 舵機中的直流電機控制原理和方法
舵機中的直流電機控制原理和方法
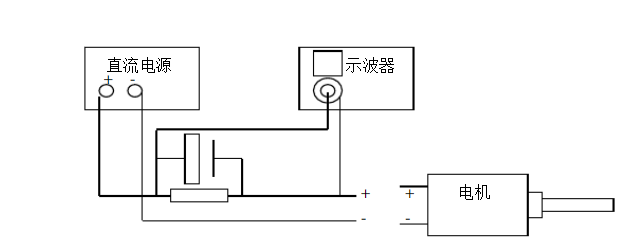
本文簡單介紹在舵機中的直流電機控制原理和方法。下圖是控制器原理圖,單片機選擇stm32f030,驅動選擇fm116b,ldo為lp2992,這個可以任意選擇兼容的芯片,電壓反饋端用tl431進行分流穩壓,確保反饋電阻器供電電壓的穩定。
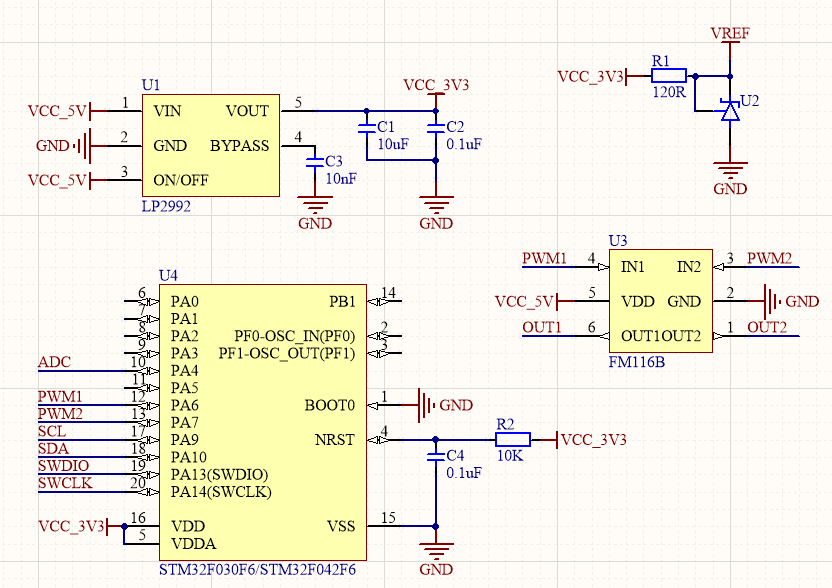
舵機的工作原理很簡單,處理器實時獲取電阻器的ADC值來計算獲得當前的角度,如果與預期的角度一致,就不做任何操作,保持當前狀態;如果與預期角度不同,就計算出當前角度與預期角度的差值,然后通過PID算法計算出控制量,根據控制量輸出PWM控制電機旋轉,隨著電機旋轉,實時角度會越來越接近預期值,控制輸出也會越來越小,直到最后為0,就轉到了預期的位置。
本方案通過I2C接口獲取控制命令,可以實現比傳統模擬方式更多的功能。
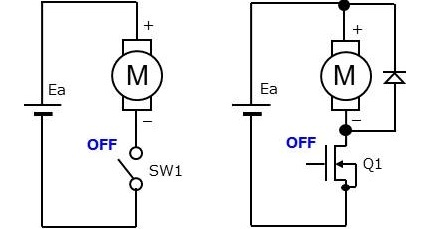
PWM1和PWM2控制電機轉速和方向,當PWM1輸出高電平而PWM2輸出低電平就是正轉,反之就是反轉,如果二者都輸出低電平就停止。
ADC值需要標定,確定舵機角度為0和180時的ADC采樣值,這樣才能通過比例計算出任意ADC值對應的角度。
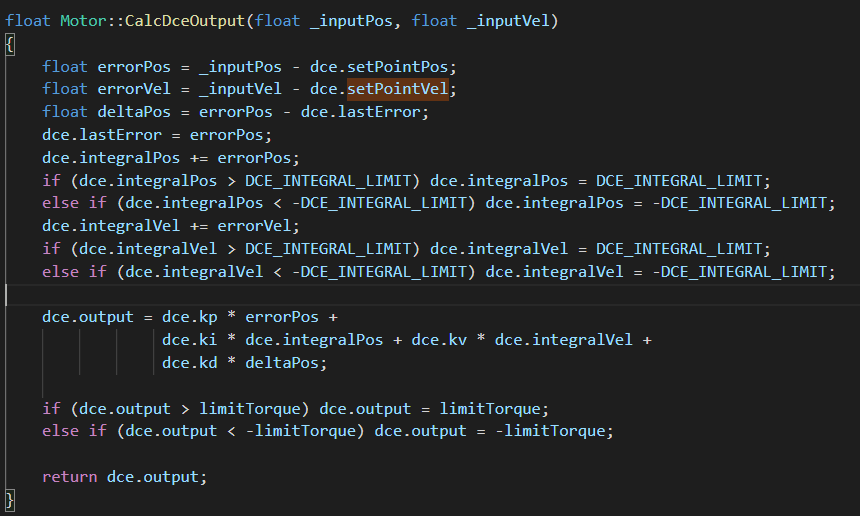
PID這里,ADC得到的角度減去預期角度就是角度差,乘以比例系數構成比例項;角度差的和乘以積分系數構成積分項,積分項要設置上限,防止該值過大影響響應速度;本次角度差與上一次的角度差的差乘以微分系數構成微分項(這里用固定的時間采樣,dt固定,故不需要計算變化率了)。三者之和就是預期的輸出值,再根據輸出限制得到最終的輸出值,該值可正可負,注意變量選取要合適。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6043文章
