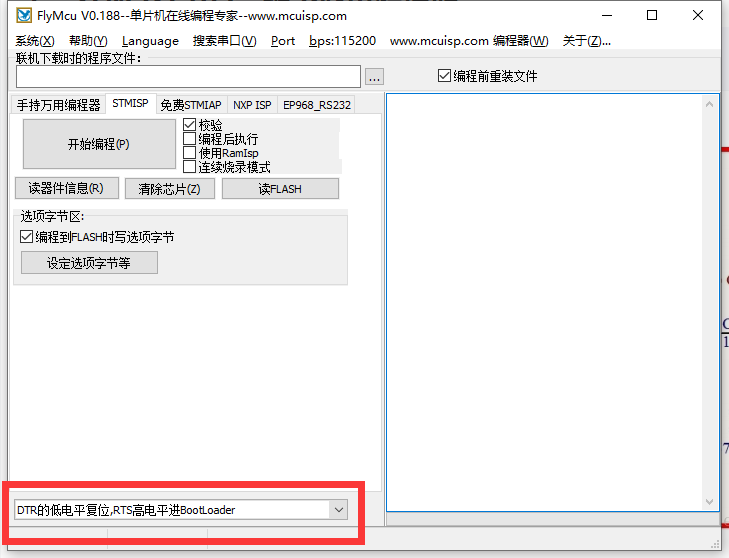
當(dāng)使用FlyMcu軟件時(shí)需要選擇DTR的低電平復(fù)位,RTS高電平進(jìn)BootLoader模式,如下圖所示,這樣在進(jìn)行程序燒寫時(shí),DTR和RTS引腳就能夠進(jìn)行控制一鍵下載電路在適當(dāng)?shù)臅r(shí)刻,使STM32復(fù)位引腳和BOOT0處于正確的電平,實(shí)現(xiàn)STM32復(fù)位與程序燒寫。
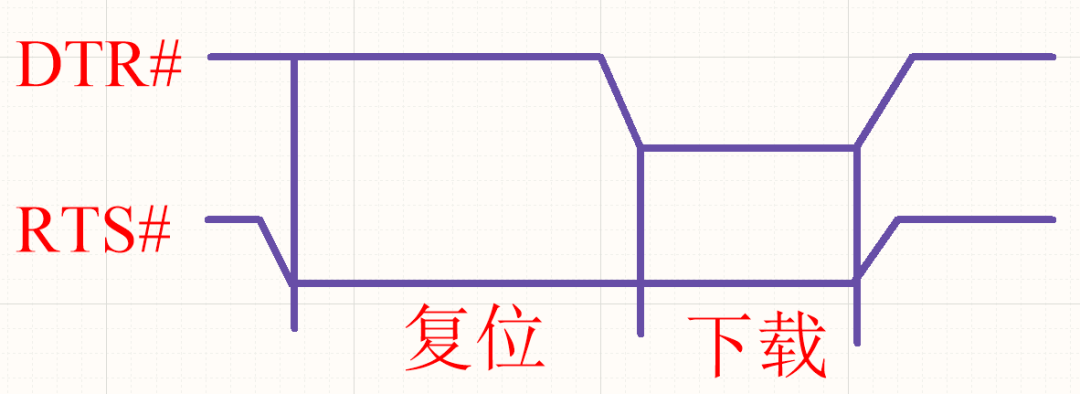
首先FlyMcu控制DTR置低,則DTR#輸出高電平,同時(shí)RTS置高,則RTS#輸出低電平。 這時(shí)三極管Q1和Q2同時(shí)導(dǎo)通,NRST引腳被拉低單片機(jī)復(fù)位,BOOT0引腳拉高為1。 延時(shí)一段時(shí)間后FlyMcu控制DTR為高電平,則DTR#為低電平,RTS#持續(xù)保持為低電平,三極管Q1截止單片機(jī)停止復(fù)位,此時(shí)BOOT0依然維持高電平1,單片機(jī)進(jìn)入ISP模式,這時(shí)就可以實(shí)現(xiàn)STM32一鍵燒寫程序了。 其中DTR#和RTS#的波形如下圖所示。
-
接口電路
+關(guān)注
關(guān)注
8文章
466瀏覽量
57179 -
控制器
+關(guān)注
關(guān)注
112文章
16444瀏覽量
179423 -
STM32
+關(guān)注
關(guān)注
2272文章
10923瀏覽量
357531 -
移動(dòng)機(jī)器人
+關(guān)注
關(guān)注
2文章
765瀏覽量
33647 -
ROS
+關(guān)注
關(guān)注
1文章
280瀏覽量
17094
發(fā)布評論請先 登錄
相關(guān)推薦
資料:移動(dòng)機(jī)器人能否自動(dòng)充電?
Labview My RIO 移動(dòng)機(jī)器人
機(jī)器人、協(xié)作機(jī)器人和移動(dòng)機(jī)器人,你分的清楚嗎
如何實(shí)現(xiàn)移動(dòng)機(jī)器人的設(shè)計(jì)?
請問怎么設(shè)計(jì)一種室外移動(dòng)機(jī)器人組合導(dǎo)航定位系統(tǒng)?
什么是移動(dòng)機(jī)器人軟硬件系統(tǒng)問題
最實(shí)用的STM32和ROS機(jī)器人的串口通信方案
差速移動(dòng)機(jī)器人軌跡跟蹤控制方法
移動(dòng)機(jī)器人的三種主要運(yùn)動(dòng)系統(tǒng)
詳解移動(dòng)機(jī)器人軟硬件系統(tǒng)問題
如何利用掃地機(jī)輪子制作ROS移動(dòng)機(jī)器人地盤
電機(jī)在ROS移動(dòng)機(jī)器人系統(tǒng)中的作用
基于Matlab和VR技術(shù)的移動(dòng)機(jī)器人建模及仿真
制作ROS移動(dòng)機(jī)器人地盤






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論