44619瀏覽量
638471 -
控制器
+關注
關注
112文章
16444瀏覽量
179423 -
直流電機
+關注
關注
36文章
1710瀏覽量
70410 -
adc
+關注
關注
99文章
6533瀏覽量
545735 -
舵機
+關注
關注
17文章
280瀏覽量
41188
發布評論請先 登錄
相關推薦
動手玩轉Arduino---運動控制(直流電機步進電機舵機)
動手玩轉Arduino---運動控制(直流電機步進電機舵機)(電源技術是中文核心嗎)-該文檔為動手玩轉Arduino---運動控制(
發表于 09-23 09:22
?36次下載

驅動有刷直流電機的簡便方法
驅動有刷直流電機的簡便方法本文將從非常基礎的部分開始介紹驅動有刷直流電機的方法。可能大多數人都有在小學的理科實驗中或手工作品中將電池連接到有
直流電機控制的基本方法
直流電機是一種最基本的電動機類型之一,其速度和方向可以通過控制電流來實現。直流電機常常作為工業控制系統的主要組成部分,其他領域也廣泛應用。
直
發表于 03-26 22:21
?7591次閱讀
直流電機及PWM介紹
直流電機是一種將電能轉換為機械能的裝置。一般的直流電機有兩個電極,當電極正接時,電機正轉,當電極反接時,電機反轉
直流電機主要由永磁體(定
發表于 03-30 11:36
?3次下載
直流電機調速實驗
直流電機是一種將電能轉換為機械能的裝置。一般的直流電機有兩個電極,當電極正接時,電機正轉,當電極反接時,電機反轉。直流電機主要由永磁體(定子
發表于 03-30 14:14
?1次下載
永磁無刷直流電機的控制方法
永磁無刷直流電機(BLDCM)因其高效率、高功率密度、低維護成本等優點,在電動汽車、航空航天、工業自動化等領域得到了廣泛應用。為了充分發揮永磁無刷直流電機的性能,采用合適的控制方法至關





 工商網監
工商網監
評論